基于滑模PI控制的卡尔曼滤波在空间转台的应用
2021-07-28方智毅
叶 青 李 雪 冯 宇 李 宇 方智毅
上海宇航系统工程研究所,上海 201109
0 引言
永磁同步电机(permanent magnetic synchronous motor, 简称PMSM)因其功率密度高、体积小、功率因数高和优越的动态响应速度[1-2],近年来被越来越广泛地应用于空间二维转台负载的驱动控制。由PMSM驱动的空间二维转台的超低速控制是一个新的研究领域。目前,空间二维转台负载对PMSM驱动系统最低转速要求可能达到0.05(°)/s左右,对控制精度的要求也相应地越来越高。超低速PMSM系统是强耦合、非线性的,如果将传统的PI控制+T法测速方法直接用于二维转台的超低速控制,则可能出现如下3个问题:1) T法测速的估计误差较大导致速度跟踪误差较大,达不到要求的精度;2) 超低速工况下的摩擦力矩呈非线性,电缆力矩与角度成正比,传统的PI控制难以消除这两个干扰力矩的影响;3) 负载和电机的物理系数(主要是力矩系数和转动惯量)的时变性导致:根据某一组系数确定的比例、积分系数不适用于所有的工况,传统的PI控制缺乏自适应性。
国内外学者在解决PMSM低速高精度控制问题上做了很多研究[3-5],在观测器设计和滑模控制算法的应用方面有以下研究成果。文献[6]采用插值的方法增加观测器采样周期之间的采样点,提高了观测精度。文献[7]采用了卡尔曼滤波的方法获取更优的低速工况的转速。文献[8]采用了高频注入法,在低速控制时代替机械式位置传感器来获取速度角度信息。文献[9]设计模糊PI 滑模观测器提高系统的快速性和稳定性。文献[10]通过扩展卡尔曼滤波(简称EKF)实现磁链、转子位置和速度的精确估计,提高了直接转矩控制的性能。文献[11]设计的EKF观测器,把光电码盘信号的量化误差考虑为测量噪声,提升了转子位置、速度的观测精度。文献[12]利用EKF对电机的电阻、电感参数进行识别,有效地改善了PMSM控制性能。文献[13]设计分数阶滑模变结构控制器,来提升系统的动态、稳态性能和鲁棒性。文献[14]采用模糊PID技术与滑模观测器的新型混合估计策略,进一步提高了系统转子位置和电机转速的观测精度。文献[15]在直接转矩控制中运用变指数趋近律滑模变结构控制策略,有效地抑制了滑模变结构的抖振,并且改善了转矩和磁链的脉动过大的问题。文献[16]设计了一种积分型滑模变结构控制器,通过观测负载转矩并反馈到滑模控制器中,使系统具有响应快速、无超调等优点,且对负载的力矩扰动具有较强的鲁棒性。文献[17]提出了一种上下界滑模变结构速度控制器,将速度误差与系统状态量的变化相关联,通过预设负载转矩的上下界值,实时改进滑模控制律,有效地提高系统的静态、动态特性与鲁棒性。
