太阳翼驱动机构机电耦合建模及微振动控制稳定性分析
2021-07-28郑照明月
郑照明月 程 伟
北京航空航天大学 航空科学与工程学院,北京 100191
0 引 言
随着新一代航天器对能量需求的不断提高,卫星太阳翼的尺寸越来越大。但由于其阻尼弱、刚度低,对卫星姿态控制系统和太阳翼驱动机构(SADA)的稳定性提出了更高的要求[1-2]。由于步进电机具有定位精度高,无累计误差,驱动线路简单等优点[3],以往SADA采用步进电机作为执行机构。但步进电机固有的脉冲激励,使SADA驱动太阳翼过程不断产生微振动,影响卫星稳定度。目前SADA采用永磁同步电机作为驱动装置,并通过微步驱动方法来驱动太阳翼[4]。永磁同步电机采用三环控制方法,控制参数选取不当易导致太阳翼转动失稳,同时在轨环境不存在空气阻力,太阳翼的低频结构振动难以衰减,并且会通过SADA与航天器本体发生耦合振动,影响有效载荷的成像精度[5],甚至会导致卫星姿态失稳的故障[6]。因此需分析永磁同步电机SADA驱动柔性太阳翼的动力学模型,确定控制参数的选取方法,为航天器在轨稳定运行提供支撑。
太阳翼驱动系统包括执行机构和柔性太阳翼两个主要结构部件,其中柔性太阳翼旋转运动会导致刚体运动和柔性耦合,并且执行机构与柔性太阳翼直接的相互作用使系统具备机电耦合特点,所以对系统的建模和稳定性分析具有一定的复杂性。Iwata等[7]在研究中将太阳翼简化为刚性体,主要分析了执行机构的控制环节。Zhang等[8]将SADA简化为刚性连接,研究了柔性太阳翼的振动抑制。张恒浩等[9]给出了一种针对挠性航天器的刚柔耦合动力学模型控制方法。张可墨等[10]在考虑电流环摩擦力矩的基础上建立了永磁同步电机为驱动源的SADA模型,研究了其驱动刚性负载的微振动问题。上述研究中均简化了执行机构或负载柔性,不能准确反映两者的耦合关系。
