基于Ransac算法的捷变频联合正交频分复用雷达高速多目标参数估计
2021-07-29全英汇沙明辉李亚超邢孟道
全英汇 高 霞* 沙明辉 方 文 李亚超 邢孟道
①(西安电子科技大学电子工程学院 西安 710071)
②(北京无线电测量研究所 北京 100854)
③(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
1 引言
随着现代电子技术的迅速发展,电磁环境日益复杂,雷达面临的威胁不断增多,目标检测和参数估计的能力受到严重影响。为了提高综合作战性能,许多新体制雷达应运而生[1,2]。而广泛应用于通信领域的正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM)技术也被引入到雷达系统中,其易于实现频谱资源控制和无线环境下的高速传输的优势,吸引了大批学者的关注[3,4]。在雷达中,利用OFDM信号的大时宽带宽积特性进行脉冲压缩等处理,可以获得目标的距离和多普勒信息,因此,OFDM信号具备了雷达网间通信与目标探测的双重优势[5]。文献[6]将OFDM信号运用于多输入多输出(Multiple Input Multiple Output,MIMO)雷达,研究了雷达通信一体化信号的共享设计。文献[7,8]在步进频雷达中采用了OFDM技术,采用离散傅里叶变换(Discrete Fourier Transform,DFT)技术合成目标的距离-速度2维像,但是该方法的前提是目标个数少并且速度相似,当观测场景内存在多个速度相差很大的目标时,这一方法不再适用。文献[9]提出了两种捷变频联合正交频分复用(Frequency Agility-OFDM, FA-OFDM)雷达信号形式,并且分析了两种信号的模糊函数,为FA-OFDM雷达的回波信号处理提供了思路。然而,对于FAOFDM雷达而言,发射信号的频率随机跳变导致回波相位不连续,使得雷达难以对目标进行检测,其目标参数估计仍是一个亟待解决的问题。