基于分层极化特性的箔条云识别方法
2021-07-27李永祯刘业民黄大通
李永祯, 刘业民, 庞 晨, 黄大通
(国防科技大学电子科学学院, 湖南 长沙 410073)
0 引 言
将合成孔径雷达(synthetic aperture radar, SAR)技术应用于射频制导(即SAR导引头),一方面可有效提高其全天候、全天时的探测能力,另一方面可在复杂战场环境下提升对目标的定位精度和识别概率。因此,SAR导引头在精确制导领域得到了广泛的关注和研究[1-3]。虽然SAR导引头具有诸多优点,但也有其自身难以克服的缺点,即易受战场电磁环境的影响[1]。箔条作为电子战中典型的无源干扰手段,在空中分布取向复杂且运动扩散形式多变,具有不确定性,其雷达特性相当复杂,在SAR导引头图像中表现为若干个强散射点组成的二维目标,与需打击的雷达目标难以区分真假,加之箔条制造工艺简单且廉价,故箔条在现代海战场中仍然得到了广泛的应用[1]。因此,新型SAR导引头如何对抗箔条干扰是目前急需解决的前沿问题,具有非常重要的军事意义。
目前公开报道的抗箔条干扰方法主要是针对传统的雷达导引头(如宽带相参雷达导引头[4-10]、脉冲多普勒雷达导引头[11]、单脉冲雷达导引头[12-13]等),对SAR导引头抗箔条干扰方法鲜见报道,若将这些传统的抗箔条干扰方法直接应用于SAR导引头,其抗干扰效果也许会失效。因此,需要针对新型SAR导引头研究出抗箔条干扰的新手段和新措施。
根据空气动力学原理,释放在空中的箔条由于自身重力、空气阻力等原因会缓慢下降和扩散,箔条丝的不同取向会直接影响其下降速度。具体来讲,垂直取向的箔条下降速度最快,水平取向的箔条下降速度最慢,其他取向的箔条下降速度介于两者之间[14]。此外,根据箔条的极化散射特性,水平取向的箔条水平极化回波最强,垂直取向的箔条水平极化回波最弱。因此,随着扩散时间的推移,箔条云内部的箔条丝在高度维会按着箔条丝的取向不同呈现出分层现象,而舰船目标通常不具备这种极化分层特性。
基于以上问题和背景,本文从箔条云的极化特性和空气动力学特性入手,提出了一种基于分层极化特性的箔条干扰识别方法。论文共分为4部分:首先阐述了单根箔条的极化散射特性;在此基础上,分析了箔条云的分层极化特性;然后借鉴干涉SAR(interferometric SAR, InSAR)的干涉原理获得箔条云和舰船目标的分层回波,根据两者分层回波强度的变化规律,提出了一种箔条识别特征量;最后进行了仿真实验,为了验证本文所提方法的鲁棒性,仿真实验中考虑了3类典型箔条云的分布以及船只目标的不同姿态。仿真实验结果表明本文所提方法能够很好地识别出箔条干扰。
1 单根箔条的极化散射特性
图1给出了单根箔条的极化散射特性示意图,箔条的中心位于xyz坐标系的原点o,假设箔条的方向矢量为c,xoy平面与水平面平行,θc和φc分别是箔条的天顶角和方位角。为了描述箔条的后向散射电场特性,建立一个新的坐标系ehever,其中eh和ev是在(h,v)极化基下后向散射电场的正交单位矢量,下标h和v分别表示水平极化和垂直极化,er是后向散射电场方向的单位矢量,γs是单位矢量er和正z方向之间的夹角。
图1 单根箔条的散射示意图
根据文献[15]所述,箔条的轴线方向即为箔条的极化方向。因此,若用全极化雷达从水平方向观测箔条时,其水平取向箔条的水平极化波最强,而垂直取向箔条的水平极化波最弱。在实际应用中,由于作战需要,其雷达导引头的观测方向通常不会是水平方向(即γs≠90°),而是存在着一个俯仰角。根据雷达极化基的定义,其水平极化基eh通常定义为平行于水平面,其与雷达的观测方向无关[15]。因此,可以使用箔条云的水平极化回波来分析箔条云的极化分层特性。