而在考虑机电耦合特点的建模及稳定性分析中,多以步进电机为驱动源,永磁同步电机驱动柔性太阳翼的分析较少。Zhu等[11]将步进电机SADA与太阳翼考虑成相互耦合的整体系统,给出了步进电机SADA与太阳翼机电一体化耦合模型。Chen等[12]通过简化和线性化电磁转矩,建立了步进电机的振动方程,并以两自由度柔性系统开展了仿真分析。Mariyam[13]根据拉格朗日能量法建立了步进电机SADA与刚性负载运动学和微振动耦合的动力学模型,在压电测力台上开展了仿真和实验。程俊波等[14]以永磁同步电机SADA为对象,建立了驱动柔性负载的控制模型,给出了一种T-S模糊控制与校正网络相结合的控制方法。
为此,本文建立了一种SADA驱动柔性太阳翼的模型,给出了系统的三环微步驱动方法,并讨论了控制参数的稳定条件。
1 SADA驱动柔性太阳翼模型
1.1 使用微步驱动方法的永磁同步电机模型
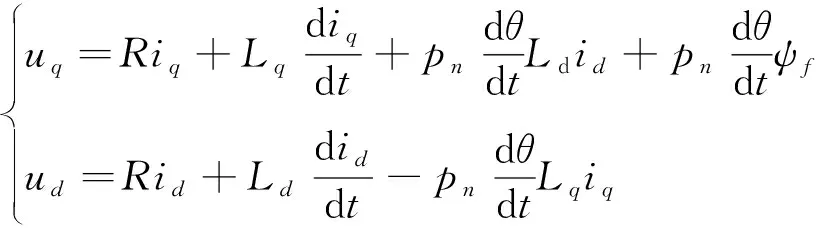
如图1所示,使用同步旋转坐标系(d-q轴)来描述永磁同步电机的数学模型,d轴定义为永磁同步电机永磁体N极的指向,也称转子直轴,q轴定义为沿逆时针方向超前d轴90°电角度,也称转子交轴。永磁同步电机的定子电压方程为:
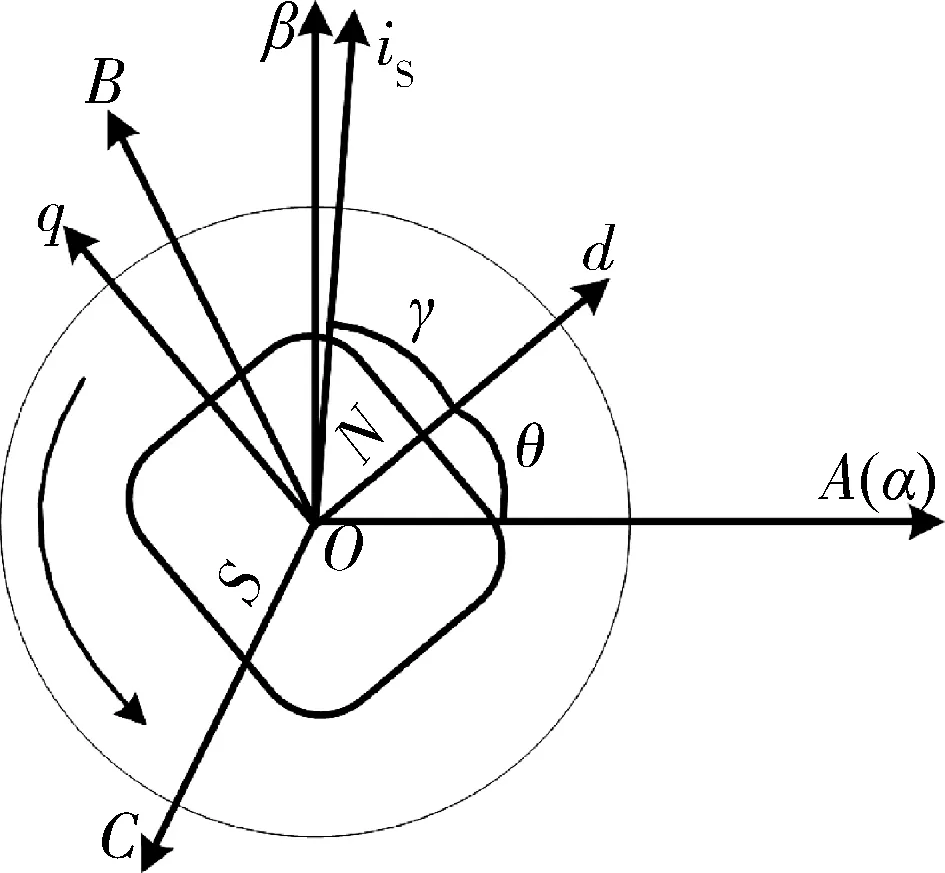
图1 永磁同步电机坐标系
(1)
磁链方程:
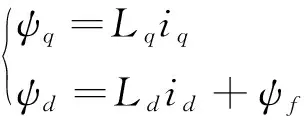
(2)
电磁转矩方程:
(3)
运动方程为:
(4)
式中:uq和ud分别为d轴和q轴的电压,id和iq为d轴和q轴的电流,Ld和Lq为d轴和q轴电感,R为三相定子电阻,ψf为转子磁链,θ为转子轴线与A轴夹角,pn为极对数,ψd和ψq分别为d轴和q轴的磁链。在运动方程中,b0为粘性阻尼系数。
将定子电流矢量is进行d和q轴分解,电流的d轴和q轴分量分别表示为:
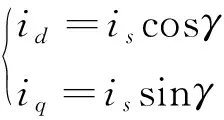
(5)
式中:γ为定子电流矢量与转子直轴的夹角。将式(5)代入式(3),可得
(6)
采用id=0的矢量控制策略,定子电流矢量与转子直轴的夹角为90(,此时,电磁转矩可表达为:
(7)
式中:极对数pn和永磁体产生的磁链ψf均为定值,因此转矩和q轴电流具有线性关系。因此,可通过控制定子电流矢量与转子直轴的夹角γ,以实现永磁同步电机的定位和调速。
在初始定位过程中,记录θ0为转子的初始位置,给定定子电流矢量与转子直轴的夹角为90°,定子电流矢量的幅值为定值Is,可给出如下控制信号依次控制电机的定位和按照一定速率ωr匀速转动:
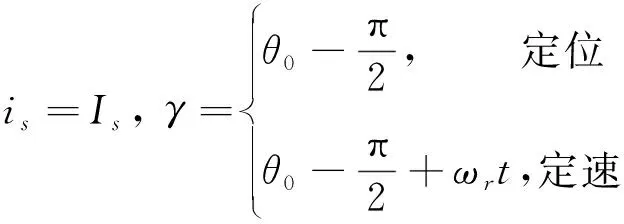
(8)
采用数字化控制的永磁同步电机,其定子电流矢量产生的磁场是离散的多边形磁场,定义相邻离散定子电流矢量的夹角为微步角θm,均匀改变定子电流矢量的时间间隔为dT,则微步角可描述为:
θm=ωdT=pnωrdT
(9)