文献[10]提出了步进频OFDM雷达实现距离高分辨的方法,但是该方法对速度敏感,只适用于低速目标。文献[8]针对步进频OFDM雷达多目标参数估计问题,提出了一种改进的DFT信号处理方法,该方法以较低的A/D采样率在不增加计算量的同时获取目标距离-速度信息。文献[11]针对FA-OFDM雷达通过合成不同载波的多个窄带信号来实现距离高分辨,但是该方法只适用于静止或低速目标。文献[8]研究了频率捷变稀疏OFDM雷达目标参数估计的问题,通过对多个窄带子载波采用压缩感知技术处理,等效合成大带宽,获取目标高分辨距离-速度信息,但该方法只对低速目标进行了研究。文献[12]针对OFDM雷达,提出了一种基于通道分离和最大似然原理相结合的运动参数估计方法,利用Keystone变换CLEAN技术对距离-多普勒2维谱进行谱峰搜索,获得各个目标的位置和速度参数估计量,但该方法采用牛顿迭代算法对似然函数进行优化,运算量过大。基于此,文献[13]提出了一种基于期望最大化算法的捷变频联合正交频分复用雷达高速多目标参数估计的方法,但是该方法只适用于信噪比较高的情况,当有大量噪声存在时该方法几乎完全失效。针对上述问题,本文提出一种基于随机抽样一致算法(Random sample consensus, Ransac)的FA-OFDM雷达高速多目标参数估计的方法。本方法不仅能够获得目标的高分辨距离信息,还可以在低信噪比情况下有效地对高速多目标的速度进行同时估计。
2 FA-OFDM雷达信号模型
OFDM雷达发射波形设计灵活,理论上可以进行任何形式的调制,最常见的有线性调频调制(Linear Frequency Modulation, LFM)和相位编码(Phase Coded, PC)调制。本文采用LFM调制,发射信号示意图如图1所示。FA-OFDM雷达发射脉间载频捷变的信号,并且每个脉冲宽度内同时发射多个频率随机跳变的子载波,从而获得大的时宽带宽积,提高雷达分辨率,同时使得雷达能有效地规避窄带瞄准式干扰。