不失一般性,例如当γs=45°时,若用全极化雷达观测单根箔条,可得到不同极化下箔条雷达散射截面积(radar cross section, RCS)随天顶角θc和水平面方位角φc的变化关系,如图2所示。通过研究表明,水平极化通道箔条的RCS强度不随γs变化,即与雷达的观测方向无关,而γs的变化会直接影响垂直和交叉极化通道中箔条的RCS强度。因此,箔条的水平极化回波强度可应用于箔条云的极化分层特性。
图2 不同极化下单根箔条RCS随天顶角θc和水平面方位角φc的变化关系(γs=45°)
2 箔条云的分层极化特性
在单根箔条的极化散射特性基础上,考虑箔条云的分层极化特性。箔条云的扩散模型采用文献[14]所提模型,该扩散模型是基于美国空军航空电子实验室研究成果[16]基础上提出来的,考虑了空气阻力、箔条弯曲变形等因素对箔条云扩散的影响。文献[14]研究表明,箔条扩散的运动学特性表现为垂直取向的箔条下降速度最快,水平取向的箔条下降速度最慢,其他取向的箔条下降速度介于两者之间。根据箔条这种动力学特性,随着扩散时间的推移,箔条云充分扩散后其垂直取向的箔条在箔条云的底层,水平取向的箔条在箔条云的顶层,箔条云的中间部分主要由水平取向和垂直取向之间的箔条丝组成,且扩散时间越长,这种分层效果越明显。根据前面分析可知,与之相对应的分层效果是箔条云在高度维的极化分层特性,即随着箔条云高度的递增,箔条云的水平极化波强度越强。下面用仿真实验验证箔条云这一极化特性。
假设箔条云扩散前(t=0时刻)有20 000箔条分布在一个边长为10 m的正方体内,其初始中心位置的坐标为(0 m, 0 m, 55 m),扩散仿真实验的具体设计过程请参考文献[16]。当t=60 s时,假如在箔条云扩散后高度维的中点处有一部全极化雷达观测箔条云的扩散,然后将观测到的箔条云在高度上平分成若干层,并计算出每一层箔条云极化回波的RCS强度。按着这种做法,图3给出了文献[17]中3类典型分布箔条云的分层极化特性。其中,图3(b)中θ0为情况2的分布参数,该参数为天顶角的分布上限;θg和σ为图3(c)情况3的分布参数,分别表示该分布情况下(即正态分布)的均值与方差。在图3中,设定观测方向角γs=45°,每种情况下箔条云的分层数量为10层,图3中水平、垂直和交叉极化通道中箔条云的RCS强度各自进行了归一化处理。从图3中容易看出,交叉和垂直极化通道中箔条云的RCS强度没有明显规律可循,而水平极化通道中箔条云的RSC强度随着高度的递增而递增,仿真结果验证了前面理论分析的正确性。下面接着分析利用箔条云这种特有的分层极化特性来实现箔条干扰的识别。
图3 3类典型分布箔条云的分层极化特性(γs=45°)
3 基于干涉原理的箔条分层处理及箔条干扰识别算法
3.1 基于干涉原理的箔条分层处理
根据箔条云分层处理的要求,需要获取到舰船目标和箔条云的高程信息。因此,本文利用InSAR的干涉原理获得两者的高程信息,然后在高度维对其进行分层处理。由于舰船目标通常无法满足箔条云这种特有的极化分层特性。因此,基于此特性差异,可望实现对箔条干扰的识别。
InSAR系统通常在垂直航迹面上放置两部天线,利用两天线间的干涉相位信息获取目标的高程信息[18]。在反舰应用中,随着天线技术和电子技术的发展与进步,相控阵天线已广泛应用于雷达导引头中,为获取目标的高程信息,本文将相控阵天线在垂直航迹面上划分两个子天线,其工作原理如图4所示。不失一般性,若子天线A1为主天线,负责发射雷达信号,其与地面的高度为H;子天线A2为辅天线,其与主天线的间距为B;设天线A1和A2到目标P的瞬时斜距分别为Rm(ta)和Rs(ta),且目标P的高程为h,其中ta为慢时间;在图4中可以看出,面A1A2P与水平面的交线为A1D,设α为基线A1A2与A1D的夹角,斜距差ΔR=Rm(ta)-Rs(ta),则ΔR与主辅图像真实干涉相位Δφ的关系可表示为[18]
