自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法
2021-07-29李睿项昌乐王超范晶晶刘春林
李睿,项昌乐,王超,范晶晶,刘春林
(1.北京理工大学 机械与车辆学院,北京 100081;2.中国北方车辆研究所 总体技术部,北京 100072;3.中国北方车辆研究所 底盘部件技术部,北京 100072;4.北方工业大学 城市道路交通智能控制技术北京市重点实验室,北京 100144)
0 引言
履带车辆是陆战装备体系的重要组成部分,随着装备智能化的持续发展,履带车辆必然向无人化、自动化、智能化方向转型升级,构成未来空、天、云、地、网一体化作战体系中的重要环节。因此,履带车辆运动控制系统的性能是保证自动驾驶履带车辆完成作战任务的重要保障。然而实现履带车辆自动驾驶面临如下难点:1)履带车辆本身是典型的多输入多输出、非完整、强非线性系统,且质量大、运动惯性大,动力学与运动学模型相互耦合,难以表征;2)履带车辆一般工作在野外环境,地面崎岖不平且松软程度不同,履带与地面相互作用构成刚-柔耦合非线性系统,履带相对于地面存在侧滑、滑移、滑转等,难以精确实时测量;3)实现高精度轨迹跟踪还需充分考虑未建模动态、参数扰动、执行器饱和输入及外界随机干扰等不确定因素。因此,研究自动驾驶履带车辆的高精度轨迹跟踪控制方法,是应对未来陆战装备无人化、自主化的必由之路,具有重要的学术意义和应用价值。
针对传统履带车辆的运动控制问题,国内外学者目前已做了大量研究工作。文献[1]分析了电子差速履带车辆转向动力学和运动学,提出了一种电子差速履带车辆转向神经网络PID控制方法,并通过不同转向工况下的实车实验验证了该方法在低速转向时具有良好的操控性能。文献[2]提出了双电机耦合驱动履带车辆自适应滑模转向控制方法,该方法将车速控制和转向控制进行解耦,分别建立了基于鲁棒滑模变结构控制方法的车速控制系统和基于模糊滑模自适应控制算法的转向控制系统,并通过“驾驶员-控制器”双在环半实物仿真实验验证了所提算法的有效性。文献[3]针对双侧电机驱动履带车辆运动控制强耦合和不确定的特点,提出了速度与横摆角速度解耦的控制结构,同时建立了积分滑模速度控制器和模糊自适应横摆角速度控制器,并通过多个工况的仿真实验验证了所提控制策略能够使得履带车辆快速准确地实现直线和转向运动控制。文献[4]针对电传动履带车辆行驶工况复杂多变、两侧电机速度难以保持恒定实现稳定行驶的难题,结合线性自抗扰算法提出一种电子差速控制策略,从而抑制扰动、提高系统动态性能。通过上述分析可知,当前履带车辆运动控制研究大都将纵向控制和横向控制进行解耦,分别设计车速控制器和转向控制器进行运动控制。然而在履带车辆行驶过程中,纵向控制模型和横向控制模型存在强耦合,不可能实现完全解耦,完全无法满足履带车辆高精度运动控制的要求。在自动驾驶履带车辆轨迹跟踪控制方面,当前研究则很少涉及。文献[5]提出了一种前馈模型加PID补偿器的自动驾驶履带车辆轨迹跟踪控制方法,并通过MATLAB/Simulink软件进行了仿真测试。文献[6-7]基于模型预测控制方法设计了轨迹跟踪控制器,实现了自动驾驶履带车辆的轨迹跟踪控制。但是,当前自动驾驶履带车辆控制同样基本是基于车速控制和转向控制解耦来实现,没有考虑车辆在运动中的纵横向耦合特性,同时也没有考虑车辆在行驶过程中的路面变化、执行器饱和及外界随机干扰等不确定性因素的影响,这些因素不仅影响自动驾驶履带车辆轨迹跟踪控制系统的性能和稳定性,而且影响自动驾驶履带车辆完成特定任务的完整度,甚至导致任务的失败而造成严重后果。因此亟待探索复杂环境考虑动力学与运动学耦合的自动驾驶履带车辆轨迹跟踪控制方法。
本文针对上述问题,首先基于拉格朗日方程建立自动驾驶履带车辆的运动学与动力学耦合模型;在此基础上,针对模型非线性导致轨迹跟踪难以精确控制的问题提出自适应控制方法,以实现对控制系统前馈、抵消模型非线性的影响;进而通过误差符号鲁棒积分进行状态反馈,以抑制模型不确定性和外界随机干扰的影响,实现在执行器力矩受限情况下的系统渐进稳定,提升轨迹跟踪控制系统的稳态和暂态性能。
1 自动驾驶履带车辆运动学与动力学耦合建模
1.1 自动驾驶履带车辆运动学建模
本文研究对象为自动驾驶双侧电机驱动履带车辆,属于典型差速转向履带车辆,主要通过控制左右两侧主动轮转速控制速度和方向,实现对决策系统期望轨迹的精确跟踪控制。自动驾驶履带车辆运动学示意如图1所示。图1中,Oxy为大地坐标系,CxCyC为履带车辆坐标系,C为履带车辆几何中心和质心的重合点,B为两侧履带中心距离,r为主动轮半径,l为履带长度,θ表示履带车辆的航向角。
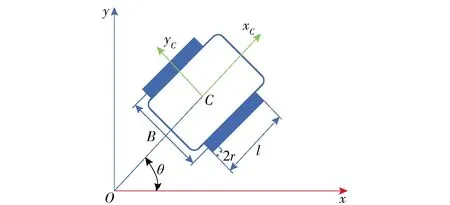
图1 自动驾驶履带车辆运动学示意图
在进行运动学分析时,假设履带车辆几何中心和质心重合,定义自动驾驶履带车辆的状态量为q=(x,y,θ)T,其中(x,y)表示履带车辆的位置。不考虑滑动因素,根据理论力学原理,履带车辆在OXY坐标系中的运动学模型[8]为
(1)