图1中,Tp表示脉冲宽度,Tr表示脉冲重复周期。FA-OFDM雷达的发射信号可以写为
图1 FA-OFDM雷达发射信号示意图

3 基于IAA的目标高分辨距离合成方法
正如文献[13]所述,由于载频捷变导致回波信号的多普勒相位不连续,许多学者采用基于压缩感知(Compress Sensing, CS)的方法实现目标稀疏重构[14,15]。而FA-OFDM信号是在1个脉冲宽度内同时发射多个频率捷变的子载波。因此,对单个脉冲的所有子载波回波信号先进行脉冲压缩,再通过CS实现稀疏重构,即可得到目标在该时刻的高分辨距离信息[13]。本文采用迭代自适应谱估计(Iterative Adaptive Approach, IAA)方法代替基于CS的稀疏重构方法来合成目标的高分辨距离[16]。
对第n个脉冲的回波而言,匹配滤波输出为
与基于CS的稀疏重构方法类似,当目标场景满足稀疏性时,IAA算法也可以用于目标的距离维谱估计。该算法是由Jensen等人在2009年提出的[17–19],它的基本思想是通过循环迭代,利用上一次迭代的谱估计结果构建信号协方差矩阵,并将其逆阵作为加权矩阵代入加权最小二乘中求解。
优化问题式(9)的解为
其中

表示细分辨距离单元,δ(·)为单位冲激函数。
假设3个相邻目标位于第290个粗分辨单元,细分辨距离单元的索引分别为[4, 13, 20]。FA-OFDM雷达系统在单个脉冲宽度内同时发射多个频率捷变的子载波,合成大带宽,提高了距离分辨率。对第1个脉冲中所有子载波的回波进行匹配滤波的输出如图2(a)所示,可以看出结果中只有1个峰值,无法正确检测目标个数。而采用IAA方法合成目标高分辨距离的结果如图2(b)所示,3个相邻目标可以被准确区分。
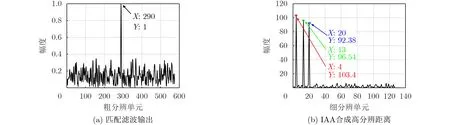
图2 3个相邻目标仿真结果图
4 基于Ransac算法的高速多目标速度估计