此时,永磁同步电机的对转子的驱动可视为类似于步进电机的微步驱动方式,同时随着均匀改变定子电流矢量的时间间隔越小,即控制频率越高,控制连续性越好。
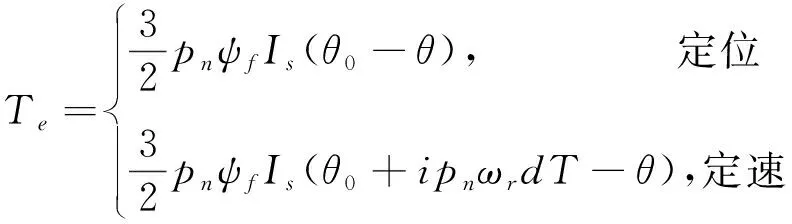
将式(8)给出的控制策略代入式(7),可以得到PMSM微步驱动时的电机转矩的方程为:
(10)
式中:θ指转子当前的机械角位置,i表示微步的序号。该方程第一行表明永磁同步电机的转矩具有使转子位置回归初始位置的复位能力,即实现了电机的定位功能。而第二行则说明在给定转速时,电机转矩将驱动转子按给定转速微步转动,即实现了调速功能。
微步角的物理含义是,永磁同步电机在定位和驱动时,两个连续电脉冲信号之间,转子当前的角位置总位于一个微步角以内,即:
-θm<θ0-θ<θm
-θm<θ0+ipnωrdT-θ<θm
(11)
卫星在轨运行时,SADA大部分时间以较低转速驱动太阳翼,微步角很小,因此式(10)可线性化为:
(12)
将式(12)代入运动方程式(4),经整理可得简化后的微步驱动永磁同步电机的动力学方程为:
(13)
(14)
1.2 SADA驱动柔性太阳翼模型
为了缩减柔性太阳翼有限元模型的自由度,提高控制仿真效率,采用动态子结构方法,将永磁同步电机驱动柔性太阳翼的耦合系统分为2个子结构:子结构1为永磁同步电机,子结构2为柔性太阳翼。如图2所示,A点为太阳翼与永磁同步电机的连接点。它只有绕Y轴转动的自由度θ,激励只有绕Y轴的转矩Tl。
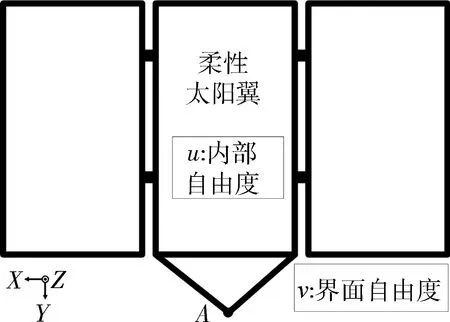
图2 柔性负载模型
(15)

