鱼类群体运动的元胞自动机模型中的最小势能原理
2021-07-25陆兴远袁卫锋
陆兴远 袁卫锋
群体运动是自然界中一种常见的生物行为.在过去的几十年中,研究人员已经对鸟群、兽群、鱼群和细菌菌落等不同的社会有机体的群体现象进行了广泛的研究[1−5].众多研究表明,某些规律对生物的群体行为起到关键作用.其中,“靠近被排斥,远离被吸引”的规则对群体的分散、聚合和避免个体间碰撞以及躲避天敌攻击有重要作用[6−8];流体力学和动力学原理也影响着群体的运动状态.例如,Dai 等研究发现,鱼类群体在运动中通过队形来塑造能减小阻力的流场,使得个体耗能最小[9].
生物的群体运动是一种个体间协同相互作用的结果,群体中个体的信息传递对群体运动状态起到重要作用[10].Gueron 和Couzin 等研究发现,群体信息在群体间是通过逐层传递的,个体的行为决策会受到相邻个体的影响[11−12].群体中个体间交互协同的思想为智能机器人集群的自动控制提供了理论基础.例如,Li 等受到生物系统的启发,发明了群体颗粒机器人.虽然每个个体的运动是单一随机的运动,但通过整个群体的协同,机器人群体可以朝着指定的激励源方向移动[13],雷斌受生物群体行为启发.应用仿生方法研究群体机器人的编队控制,目标搜索,实现群体机器人间的协同控制[14].
在之前的研究中,研究人员大多在二维的假设条件下对群体运动进行研究,鲜有在三维的条件下研究群体运动,这与真实的群体状态不符,并且之前的研究者提出的模型大多比较复杂.本研究构建了一个基于元胞自动机方法和最小势能原理的简洁三维模型,并通过数值模拟研究势能在鱼类群体中运动决策和个体间相互协同的作用以及对鱼群在有限空间中形成旋转运动状态的群体机制的影响.
1 模型
元胞自动机是一种个体状态由其邻近个体状态决定的算法[15].该方法已经被应用于流体力学,人流疏散等复杂场景的研究中[16−17].Pattanayak 等通过类元胞自动机方法的自航个体模型(Self-propelled particles)对群体运动的状态转换进行研究[18].本研究假定鱼群的运动模式受势能的支配,相应提出了鱼类个体运动的势函数并将之融合到元胞自动机中,建立了一种简洁的三维模型以模拟鱼群的运动.在真实鱼类群体中,个体会以一定的速度游动,且速度不是恒定不变的.本研究假设模拟的虚拟鱼个体以随机的速度运动.虚拟鱼的速度v定义为:v=v+α·Δv,其中α是[−1,1]的随机数.在本研究建立的元胞自动机模型中,以半径为v的球面上的点作为个体下一时间步可选择的位置,如图1 所示.个体将会选择势能最小的位置作为下一时间步的位置.本模型中每个位置的势能均与个体的邻居相关.
视觉是动物的共性,其对生物的群体行为和个体决策有着重要的影响.视觉影响个体感知周围环境,是个体获取信息的重要方式.研究表明,环境变化、邻居数量和邻居行为等都会影响个体行为决策[19].Ballerini 等研究发现个体在群体中与其他个体交流时并不是与整个群体交流,而是与其中的6~7 个邻居交流[20].本研究假设个体的视觉为有限且不变的常值.如图1 所示,Ri为个体的视觉距离;以θi为圆锥半角的圆锥体区域为个体的视角范围,圆锥体以外的区域为个体的盲区.在本模型中,个体只会把在其视觉范围之内距离其最近的N个邻居作为参考邻居,而不是整个鱼群.个体在选择参考邻居时,如果视觉范围内个体总数大于最大参考邻居数N,就会以距离其最近的N个邻居作为参考个体.