如第2节和第3节所述方法,通过对不同脉冲时刻的回波进行匹配滤波和迭代自适应谱估计,得到多个目标在不同时刻的距离高分辨信息。根据目标的时刻-距离直线的斜率来估计目标的速度。当观测场景中只存在单个目标时,可以采用最小二乘法来拟合直线,但当存在多个目标时,最小二乘法不再适用。文献[13]提出了基于EM算法的多目标速度估计方法,这一方法虽然可以对高速运动的多目标进行有效的速度估计,但是对目标回波的信噪比要求比较高,当信噪比低于一定值时,谱估计的结果中出现很多无效的噪声点,它们会严重影响EM算法的性能,甚至可能导致直线拟合失败。为了解决这一问题,本文提出了一种基于Ransac算法的高速多目标速度估计方法。
4.1 Ransac算法
随机抽样一致算法(Ransac),最早是由Fischler和Bolles提出用于解决位置确定问题(Location Determination Problem, LDP)的。Ransac算法采用迭代的方式从一组包含离群的观测数据中估算出数学模型的参数,广泛应用于直线拟合、平面拟合等方面[20,21]。数据中包含正确数据记为“内点”和异常数据(或称为噪声)记为“外点”。Ransac算法是一种不确定算法,它只能在一定概率下产生结果,并且这个概率会随着迭代次数的增加而提高。
设内点在数据中所占的比例为ρ,迭代次数为i,则采用Ransac算法得到正确模型的概率为

ξ为求解模型所需的最小数据点数。通过式(14)可以求得

4.2 基于Ransac算法的参数估计
本节针对多个目标的数据点构造多个直线模型,基于Ransac算法的直线拟合的步骤如下:
(1) 输入各采样时刻及其对应的高分辨距离,称为观测数据集;
根据式(12)可以得到Y个观测数据(ty,{Ry})。{Ry}表示ty时刻多个目标经过稀疏重构得到的高分辨距离,由于噪声点(外点)的存在,{Ry}是一个长度不确定的集合。实际观测数据的个数(内点个数+外点个数)通常会大于理论观测数据的个数(内点个数),满足Y ≥G×N。