根据固定界面模态综合法,子结构的假设模态集由主模态和约束模态构成,子结构2的主模态和约束模态的求解方法为:
(16)
(17)
定义p为柔性太阳翼的模态矩阵对应的模态坐标列向量,其与位移列向量的变换关系为:
(18)
根据第二行可知,最后一个模态坐标pθ与物理坐标θ相等,说明无论是在模态坐标中还是物理坐标中,两者均代表了界面节点A绕Y轴的扭转,具备相同的物理含义。所以,后续推导中均用θ表示此扭转自由度。结合简化后的永磁同步电机的动力学方程(13),可得SADA驱动柔性太阳翼的动力学方程:
(19)
式中:pl的物理含义为柔性太阳翼保留的前l阶模态坐标,θ表示界面节点A绕Y轴的扭转自由度,故经变换后的耦合结构动力学方程仅有l+1阶,相比于有限元模型的上千阶的物理坐标自由度而言,大大降低了动力学方程的自由度,为后续控制仿真提供了基础。
为了便于控制仿真,引入下述坐标变换:
(20)
将SADA驱动柔性太阳翼的动力学方程改写为状态空间方程的形式:
(21)
式中:
(22)
为了保证系统的稳定性,PMSM采用三环控制策略,根据永磁同步电机模型,可将三环控制方程表示为:
(23)
e1=θ0-θ
(24)
(25)
(26)

(27)
式中:KPP为位置环的比例控制参数;KVP和KVI分别为速度环的PI控制参数;KCP和KCI为电流环的PI控制参数。永磁同步电机安装在刚性界面时,输出力矩的反作用力即为耦合系统产生的微振动力矩。
2 控制器稳定性分析