(2)
由(2)式可得
(3)
(3)式代入(1)式,可得
(4)
由(4)式可知,履带车辆系统状态量由3个变量组成,而控制量则为2个,因此履带车辆为典型非完整系统,履带车辆的控制问题受到Brockett条件的限制[11]。
1.2 自动驾驶履带车辆动力学建模
根据拉格朗日动力学建模方法,履带车辆系统在运动过程中的动力学模型可表示为
L=E-P,
(5)
式中:L表示拉格朗日函数;E表示履带车辆系统动能;P表示履带车辆系统势能。则履带车辆系统动能[12]为
(6)
式中:m为履带车辆的质量;J为履带车辆围绕质心转动的转动惯量。由于履带车辆是在地面上行驶,系统势能为0,从而有履带车辆系统的拉格朗日函数为
(7)

(8)
式中:Q为广义力矩阵,Q=B(q)τ,B(q)∈R3×2,τ=(τ1,τr)T表示左右两侧电机轴输出力矩;A(q)表示约束矩阵;λ为约束向量。根据(1)式可得
(9)
因此,(8)式受到的非完整约束为
(10)
式中:A(q)=(sinθ,-cosθ,0)。同时,由(7)式可知
(11)
(11)式对时间t求导,可得
(12)
则根据(8)式、(11)式、(12)式可得
(13)

(14)
自动驾驶履带车辆在行驶过程中受到地面摩擦力及坡度变化、路面参数变化、风阻、滑转及滑移等复杂外界干扰影响,综合考虑上述影响,得到履带车辆动力学模型[13]如下:

B(q)τ+AT(q)λ,
(15)
1.3 自动驾驶履带车辆运动学和动力学耦合建模
自动驾驶履带车辆运行过程中,运动学和动力学模型始终是耦合作用的,共同影响自动驾驶履带车辆轨迹跟踪控制系统性能,因此根据(4)式和(15)式定义辅助变量q1,则有
(16)

ST(q)AT(q)=0.
(17)
对(16)式进行求导,得
(18)
(18)式代入(15)式,得

G(q)+d(t)=B(q)τ+AT(q)λ,
(19)

(20)
式中:
为了便于分析和设计控制方法,给出(19)式的性质如下:

2 控制目标
自动驾驶履带车辆在轨迹跟踪时的控制目标为设计一个输入有限、连续的控制器,在系统不确定性及外界干扰的影响下,可以保证系统状态q1(t)可以渐进跟踪期望轨迹q1d(t),即
(21)
定义跟踪误差变量et(t)为
et(t)=(q1d(t)-q1(t)).
(22)
为便于后续分析,(23)式、(24)式定义了非线性滤波跟踪误差en(t)和p,p和ef为辅助误差向量,用于设计自动驾驶履带车辆的轨迹跟踪控制器,tanh(·)表示双曲正切函数,用来合理规划控制输入,β1、β2、β3∈R为非负常数,p不会出现在最终的控制律中,分别表示如下:
(23)
(24)
ef的动态方程系统定义如(25)式所示:
(25)
ef(0,0)=0,γ1与γ2分别表示非负控制增益,cosh(·)表示双曲余弦函数。
双曲正切函数tanh(·)与双曲余弦函数cosh(·)具有性质3.
性质3定义向量ξ=[ξ1,ξ2,…,ξn]T∈Rn,则对于双曲正切函数向量tanhξ=[tanhξ1,tanhξ2,…,tanhξn]T∈Rn与双曲余弦函数矩阵coshξ=diag[coshξ1,coshξ2,…,coshξn]T∈Rn满足如下不等式组[13]:

ξ>tanhξ,
tanhξ2≥tanh2ξ,
ξTtanhξ≥tanhTξtanhξ.
(26)
3 控制方法
3.1 状态反馈跟踪控制分析
(27)
(23)式求导,得到
(28)
(28)式代入(27)式,得到
(29)
(25)式代入(29)式,得
(30)
根据(22)式,得
q1=q1d-et,
(31)
对(31)式求t的2阶导数,得
(32)
(32)式代入(20)式,变换得
(33)
(33)式代入(30)式并简化,得到
(34)

(35)
(36)
因此,自动驾驶履带车辆的状态反馈跟踪控制律为
(37)
式中:u为误差符号鲁棒积分反馈控制项;d表示自适应前馈控制项,
d=Φd,
(38)

(39)

(t)=(0)+

(40)
误差符号鲁棒积分项为
u=γ1tanhΘ,
(41)



(42)
式中:α为正常数。
3.2 误差闭环控制分析
对(41)式求导,得到
(43)
因此,自动驾驶履带车辆轨迹跟踪控制的误差闭环控制方程为
(44)
式中:
(45)
(46)
(47)
式中:xρ=[tanhTet,tanhTen,en,pT,tanhTef]T.根据性质2可得
(48)

4 稳定性分析
4.1 分析方法
在论证误差信号鲁棒积分控制器控制性能之前,先给出如下引理。
引理1定义辅助函数P(t)和辅助变量K(t)如下:

(49)
K(t)=pT(N-αγ1sgnen),
(50)

(51)
定理1针对(20)式所示自动驾驶履带车辆轨迹跟踪控制系统,采用(38)式和(41)式构成的鲁棒积分控制器,可使得系统能够跟踪参考输入,且不受未建模动态与外界干扰的影响。即t→∞时跟踪误差et→0,且所有闭环信号都有界。
证明首先引入如下引理:

(52)

SD={ξ∈D|W2(ξ)≤δ},
(53)
定义Lyapunov函数V如下:
(54)
根据引理2,V满足如下不等式:
W1(χ)≤V≤W2(χ),
(55)
式中:χ为定义的任意列向量。由(26)式和(55)式,可得正定函数W1(χ)与W2(χ)为
(54)式沿时间t求导,则得到
(56)
(22)式、(25)式引入(56)式,得

tanhTen[p-β2tanhen-β3en]+



tanhTef[-γ1en+tanhet+γ2tanhef]+

(57)
(43)式和(51)式代入(57)式并化简,得

β2tanhTentanhen-β3tanhTenen-

γ1tanhTefen-γ2tanhTeftanhef-
(58)
根据性质1和(24)式,得到


γ1λm‖p‖2+ρ(‖xρ‖)‖xρ‖‖p‖+
‖tanhet‖‖en‖+γ1‖tanhef‖‖en‖,
(59)
式中:λm为任意正常数。
根据Young不等式,则得到
(60)
式中:γa、γb为正常数。
4.2 稳定性验证



(61)

5 仿真验证与实车验证
5.1 仿真验证
为验证本文所提自动驾驶履带车辆轨迹跟踪控制方法的有效性,分别进行仿真验证和实车验证,仿真验证时的自动驾驶履带车辆参数如表1所示。

表1 自动驾驶履带车辆仿真参数
在仿真中,给定自动驾驶履带车辆期望轨迹设置为
xd=10cost,
yd=10sint.