(2) 输入要拟合的直线数目(即目标个数)G;
(3) 针对每条直线,确定适用于模型的最小数据个数为2,两点确定一条直线;
从观测数据集中随机选取2个点,构造直线模型,记为最优直线Rbest。第g个目标的直线模型可以表示为
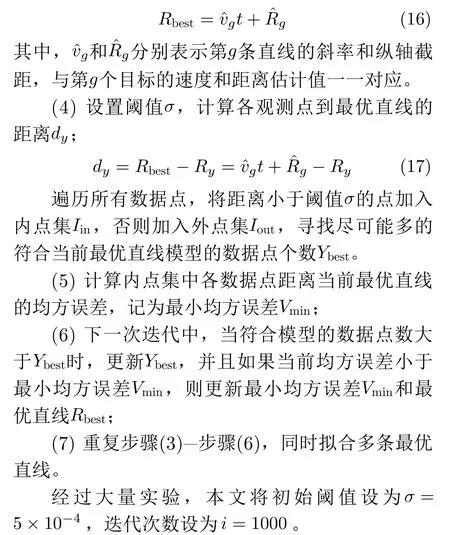
综上,本文所提算法的信号处理流程图如图3所示。
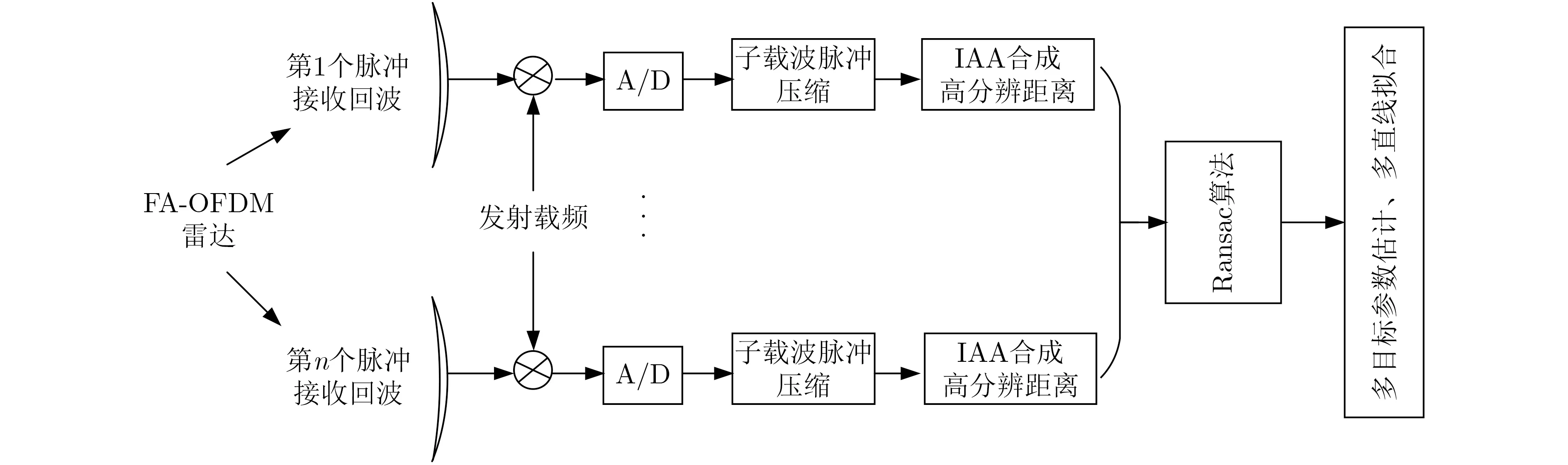
图3 基于Ransac算法的高速多目标参数估计方法的流程图
5 仿真结果及分析
5.1 仿真结果
为了验证所提算法的有效性,本节分别对文献[13]和所提算法进行了仿真与分析。FA-OFDM雷达的发射信号如图1所示,实验参数如表1所示。
高信噪比情况:取输入信噪比为–12 dB。如表1所示,在FA-OFDM雷达中1个CPI内有64个脉冲,每个脉冲宽度内发射64个频率随机跳变的子载波,合成大带宽,距离分辨率得以提高。远场观测场景内存在3个不同距离、不同速度的目标,经过目标散射后,雷达回波信号中包含了目标的时延和多普勒信息。首先对单个脉冲内的所有子载波回波信号进行脉冲压缩获得粗分辨距离信息,如图4(a)所示,再通过IAA方法合成高分辨距离,结果如图4(b)所示。根据峰值所在的位置计算出3个目标的距离分别为[3993.9, 4002.4, 4005.7] m,与真实距离的误差均小于0.1%。进一步地,分别对64个脉冲回波采用IAA方法合成目标高分辨距离,得到时间-距离图,如图4(c)所示。将各个脉冲时刻及其对应的高分辨距离信息构成观测数据集,按照4.2节所述步骤,采用Ransac算法同时拟合多条直线,结果如图4(e)所示。而按照文献[13]中所提的EM算法进行直线拟合的结果如图4(d)所示。对比图4(d)和图4(e),可以看出两种方法均可同时拟合3条直线,由此估计的目标速度误差均小于0.9%,当信噪比为–12 dB时,两种算法都可以有效地对多目标的速度进行估计。