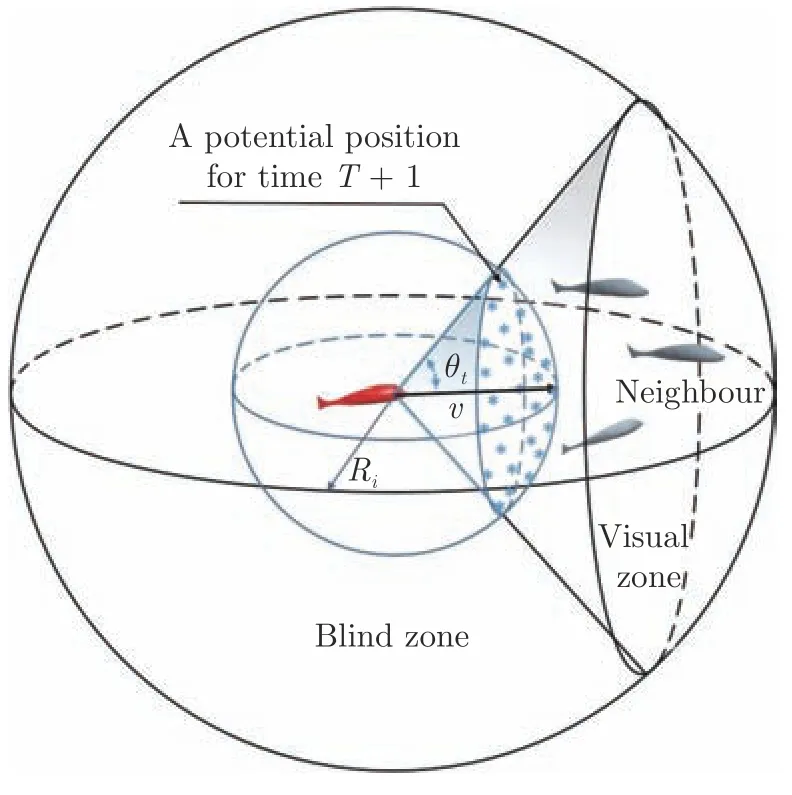
图1 鱼的模型Fig.1 Model of fish
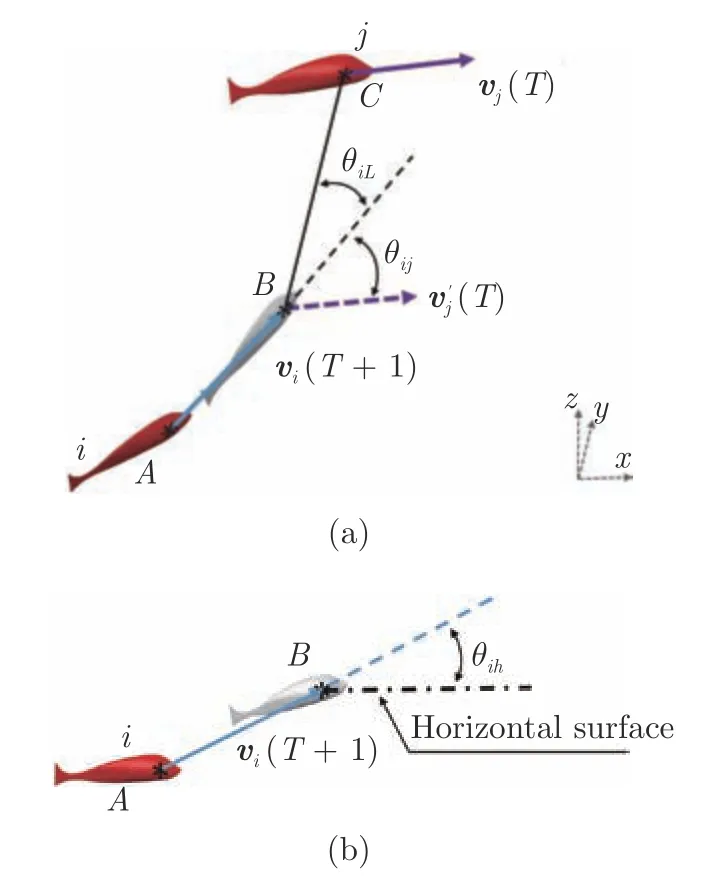
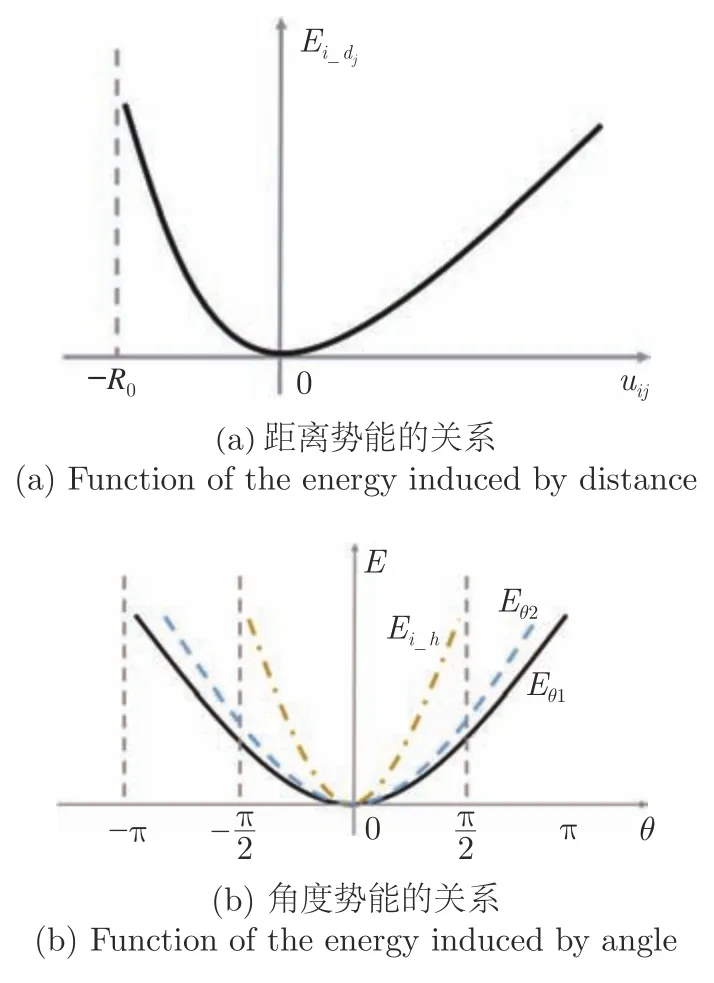
研究人员发现个体在群体中会因为相互间距离太近而相互排斥;如果个体间的距离太远,个体间又会相互吸引.个体间存在相对稳定的距离[6−8,21].本模型中,假设个体i和参考邻居j相互之间存在一个最佳距离R0,在这个位置上,个体i的距离势能最小.当个体间距离小于R0时,个体间距离越小,个体间相互排斥越强烈;相反,当个体间距离大于R0时,随着距离的增大,个体间的相互吸引程度增强,关系如式(2)和图3 (a)所示.

式(1)中,N为个体i的参考邻居数量.