由于卡尔曼滤波算法和滑模控制算法在工程上都有较强的实用性,因此可以考虑将二者结合起来,应用于空间二维转台的超低速控制。本文主要针对空间二维转台PMSM的速度环设计展开研究。针对二维转台超低速控制的应用场景,提出了一种基于滑模PI控制的卡尔曼滤波算法来改进传统的PI控制+T法测速方法。这一算法的优势体现在如下3个方面:1) 卡尔曼滤波算法将滑模PI控制的抖振看作是白噪声,再根据测量噪声的随机分布特性,提取出更准确的转速信息,提高控制精度;2) 将摩擦力矩和电缆力矩看作是低频干扰,消耗一定的控制力矩来消除低频干扰对转速控制性能的影响;3) 考虑了实际应用中力矩系数和转动惯量的时变性,用Lyapunov方法确定滑模PI控制律中的控制参数,使得闭环系统必然稳定。为验证基于滑模PI控制的卡尔曼滤波算法的可行性,本文设计了仿真试验,将该算法与传统的PI控制+T法测速方法进行了对比。
1 滑模PI控制算法理论分析
本节假定系统状态可以准确测量,只讨论滑模PI控制律的设计方法,状态估计方法的讨论在下一节中展开。本文中,电流环采用SVPWM算法[18]。在本节假定q轴电流[18]实际值与指令值总是相等的。
考虑某型二维空间转台PMSM速度环的被控系统模型
(1)
其中,t表示时间,J表示转动惯量,ω表示机械角速度,b表示力矩系数,iq表示q轴电流,df表示摩擦力矩的大小,dθ>0表示电缆力矩系数,θ表示机械角。假设时变参数满足:Jmin≤J(t)≤Jmax,bmin≤b(t)≤bmax,0≤df(t)≤dfmax。Jmax,bmin,dfmax,dθ>0已知,Jmin,bmax>0未知,这种参数给定在型号研制中常见。


根据式(1),关于z1,z2的系统模型方程可写成
(2)
设控制律
iq=u0+v
其中PI控制律u0为
u0=-Kiz1-Kpz2
其中,Ki>0为积分系数,Kp>0为比例系数,现需要确定滑模控制律v。
设

(3)
其中滑模变量
s:=z1+cz2+cωc,c=Kp/Ki
开关变量
σ1=1,当sω<0时,σ1=0,其他
σ2=1,当sθ<0时,σ2=0,其他
常增益ks>0为任意小的正常数。下面给出定理1。
证明:设第一个Lyapunov函数为
则对V1求导,再代入控制律(3),得到
所以当s≠0时,s在有限时间内收敛为0。当s=0时,再设第2个Lyapunov函数
所以如果在时刻t0时s(t0)=0,则在任意时刻t>t0,当t→∞时,
s(t)≡0⟹V2(t)→0⟹z1(t)→-cωc⟹z2(t)→0