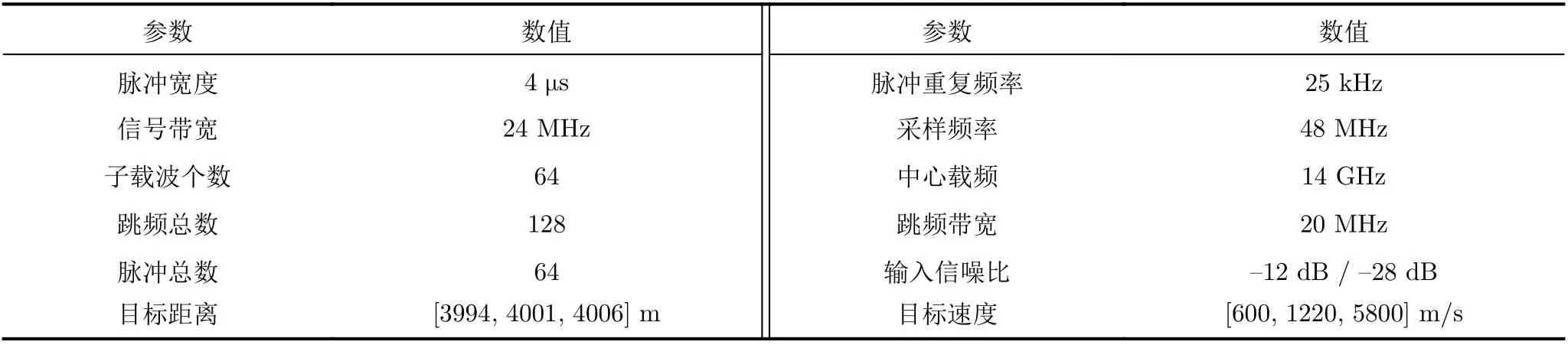
表1 仿真参数
低信噪比情况:取输入信噪比为–28 dB。与图4对比,图5(a)为3个目标的时间-距离图,可以看出当输入信噪比过低时,有大量噪声点出现,这会严重影响直线拟合的性能。作者在文献[13]中所提EM算法的直线拟合结果如图5(b)所示,尽管拟合出了3条直线,但其斜率对应的速度与真实目标速度相差甚远,无法对目标进行正确的参数估计,文献[13]所提算法几乎完全失效。而采用本文所提Ransac算法进行直线拟合的结果如图5(c)所示,可以看到3条直线被成功拟合,其直线斜率对应的速度分别为[614.19, 1195.79, 5918.56] m/s,相对误差分别为2.37%, 1.98%, 2.04%。在一定误差允许范围内,本文所提算法可以有效地同时对多目标的速度进行准确估计。

图4 信噪比为–12 dB时的仿真结果
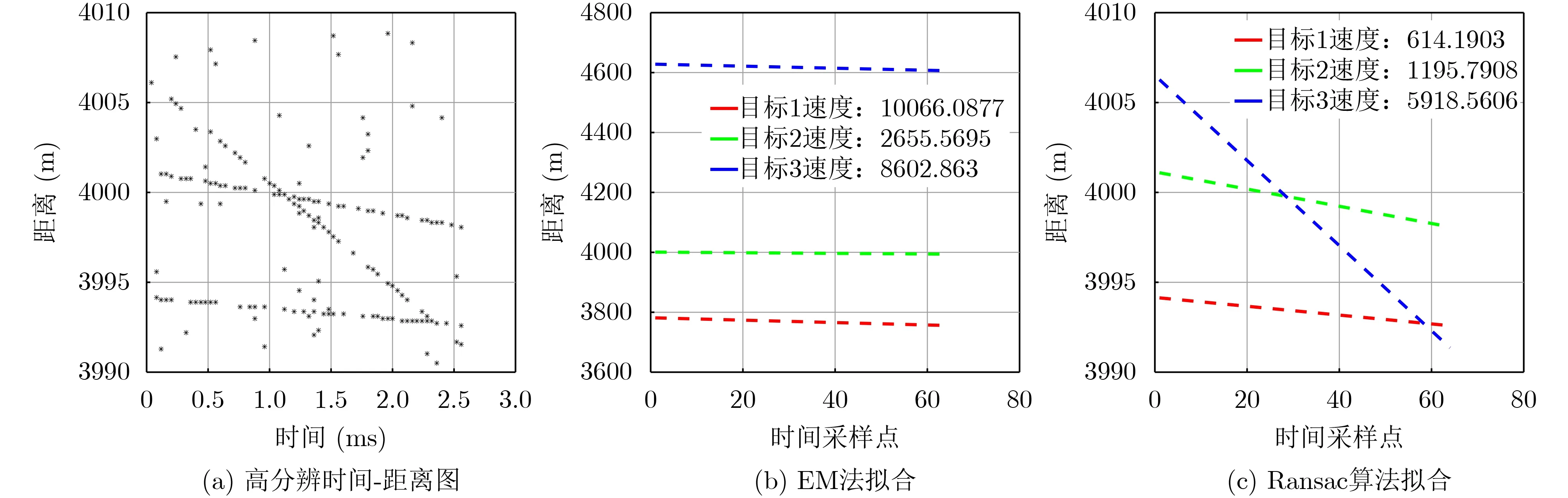
图5 信噪比为–28 dB时的仿真结果
5.2 性能分析
为了进一步研究所提算法在不同条件下的性能,本节参照文献[13]分析了不同输入信噪比(接收回波的信噪比)情况下的检测概率以及同速度条件下的估计误差。
首先,研究了输入信噪比在–32~20 dB(对应输出信噪比为–4~8 dB)[13]范围内变化时的检测概率,1000次蒙特卡罗仿真的结果如图6所示。当信噪比高于7 dB时,两种算法的检测概率均为1,可以准确地对多个目标的速度进行估计;随着输入信噪比的降低,检测概率逐渐下降。当信噪比低于2 dB时,文献[13]中算法的检测概率降至0,而采用本文算法的检测概率为0.8,仍然可以对目标进行参数估计;直至信噪比降低到–3 dB时,本文算法的检测概率也降为0,无法同时对多个目标速度进行估计。相比于文献[13]中的算法,本文所提算法对输入信噪比的要求降低了约5 dB,更有利于微弱目标的检测与参数估计。