图2(a)~图2(d)为本文所提自动驾驶履带车辆轨迹跟踪控制方法性能与传统PID控制方法性能的对比结果。图2中,xe为车辆X轴方向的误差,ye为车辆Y轴方向的误差,θe为车辆角度误差。从图2(a)中可知,相比传统PID控制方法,本文所提方法能够在非线性不确定性和外界干扰下依然可以精确跟踪期望轨迹,同时由图2(b)~图2(d)可知,本文所提方法的轨迹跟踪误差能够快速收敛到0的邻域内,且轨迹跟踪误差xe、ye均小于0.2 m,由此可见本文所提方法具有较高精度的轨迹跟踪效果。

图2 自动驾驶履带车辆本文方法和PID控制方法轨迹跟踪控制仿真对比结果
5.2 实车验证
为验证所提方法具有可用性,在双侧独立电驱动自动驾驶履带车辆平台上对所提方法进行实车验证。实车验证平台如图3所示。

图3 双侧独立电驱动自动驾驶履带车辆平台
双侧电机驱动自动驾驶履带车辆平台通过两个电机分别驱动两侧主动轮,运动控制单元通过调节电机的转矩,使两侧主动轮受控于期望的状态下。当两主动轮转速相同时,车辆进行直驶,当两侧主动轮形成转速差时,车辆进行转向。整车结构如图4所示,自主控制单元接收根据自主决策系统规划的期望路径,并进行在线实时解析,形成运动控制命令,并通过CAN总线传递给电机控制器执行,最后由电机实现受控的转矩输出。

图4 自动驾驶履带车辆平台控制系统
实验环境如图5所示。

图5 实验环境
5.3 实车实验结果
实车实验预设了直线工况与曲线工况两种期望轨迹,进而控制车辆跟踪期望轨迹。
5.3.1 直线工况
在上述实验环境中,自动驾驶履带车辆分别以5 m/s的速度沿直线行驶,不涉及转向。同样采用PID控制方法与本文所提方法进行对比,对比实验结果如图6(a)与图6(b)所示。

图6 直线工况自动驾驶履带车辆轨迹跟踪实验结果
图6中:图6(a)为直线工况下所提自动驾驶履带车辆的轨迹跟踪控制性能对比,可见在图5所示实验环境中,本文所提方法相比PID控制方法,能够控制履带车辆精确跟踪期望轨迹,具有较好的跟踪效果;图6(b)为自动驾驶履带车辆轨迹跟踪误差,可见轨迹跟踪误差渐进趋向于0 m的邻域内,且具有较小控制误差。以上结果表明本文所提基于误差符号鲁棒积分的自动驾驶履带车辆轨迹跟踪控制方法在直线工况下具有较高的跟踪精度,同时能够抑制各种模型不确定性及外界干扰的影响。
5.3.2 曲线工况
曲线工况的期望轨迹定义如下:
则曲线工况下自动驾驶履带车辆的轨迹跟踪实车实验结果如图7所示。其中:图7(a)为在曲线工况下的轨迹跟踪控制性能,图7(b)与图7(c)为轨迹跟踪误差。由图7(a)与图7(c)可知,本文所提方法可以在曲线工况下实现对期望轨迹的渐进稳定跟踪,同时使得跟踪误差保持在0.2 m范围内。

图7 曲线工况下实车实验结果
综上所述,通过实车实验论证了本文所提方法的有效性,表明该方法可以在保持高精度轨迹跟踪的同时对系统不确定性及外界随机干扰具有强鲁棒性。
6 结论
1)本文针对复杂野外环境下的自动驾驶履带车辆轨迹跟踪控制问题,提出基于误差符号鲁棒积分的轨迹跟踪控制方法,建立自动驾驶履带车辆的运动学与动力学耦合模型,解决了基于解耦控制结构的轨迹跟踪控制方法模型耦合作用难以实现精确控制的问题。
2)采用自适应控制方法实现对未建模动态、参数误差等模型不确定性的在线前馈补偿,同时结合误差符号鲁棒积分控制实现对外界干扰的反馈抑制,并基于李雅普诺夫稳定性理论证明了所提方法的渐进稳定性。
3)通过仿真与实车验证,证明了所提方法在未建模动态、参数不确定性及外界随机强干扰条件下,具有较高的轨迹跟踪控制精度和强鲁棒性。