所以闭环系统渐近稳定,证毕。
从式(3)中可见,滑模PI控制律需要已知的变量包括:θ,ω,Jmax,bmin,dfmax,dθ,dmax。其中:θ,ω需要用卡尔曼滤波算法进行估计;Jmax,bmin,dfmax,dθ是负载的固有物理量,可以经过事先实验测得;dmax取决于位置环的控制律,是已知的。
可以看出滑模PI算法有以下3个优点:1) 需要在线估计的物理量较少,有可操作性;2) 只需已知转动惯量上界和力矩系数下界,所以这一算法是通过施加强控制力来使系统稳定:只要增加控制力,就能提高鲁棒性;3) 传统PI控制律需要同时控制2个变量:跟踪误差和其积分,而滑模PI控制律只需控制一个变量s,这对于超低速工况是实用的。
2 卡尔曼滤波算法
本文提出的卡尔曼滤波算法参考了文献[19]的设计,但是在处理干扰力矩方面有所不同。
伺服系统的匀速运动离散化方程为
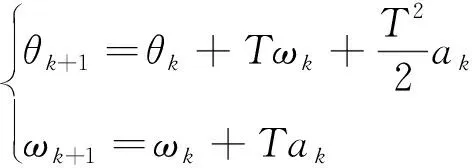
(4)
式中,下标k表示该变量为第k个采样周期的变量。基于(4)的卡尔曼滤波的过程及测量方程如下:
其中,X=[θ,ω]T为状态变量,a表示角加速度,z为角度测量值,w,v分别为过程噪声和测量噪声,A,B,C定义为:
卡尔曼滤波算法如下:
(5)

在算法(5)的实施中需要已知角加速度ak,电机匀速转动时ak约等于0,但是在仿真试验中可以发现如果令ak恒等于0,则滤波性能较差。根据式(1)可知,ak的准确值应为
其中,iqk为第k个周期的q轴电流值,可以在线测量,但是在实际工程中b(t),J(t),df(t)未必已知,且θk和ωk尚需要进行估计。因此本文中提出ak的估计方法为
这一估计方法与文献[19]不同,优点是:避免了控制与状态观测的耦合,信号的因果关系明确,易于工程实现。
3 基于滑模PI控制的卡尔曼滤波算法在空间转台超低速控制中的应用
在空间轨道运行的某型号高精度转台上的负载由PMSM拖动。PMSM的控制通常由外到内分为三环:位置环、速度环和电流环。一个典型的三环控制框图如图1所示。
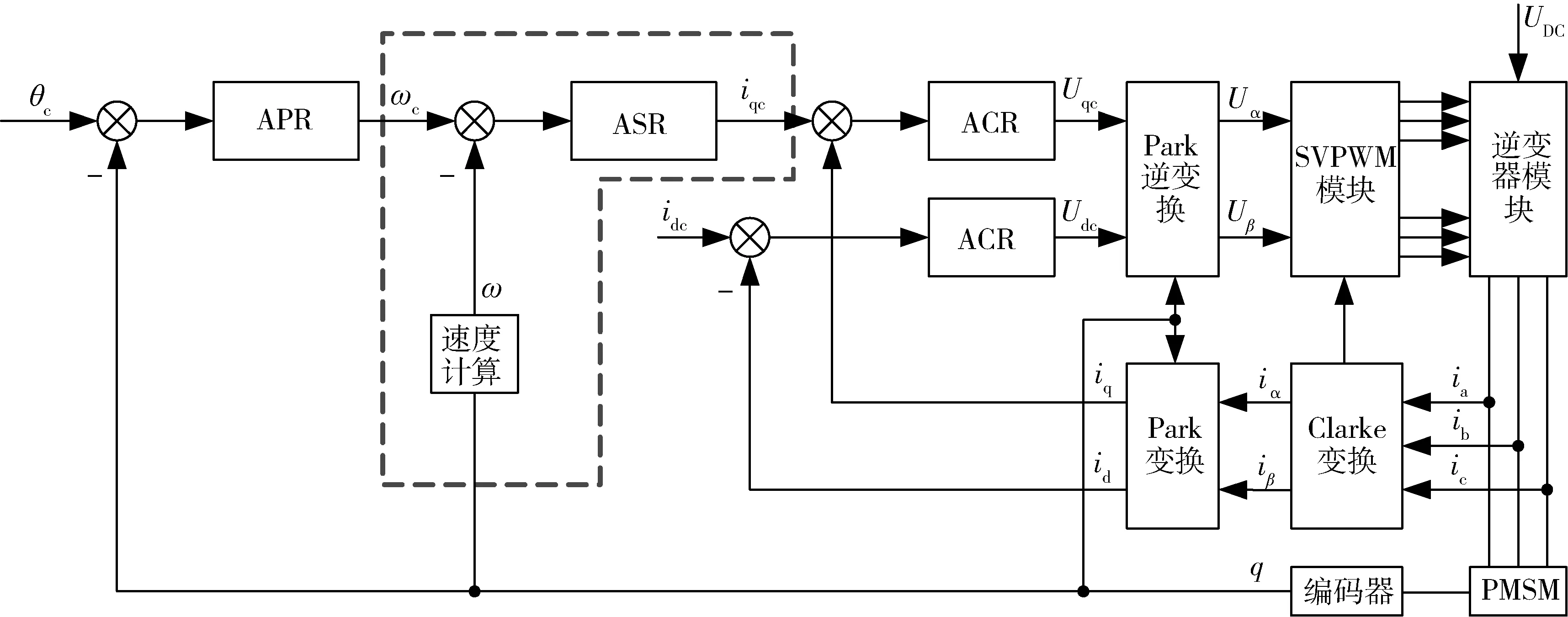
图1 PMSM的三环控制结构
图1中APR,ASR和ACR分别表示位置环、速度环和电流环控制律,本文提出的算法可以被用来改进绿色虚线框中的环节。在空间高精度二维转台的一些应用场景中,要求负载绕方位轴和俯仰轴缓慢地匀速转动,对一定范围的空间区域进行扫描。这一具体要求体现在PMSM系统中,可以抽象为:位置环输出恒定非零的速度环指令,要求PMSM转速以足够高的精度稳态精度可能要求达到0.01(°)/s跟踪恒定的速度环指令。当速度环指令很小(可能达到0.05(°)/s)时,会带来难以解决的控制问题,主要体现在如下3个方面:
1)电机转速过低时,无法用传感器直接测量速度,需要从角度信息中提取出速度信息;
2)摩擦力矩和电缆力矩在系统模型中呈现非线性,低速运行时,静摩擦力的影响不可忽视;
3)由于二维转台两轴间的耦合性,绕方位轴的转动惯量会有很大幅度的变化,可能影响控制性能。
本文提出了基于滑模PI控制的卡尔曼滤波算法来解决这3个问题。综合考虑第1节和第2节的算法,进行控制和状态估计一体化设计:在每时每刻利用前一采样时刻的估计值,用第2节的卡尔曼滤波算法求出当前时刻的估计值,然后将这一估计值代入到第1节的滑模PI控制律中求解电流环指令。这样得到的基于滑模PI控制的卡尔曼滤波算法如下:
2)根据算法(5)计算出Xk,Pk,令θk=Xk(1),ωk=Xk(2);
3)计算z2:=ωk-ωc,z1:=z1+Tz2;
4)计算PI控制输入和滑模控制输入:
u0k=-Kiz1-Kpz2
(6)
其中
σ1k=1,当sωk<0时,σ1k=0,其他
σ2k=1,当sθk<0时,σ2k=0,其他
5)输出电流环指令iqck=u0k+vk。
由于这一算法常用于转台的恒定转速控制,因此可以取定dmax=0。
基于滑模PI控制的卡尔曼滤波算法的控制框图如图2所示。
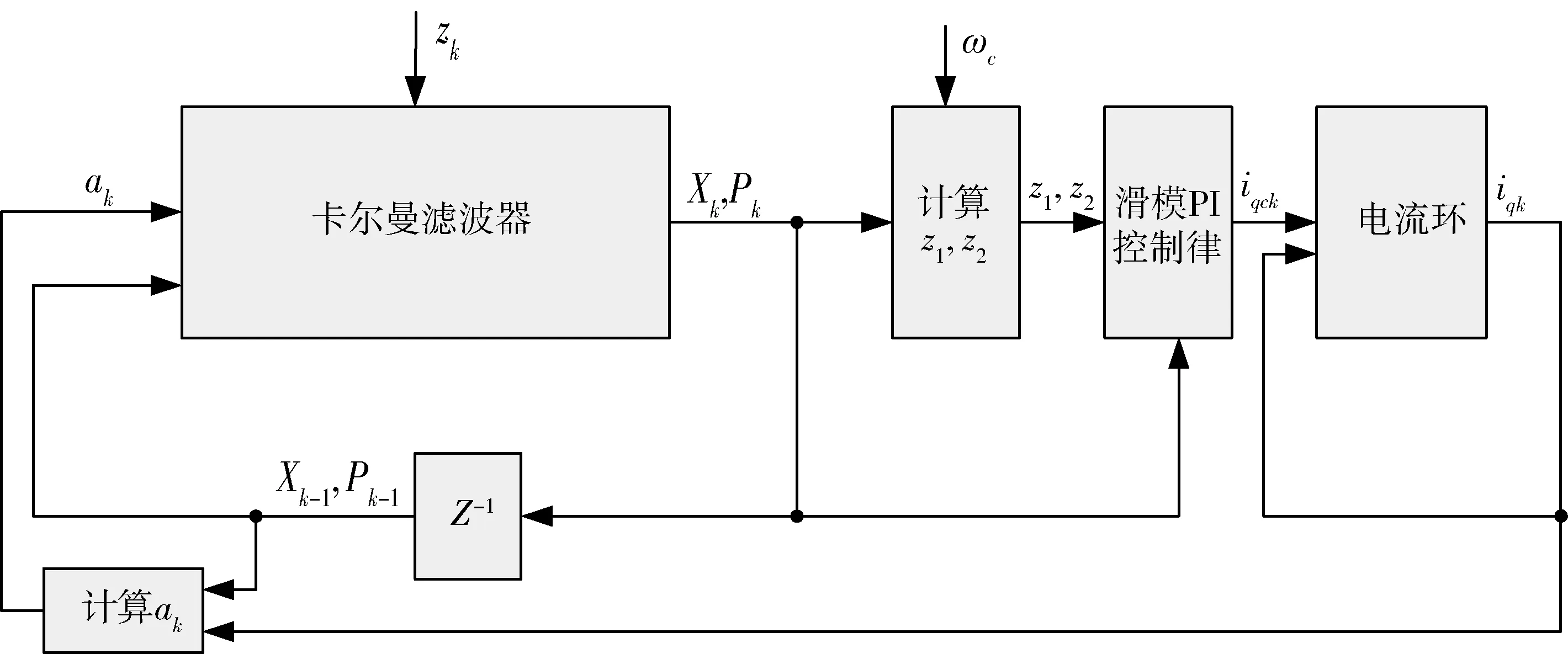
图2 控制框图
针对二维转台超低速控制面临的3个控制问题,基于滑模PI控制的卡尔曼滤波算法在以下3个方面予以解决:
1)卡尔曼滤波器的设计考虑了滑模控制固有的抖振现象,可以根据电流环输出和位置环输出估计出较为准确的角速度,根据文献[20]的定理2.10可知,卡尔曼滤波器能够实现无偏估计。
2)由定理1的证明可知,滑模控制算法以尽可能大的控制力使滑模变量收敛为0,使得摩擦力矩和电缆力矩对滑模变量的收敛速度没有影响,进而对速度跟踪误差的收敛性没有影响。
3)由式(3)可见,滑模PI控制律不需要已知当前的转动惯量大小,只需已知转动惯量的最大值,再由定理1的证明可知转动惯量的变化对系统稳定性没有影响,对滑模变量的收敛速度也没有影响。
4 仿真校验
根据某型二维转台负载和电机型号确定模型参数,其中J≤12kg·m2,b≥7N·m/A,转动惯量时变,按照图1搭建Simulink仿真模型,用基于滑模PI控制的卡尔曼滤波算法改进速度环。现给定角度测量干扰的标准差为0.001°,要求速度跟踪的稳态跟踪误差在0.01(°)/s以下。
首先给出超低速工况(速度跟踪指令为0.05(°)/s)下的仿真结果,与传统的PI控制+T法测速方法进行了对比,如图3所示。