在引入PI调节器抵消电流环的大惯性环节后,电流环开环频率特性的截止频率将远高于速度环的截止频率,即电流环对永磁同步电机驱动太阳翼的角位移、角速度稳定性影响较小。因此,在分析角位移、角速度稳定性时,将电流环做降阶处理,即电流环的传递函数简化为1。为了分析转矩和角速度之间的传递关系,暂不考虑结构阻尼和外部干扰的影响,即α=β=0和Fu=0,Tr=0,对式(19)按行展开,进行拉普拉斯变换,可得:
(28)
整理得到角速度和转矩之间的开环传递函数GV:
(29)

(30)
由式(30)可知,在柔性负载的各阶模态中,扭转分量较大的模态(对应耦合系数xi为较大值)对角速度控制稳定性有影响,而无扭转分量的模态(对应耦合系数xi为0)对控制稳定性影响不大。假设柔性负载具有m阶具备扭转分量的模态,则角速度和转矩之间的开环传递函数GV有m对共轭零点,其对应频率为ωi;存在m+1对共轭极点,对应的频率为耦合系统的固有频率,在这些耦合系统固有频率下可能发生微振动。速度环使用PI控制器,如图3所示。
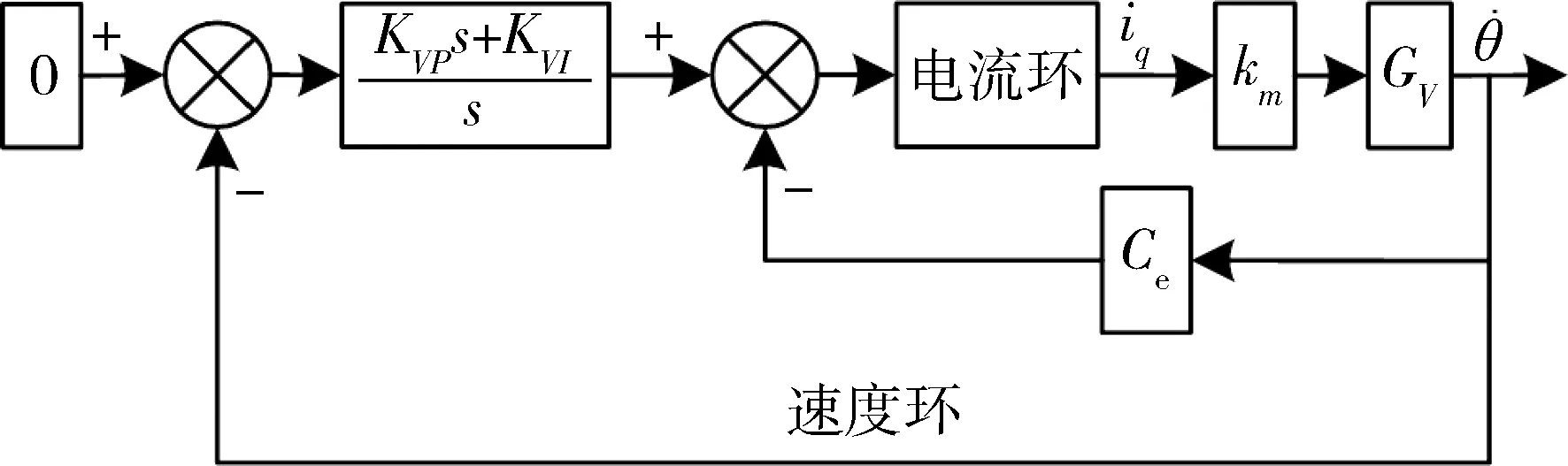
图3 速度环框图模型
根据林纳德-奇帕特判据,为保证系统处于稳定状态,速度环的控制参数KVI应满足以下条件:
(31)
控制参数将改变耦合系统的自然振动频率,因此需选取可抵消自然振动频率的控制参数。考虑鲁棒性和响应时间选取恰当的控制参数,绘制了角速度与转矩之间的传递函数和经PI控制器校正后的速度环开环系统、闭环系统的伯德图,如图4 所示。
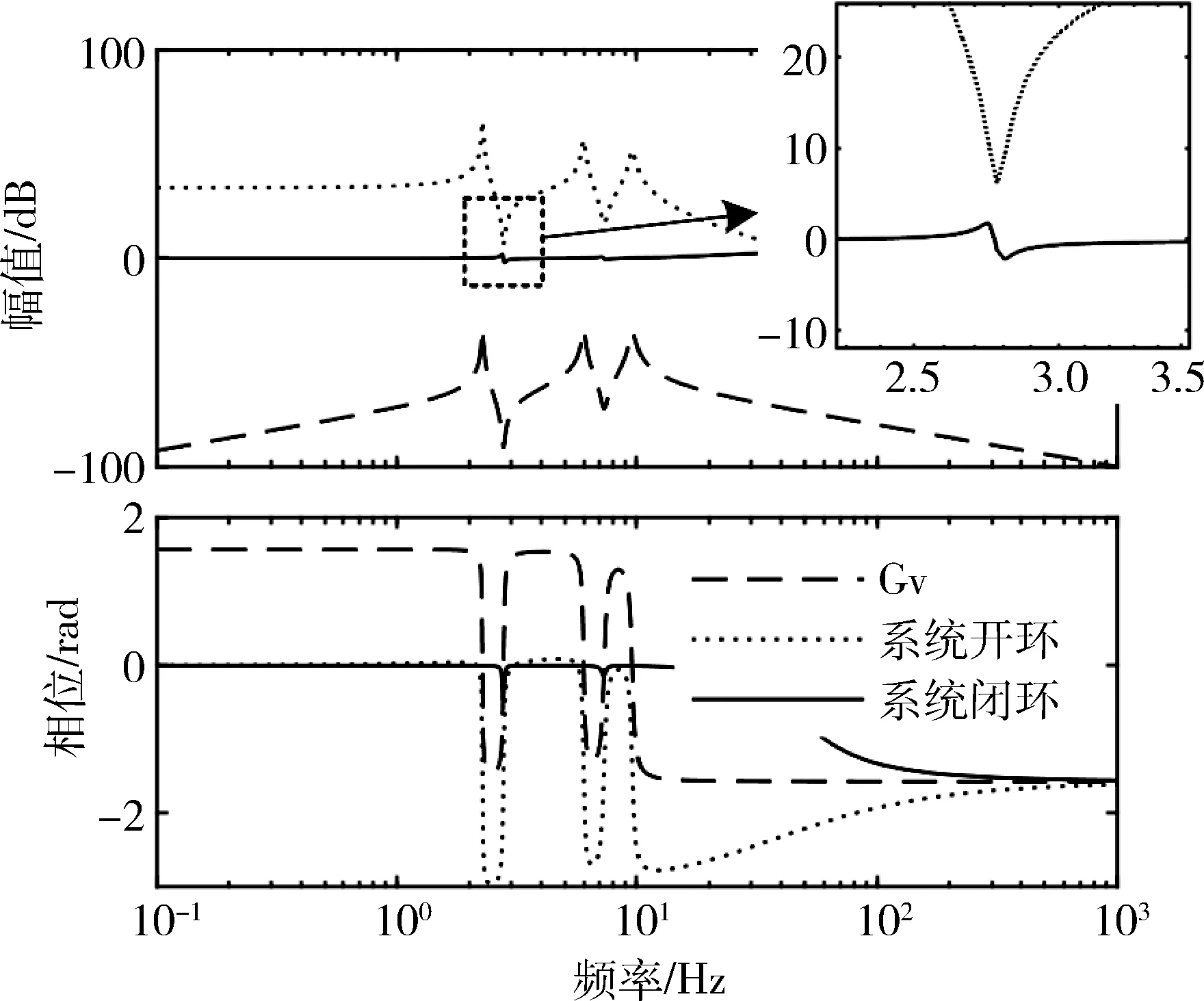
图4 伯德图:角速度与转矩的传递函数、速度环开环、速度环闭环