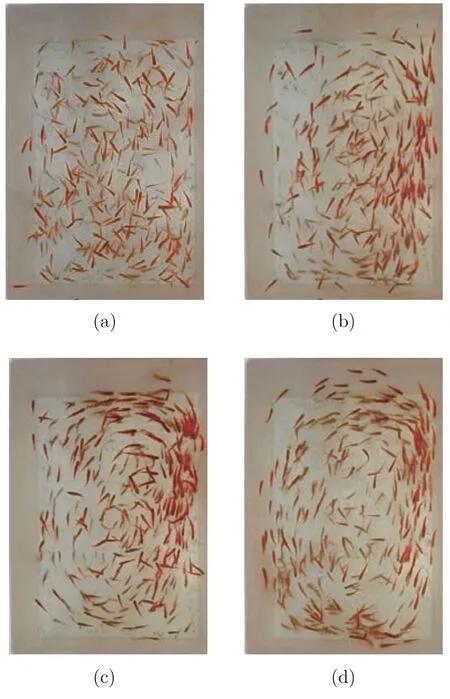
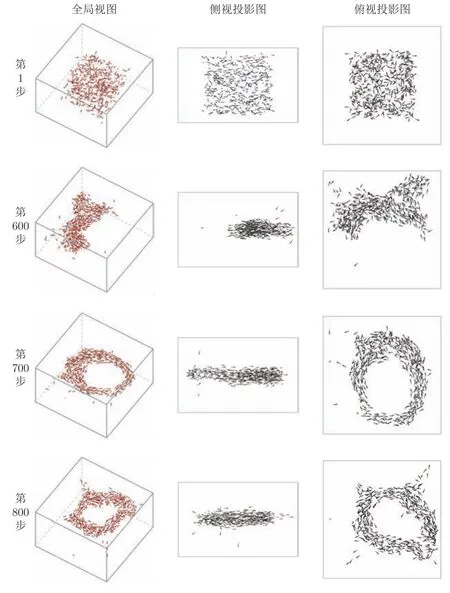
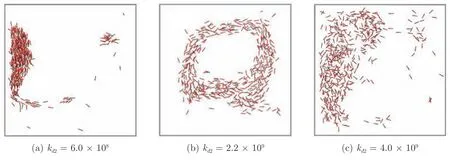
式(2)中,H代表(Heviside)阶跃函数;uij=dij −R0,R0为常数.kd1 式(3)、(4)中,kh、kθ1、kθ2、均为系数,θih表示个体i下一时间步的速度vi(T+1)矢量与水平面的夹角;θij表示个体i下一时间步的速度vi(T+1)和参考邻居j当前时间步的速度vj(T)的矢量夹角;θiL表示个体i下一时间步的位置B和参考邻居j当前时间步的位置C的连线与个体i下一时间步的速度vi(T+1)的夹角.关系如图2 和图3 (b)所示.图2 (a)中为参考邻居j当前时间步的运动方向vj(T)的平移,与vi(T+1)相交.图2 (b)中点划线为vi(T+1)在水平面的投影. 图2 三维空间中虚拟鱼中的角度关系Fig.2 The angular relationship in the potential energy of the fish in three-dimension 图3 势能函数的定义Fig.3 Functions defined for potential 本文把时间离散为若干个时间步,并把虚拟鱼个体的下一时间步可能移动的空间范围划分为若干个位置点.虚拟鱼群在每个时间步中遵循相同的规则.本文定义元胞自动机的规则如下面5 个步骤. 1)假设当前时间步为T.虚拟鱼个体i确定视觉范围内所有的参考邻居和下一时间步所有可能的移动位置,如图1 所示; 2)计算下一时间步T+1 所有可能移动位置的势能,每个位置的势能关系均如式(1)~(4)所示; 3)比较步骤2)中所有位置的势能,确定势能最小的位置,并把该位置作为下一时间步T+1的位置; 4)使用规则1)~3)遍历虚拟鱼群中所有的个体; 5)更新所有个体的位置,并重复步骤1)~5). 本研究对有限空间中红斑马鱼群的运动状态进行研究,构建了一个长宽高分别为120 cm,70 cm,80 cm 的玻璃缸和一个38 cm,25 cm,20 cm 的箱体,并购置了360 条红斑马鱼,为了让鱼群适应实验室的环境,在实验室里饲养超过一个月,利用摄像机对红斑马鱼群的运动状态进行摄像记录.值得注意的是,试验用的大小水箱被放置在同一个实验室中,除尺寸外其它条件相同.环境的变化对鱼群是一种外来刺激,当把红斑马鱼群从大箱转移到小箱中,或者从小箱转移到大箱中时,鱼群都会出现转圈的现象.如图4 所示,当把鱼群从大箱体转移到小箱体中时,鱼群会出现有序的旋转运动状态.在实验中可以观察到,红斑马鱼群从无序的状态逐渐转变为有序的状态,最后整个群体形成有序的旋转运动状态.从整个过程来看,鱼群处于无序的混乱状态下,群体中出现个别个体发起有序的运动,然后加入有序运动的个体不断增多,群体运动状态从无序的混乱状态变为局部有序的带状运动状态.当大部分个体参与到有序的群体运动中时,带状的群体运动状态首尾相连,整个鱼群形成环状的旋转运动状态.有序群体状态开始时,带状的群体形态的前部个体数量较多,较为密集,而群体尾部个体数量较少,较为稀疏.当最终形成环状旋转群体状态时,整个群体中个体分布较为均匀. 