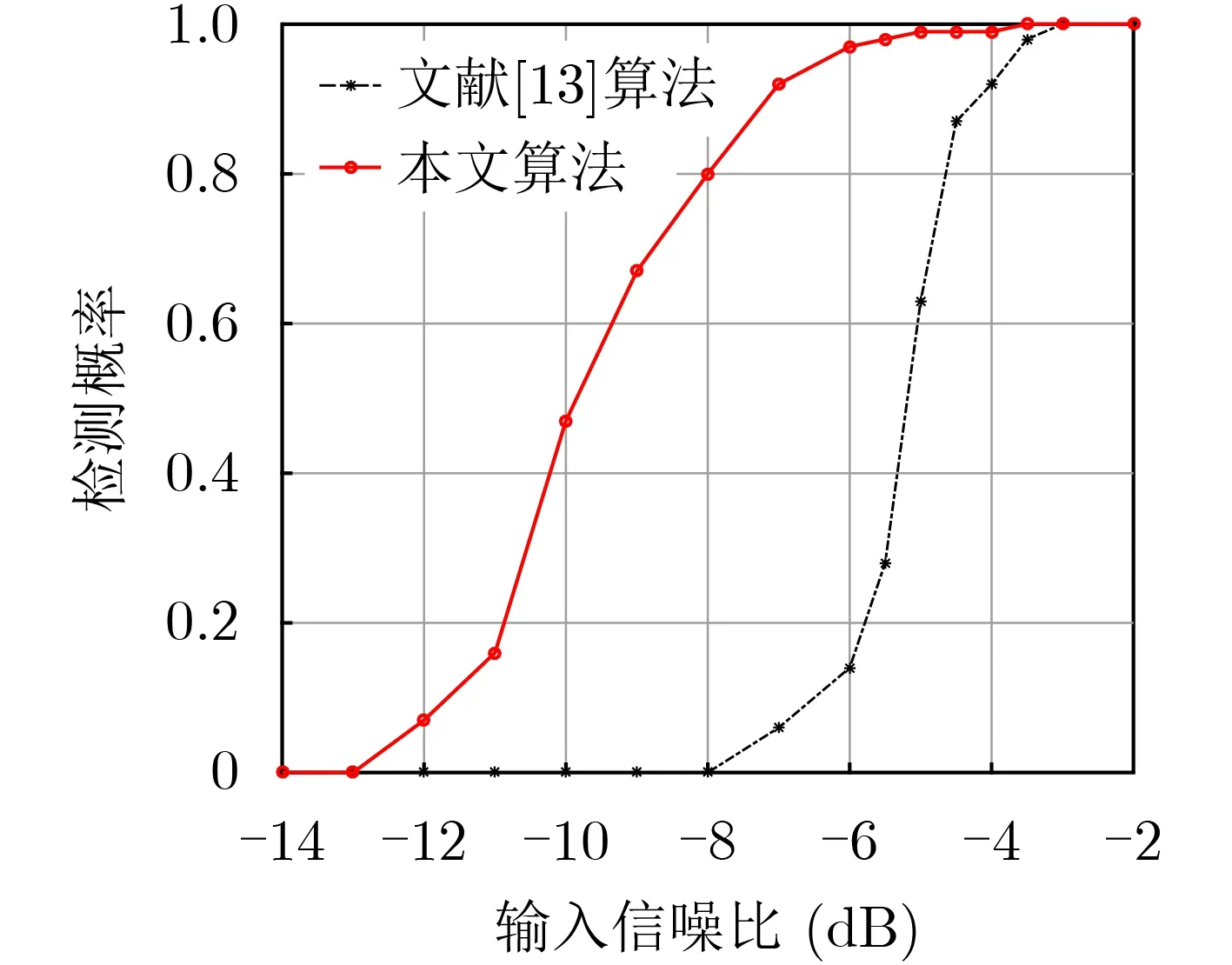
图6 信噪比对检测概率的影响
此外,目标本身的速度也会影响其相对估计误差。设定输入信噪比为–26 dB(输出信噪比为2 dB),分析不同速度下的相对估计误差,作1000次蒙特卡罗仿真,结果如图7所示。与文献[13]中所提算法类似,随着目标自身速度的增大,相对误差逐渐减小。然而,对比两条曲线可以看出当目标速度相同时,本文算法的相对误差大于文献[13]算法。当目标速度大于1000 m/s时,文献[13]算法的相对误差小于0.1%,可以忽略不计;而同样要使相对误差小于0.1%,本文算法则要求目标速度大于4000 m/s。
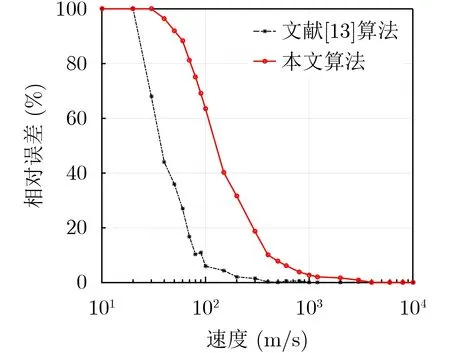
图7 目标速度对估计误差的影响
通过本文所提算法对多个目标的速度进行估计,其均方根误差(Root-Mean-Square Error, RMSE)随输出信噪比的变化曲线如图8所示。可以看出与文献[12]相比,本文算法具有更好的估计精度,随着信噪比的增大,其RMSE越接近于Cramer-Rao下限。
综合图6–图8可以看出本文所提高速运动目标的参数估计算法更适用于低信噪比的情况,且估计误差更小。
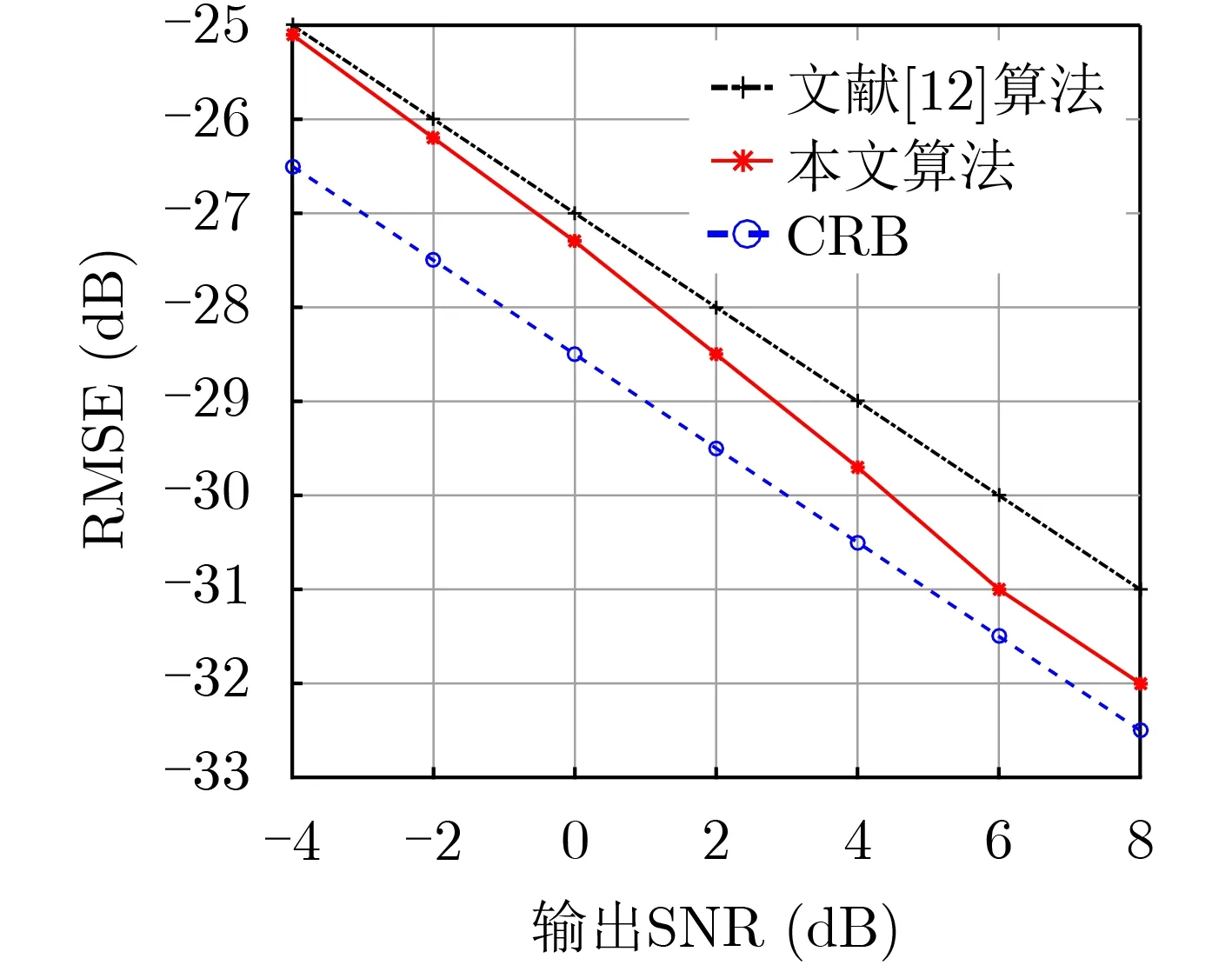
图8 输出SNR对RMSE的影响
6 结束语
针对现代电子战场中雷达对目标检测与参数估计的迫切需求,本文提出了一种基于Ransac算法的FA-OFDM雷达高速多目标参数估计的方法。依据FA-OFDM信号的大带宽特性,采用IAA方法合成各个脉冲时刻的目标高分辨距离,再采用Ransac算法进行多直线拟合,实现对高速运动的多目标进行同时参数估计。相比文献[13]所提算法,本文算法对输入信噪比的要求降低了约5 dB,并且当目标速度大于4000 m/s时,速度估计的相对误差小于0.1%,更有利于对低信噪比条件下高速运动目标的参数估计。