开环传递函数在柔性负载与扭转相关模态对应频率2.78Hz和7.29Hz处各存在一个零点,在2个频率附近存在3个极点。以消除幅频曲线的3个极点导致的振荡频率为目标,选取合适的控制参数。校正后,闭环系统消除了自然振动频率,相稳定裕度大于60°。由闭环系统的幅频曲线可知,转矩仍可能在一阶扭转频率附近的2.73Hz处产生微振动。若控制参数选取不满足式(31),则导致开环系统的幅频曲线在一阶扭转频率2.78Hz处穿越,此时系统出现相位失稳。
3 仿真分析
通过数值仿真可以验证上文提出的控制参数确定方法的有效性。为准确模拟SADA驱动太阳翼的力学过程,为工程实践提供依据,设计了一种与真实太阳翼具备相似力学特征的对称结构柔性模拟负载。使用商用软件Abaqus建立了柔性负载的有限元模型,从柔性负载的有限元模型中提取了质量矩阵和刚度矩阵,并根据式(15)至式(22)所述缩聚过程,经计算得到柔性负载的状态空间方程。再根据式(23)至式(27),使用商用软件Matlab中的Simulink模块,建立了永磁同步电动机驱动柔性负载的仿真模型,如图5所示。表1给出了仿真参数。

表1 仿真参数
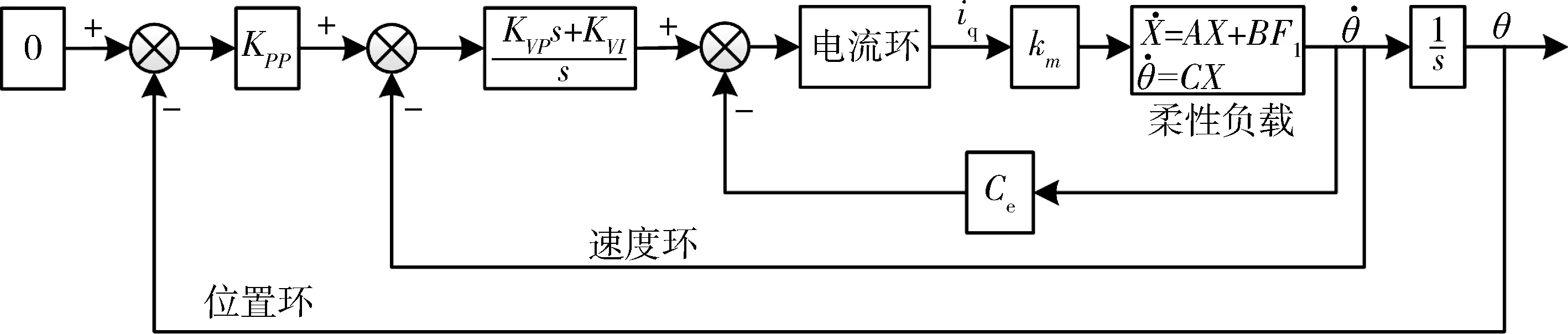
图5 SADA驱动柔性负载模型
图6给出了在2种不同速度环的控制参数下,永磁同步电机SADA驱动柔性负载的微振动仿真结果。根据仿真结果可以得到2个结论: 1)2种工况下耦合系统微振动均发生在2.688Hz,与图4 中闭环系统bode图预测的振动频率2.73Hz仅相差1.48%,说明仿真模型与理论分析基本一致;2)比较2种工况下系统产生的微振动量级可知,当控制参数选取不当时,即不满足式(31)给出判据时,耦合系统产生的微振动将提高一个数量级,这对卫星而言是非常不利的。