图3 超低速工况下的仿真曲线
由图3可见,卡尔曼滤波算法保证在超低速工况下速度估计误差始终在0.006(°)/s以下,如图3(c)所示。同时从图3(c)中可见T法测速的估计误差远远大于卡尔曼滤波的估计误差,这会引起控制性能的下降。滑模PI控制算法保证了速度跟踪性能良好,如图3(a)所示。由图3(d)可见q轴电流始终在0.2A内变化。由图3(b)可见,基于滑模PI控制的卡尔曼滤波算法保证速度跟踪的稳态误差在0.005(°)/s以下,满足控制精度要求,而传统方法不能满足设计要求。
由图3(b)可见本文提出的算法并不能保证跟踪误差在0(°)/s左右变动,这是因为卡尔曼滤波器对速度估计始终有一个正的偏差,如图3(c)所示。这可能是卡尔曼滤波算法中对干扰的估计不精确引起的。更多的仿真试验结果表明,随着速度指令的提高,速度估计的偏差逐渐减小,直到不明显。而速度跟踪精度与速度指令基本无关,始终能够保持跟踪精度小于0.01(°)/s。在不同速度指令下,本文提出的算法与PI控制+T法测速方法的控制精度对比如图4所示。
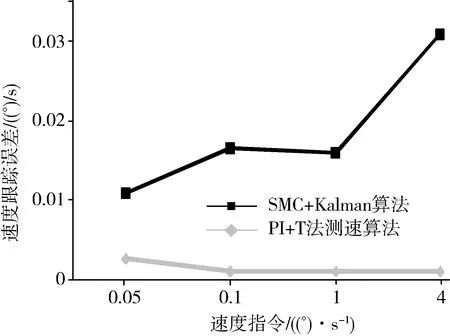
图4 不同速度指令下跟踪精度对比
从图4可见,本文提出的算法在速度指令提高时精度更高,而传统方法正好相反。这是因为T法测速在速度指令提高时,差分运算时会引入更大的噪声。
下面给出速度指令阶跃变化工况下的速度响应,速度指令为0.05(°)/s→0.25(°)/s→0.15(°)/s。仿真结果如图5所示。
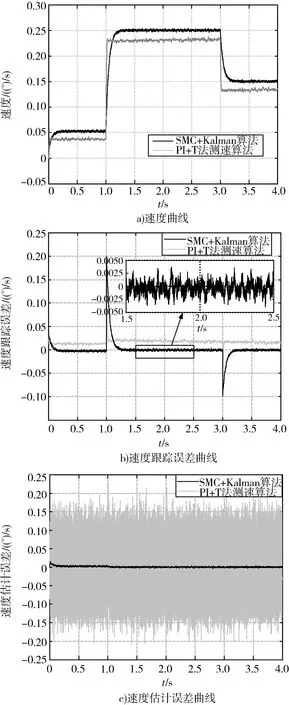
图5 阶梯速度指令下的仿真曲线
仿真结果表明卡尔曼滤波的速度估计误差始终在0.004(°)/s以下,如图5(c)所示。同时滑模控制算法保证了速度跟踪性能良好,速度动态接近一阶惯性环节,如图5(a)所示。由图5(b)可见,速度跟踪的稳态误差在0.004(°)/s以下,满足控制精度要求。
5 结论
提出了一种基于滑模PI控制的卡尔曼滤波算法,用于空间高精度二维转台上PMSM的低速控制。这种算法改进了传统的PI控制+T法测速方法,有以下3个优点:1)卡尔曼滤波算法能够更准确地估计较低的转速,提高控制精度;2) 能够克服非线性干扰力矩引起的低频干扰;3) 对模型不确定性具有足够强的鲁棒性。仿真试验结果表明,当PMSM运行于低速区域时,本文提出的算法对环境噪声有足够强的鲁棒性,能够保证闭环系统的速度跟踪性能良好;在超低速工况下,本文算法保证速度跟踪精度较PI控制+T法测速更优,且速度估计误差远低于PI控制+T法测速。