图4 干涉原理示意图
ΔR=-λΔφ/2π
(1)
设β为基线A1A2与A1P之间的夹角,则在三角形A1A2P中,由余弦定理可求得角度β为
(2)
设θ为A1o与A1P之间的夹角,由于点A1、A2、P和o共面,则有
θ=π/2+α-β
(3)
因此,目标点P的高程为
h=H-Rm(ta)cosθ=
(4)

根据InSAR的工作原理,雷达导引头获取目标高程的流程如图5所示,其具体实现步骤可参考文献[18-19]。
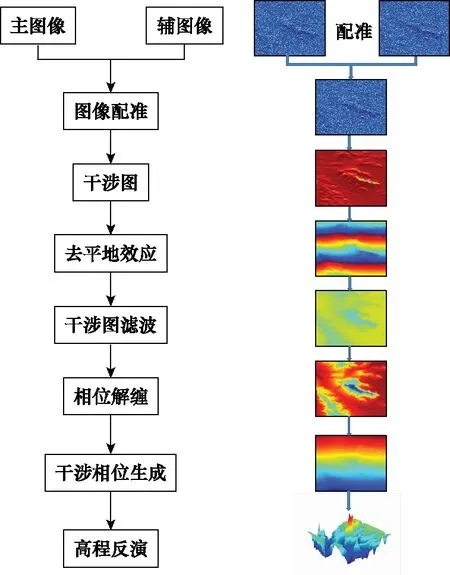
图5 雷达导引头获取目标高程流程图
3.2 箔条干扰识别特征量
在应用中,若箔条云和舰船目标的高程信息已经获得,则根据第2节所述,分别对箔条云和舰船目标进行分层处理,然后分别计算两者每层中水平极化回波RCS的强度,从而可得到舰船目标(或箔条云)RCS强度序列矢量P=[P(1),P(2),…,P(N)],其中,P(i)(i=1,2,…,N)为第i层舰船目标(或箔条云)的RCS强度,N为舰船目标(或箔条云)的分层数。根据前面的分析,箔条云的RCS强度,理论上可满足以下关系:P(1) 通过分析,本文可设计如下箔条干扰识别量。 步骤1将RCS强度序列矢量P值分为两部分: (5) 步骤2求矢量P的平均RSC强度,记为E(P),其中符号E(·)为取平均操作符。令矢量序列(E(P)-Pf)中大于0的元素个数为Num1,序列(Pb-E(P))中大于0的元素个数为Num2,根据箔条云特有的极化分层特性,可设计识别特征量ρ如下: (6) 该识别特征量可以很好地反映出箔条云特有的极化分层特性。具体来说,箔条云充分扩散后且高程信息反演无误差的理想情况下,其ρ的理论值为1,在非理想情况下,其ρ小于1且接近1;另一方面,舰船目标通常不具备这种极化分层特性,因此其ρ值的随机性较大,若将舰船目标分为无限多层,其ρ值在理论上约为0.5。为此,可设定如下判决门限Th: (7) 最后,讨论一下本文所提方法的适用范围。如前所述,本文所提方法主要是利用具备SAR功能的雷达导引头对抗箔条冲淡干扰。因此,本文所提方法需要满足以下几个条件:①需要具备SAR导引头功能,且具有提取目标高程的能力;②仅限于抗箔条冲淡干扰情形,对于舰船目标“包裹”在箔条云情形,或者单脉冲跟踪阶段形成箔条质心干扰时的情形,本文所提方法将会失效;③需要箔条云充分扩散,扩散越充分其干扰识别性能越好;④当箔条云落在水面上,由于缺乏了高程信息,本文所提方法将会失效。因此,在实际应用中,根据雷达导引头的实时性要求、箔条云的扩散程度、极化方式以及对抗场景等情况,可将本文所提方法与其他方法结合使用,以提高箔条干扰的识别率。 在仿真实验中,雷达导引头的主要仿真参数设定如表1所示,SAR导引头发射线性调频信号,极化方式为水平极化,工作模式为前斜视成像模式。 表1 SAR导引头系统仿真参数 图6给出了雷达导引头与箔条云的几何关系,其中z为箔条云高度,Rm(ta)为SAR导引头主天线与箔条云的瞬间斜距。仿真中,假设在t=0时刻,20 000根箔条分布在一个边长为10 m的正方体内,其中心位置坐标为(8 000 m, 8 000 m, 55 m),主、辅通道箔条云的SAR成像处理流程可参考文献[16]。 图6 SAR导引头对箔条云成像的几何关系 箔条云扩散60 s后,图7给出了情况1下箔条云的分层处理结果,其中图7(a)~图7(f)分别给出了获取箔条云高程具体步骤的仿真结果;本文所提方法的箔条云分层结果和理论分层结果如图7(g)所示,其中箔条云等高度共分成10层,理论分层结果是通过直接计算观测到的扩散后箔条云的RCS强度获得。