图6 SADA驱动柔性负载仿真频域曲线
4 实验验证
设计了如图7所示实验,验证永磁同步电机SADA驱动柔性太阳翼的模型,并验证控制参数确定方法的有效性。使用微振动测力台可获取耦合结构产生的微振动[15]。

图7 SADA驱动柔性负载实验
图8给出了在2种不同速度环的控制参数下,永磁同步电机SADA驱动柔性负载产生微振动的频域实验结果。频域曲线的结果表明,2种工况下耦合系统的微振动发生在2.688Hz,与图6中给出的仿真结果一致,而实验与仿真在2.688Hz的微振动峰值误差小于9.7%。再结合图9给出的微振动的仿真与实验的时域结果对比可知,仿真与实验的微振动时域结果基本吻合,所以仿真模型能准确输出耦合系统产生的微振动。比较2种工况下微振动量级可知,当控制参数选取不当时,耦合系统产生的微振动提高了一个数量级,验证了式(31)给出的控制参数稳定性判据的准确性,说明给出的控制参数确定方法是有效的。
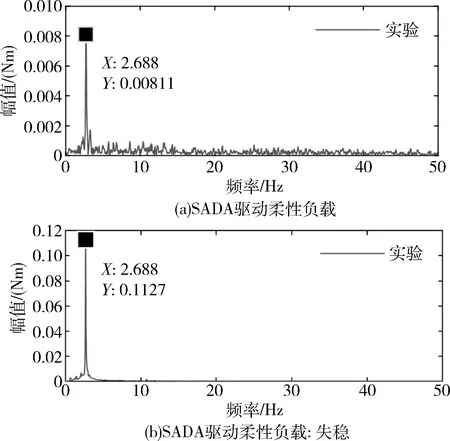
图8 SADA驱动柔性负载实验频域曲线
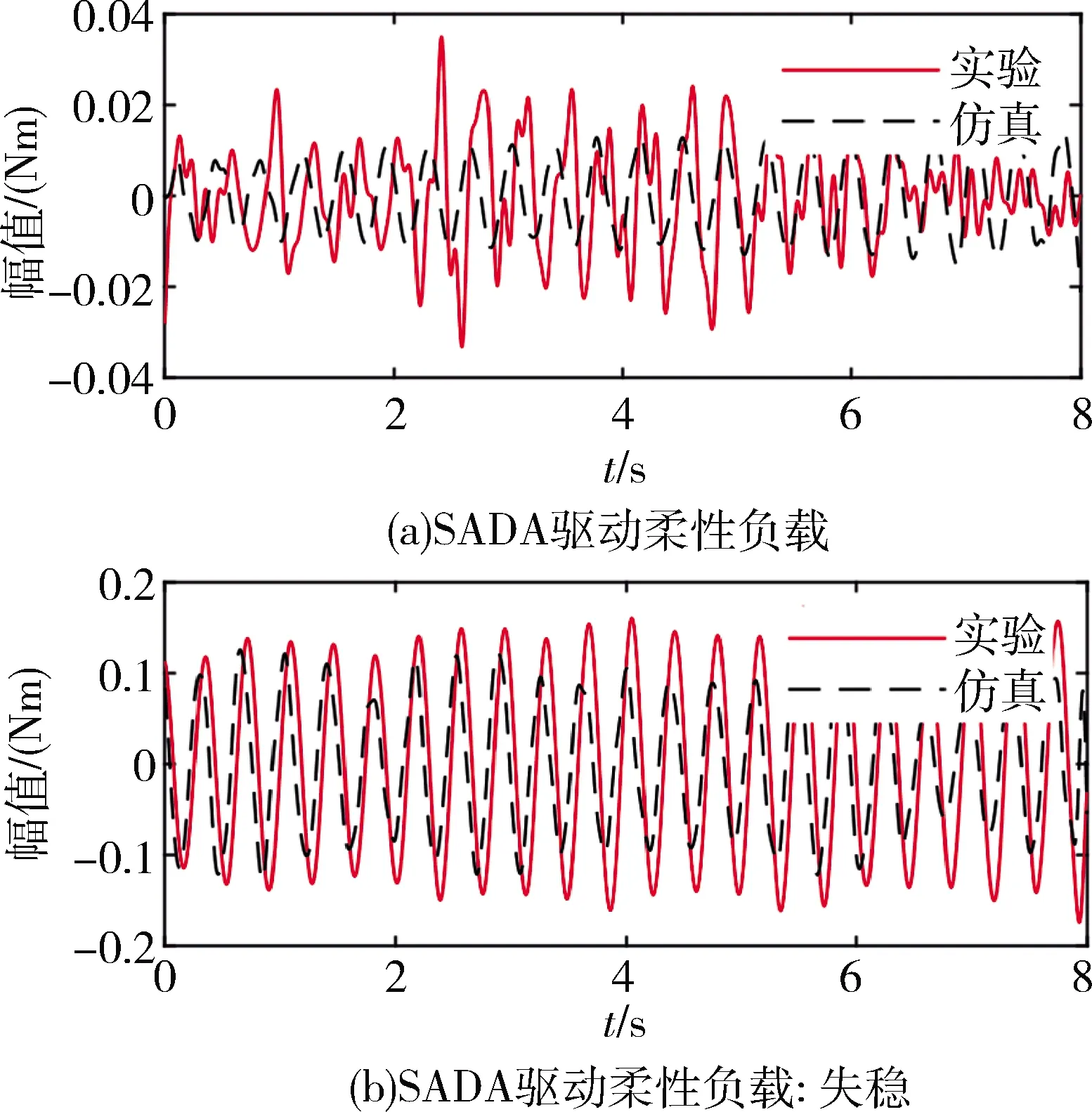
图9 SADA驱动柔性负载时域曲线
5 结论
建立了SADA驱动柔性太阳翼的模型,给出了系统的三环微步驱动方法和控制参数的稳定条件。仿真和实验结果表明:所建模型能准确模拟耦合结构的微振动,控制参数的稳定条件有效可行。以上结果可应用于遥感卫星太阳翼驱动机构的在轨控制参数调节,为提高遥感卫星图像质量和振动抑制提供了有力的支撑。