从图7(h)容易看出,理论分层结果随着箔条云高度的递增而递增,其递增情况比较理想。虽然本文所提方法的分层结果是波动上升的,但分层曲线较好地反映了箔条云特有的分层极化特性。 图7 基于干涉原理的箔条云分层处理结果(情况1) 类似于图7的处理流程,箔条云在情况2和情况3下的分层处理结果如图8所示。图8中给出了箔条云在情况2和情况3下配准主图像的成像图以及分层极化处理结果图。从图8中可以明显看出,在不同的分布条件下,本文所提方法的箔条分层结果总体上亦是单调递增的,均能很好地反映箔条云特有的分层极化特性。这说明了箔条云的分层极化特性受箔条分布类型影响很小,分层极化特性稳定。 图8 箔条云分层处理结果(情况2和情况3) 另一方面,为了计算出船只目标的极化散射数据,图9给出了船只目标的空间坐标系示意图,其空间坐标系与箔条云的坐标系相同,图中的角度γs和φs分别为船只目标的俯仰角和方位角。在该坐标系下,本文采用CST STUDIO SUITE软件获取船只目标的极化散射数据。 图9 船只目标的空间坐标系示意图 在CST STUDIO SUITE软件中,为了获取船只目标的高程信息,需要获得主、辅图像的极化散射数据。为此,仿真中设定两组不同的观测视角,其中主图像的观测视角设定为γs=45°,辅图像的观测视角设定为γs=45.02°。另外,为获取多组散射主、辅图像的极化散射数据,固定角度γs,方位角变动,即φs分别取30°、45°和60°。船只目标的成像结果如图10(a)、图10(c)、图10(e)和图10(g)所示。与图7相同的处理流程,图10(b)、图10(d)、图10(f)和图10(h)给出了船只目标的分层极化处理结果。从图10中可以得出如下结论:船只目标的分层极化特性没有明显的规律可循,其随机性比较大,这与船只目标的材质、结构、雷达观测视角等因素有关。 图10 船只目标分层处理结果 根据第3.2节给出的箔条干扰识别算法以及图7和图8,表2给出了箔条云的识别特征量ρ的计算结果。类似于前面的箔条云分层处理情况,表3和表4给出了箔条云扩散时间分别为45 s和30 s情况下识别特征量ρ的计算结果。同理,根据图10,表5给出了船只目标的识别特征量ρ的计算结果。从表2~表5中可以看出,箔条云扩散后的分层极化特性,其识别特征量ρ一般远大于0.5,即使在扩散时间30 s的情形下,箔条云的识别特征量ρ也大于等于0.7,远比舰船目标的大。此外,考虑到由于箔条云的扩散不充分,箔条云的高度反演不完全准确等因素,文中可设定门限Th=0.6,若ρ≥0.6,则判定为箔条干扰,反之则为舰船目标。值得指出的是,门限Th可在实际应用中去检验和修正。 表2 箔条云的识别特征量ρ计算结果(60 s) 表3 箔条云的识别特征量ρ计算结果(45 s) 表4 箔条云的识别特征量ρ计算结果(30 s) 表5 船只目标的识别特征量ρ计算结果 从箔条云的极化特性和空气动力学特性入手,本文提出了一种基于分层极化特性的箔条干扰识别方法,主要用于解决SAR导引头抗箔条冲淡干扰的问题。利用InSAR的干涉原理对箔条云和舰船目标进行分层处理,根据两者的分层极化特征差异,提出了一种箔条识别特征量。为了验证该特征量识别箔条干扰的可行性,本文考虑了3类典型分布的箔条云以及不同方位角下观测的船只目标,做了大量的仿真实验。理论分析和仿真实验均表明,本文所提方法可以有效地识别箔条干扰。 值得指出的是,为了进一步提高箔条干扰的识别率,在实际应用中,可将本文所提方法与其他箔条识别方法结合起来,如支持向量机、神经网络等分类方法,这将是下一步需要深入研究的内容。

4 仿真实验与结果分析







5 结 论