图4 真实红斑马鱼群中的旋转群体状态Fig.4 Whirling state in real fish schools of red zebrafish 本研究对真实的红斑马鱼群观察发现,当鱼群从大的箱体转移到小的箱体中时,鱼群会形成旋涡状的群体形态.为了研究这种群体运动形成的机理,本文提出了一种鱼类个体运动的势函数,并基于最小势能原理和元胞自动机方法建立了一个三维模型,如式(1)~(3)所示,通过数值模拟与红斑马鱼群的运动形态对比,以验证模型的合理性. 本模型假设参考邻居j分别通过θiL、θij、uij影响个体i的位置、方向和相互之间的距离,并假设θih与个体i在深度方向上倾斜游动的角度相关.当相关系数处于适当的值时,模拟的虚拟鱼群最终会演化成为旋涡状的群体形态.模型中的各系数综合地影响虚拟鱼群的运动状态,只有当各系数处于合适的取值范围内时,模拟结果才会与观察现象较好地吻合.本文中,对长宽高分别为30a,30a,20a的方形箱体中的500 条体长为a的虚拟鱼进行数值模拟.当系数分别设置为kd1=4.0×105,kd2=2.2×109,kθ1=1.8×109,kθ2=9.0×109,kh=7.0×1010,R0=1.5a,且虚拟鱼群中所有个体的位置和运动方向的初始状态都随机设置时(如图5,第1 步),虚拟鱼群经过若干时间步的运动后,演化为旋转的群体形态,如图5 所示.从整个演化过程看,虚拟鱼群开始时处于随机无序状态,运动一段时间后群体中会形成局部有序的状态,然后参与到有序运动的个体逐渐增多,原来带状的群体形态逐渐变长,最后带状群体形态首尾相连形成环形的旋转运动形态,最终大部分个体参与到有序的旋转运动中,整个虚拟鱼群形成比较稳定的旋涡状群体运动状态.值得注意的是,最终的旋转运动状态并不是所有的个体一直参与其中,而是存在个别个体脱离群体,运动到群体外部,也存在个别个体在脱离群体后,重新加入到旋转的群体运动中.对比虚拟鱼群与真实的红斑马鱼群的旋转运动状态及其形成过程,表明了本模型的模拟现象与真实鱼群现象相符. 图5 数值模拟过程中旋转的群体状态Fig.5 Whirling state in numerical simulation 群体运动是个复杂的自然现象.仿真虽然可以总体上得到与观察相吻合的现象,但是在仿真中将个体的运动与实际观察进行定量比较是非常困难的[6],因此,本文通过对鱼类群体运动的定性分析阐明所提出的模型的合理性.必须说明的是,势能公式中权重系数的取值对鱼群运动的模拟结果具有的影响,只有当权重系数选取合适时,才能达到模拟结果和试验观察吻合的情况.例如,参数kd2在范围“8.0×108~3.0×109”区间时,数值模拟能够呈现鱼群转圈的现象,超出这个范围,鱼群运动很难出现稳定的旋转状态.如图6 所示,在同一个时刻(第730 时间步),当kd2处于较小的值时,群体出现过于密集的状态;而当kd2处于较大的值时,群体状态较为混乱无序;只有当kd2处于合适的范围内时,模拟的效果与观察到的现象比较吻合.另一方面,kd2参数取值区间跨越一个数量级,说明利用本文模型对鱼群定性研究时,模拟结果对参数的具体数值不敏感,这种稳定性有利于通过模拟获取鱼群运动的共有特性.在本文模型的基础上,不同的权重系数取值会导致模拟中出现更多的鱼群运动形态,从而有可能为群体运动研究提供新的关注点.从这个意义上讲,结合最小能量原理而建立的元胞自动机模型可以被看作一个描述鱼类群体运动的理论框架,而模型中具体参数的确定,需要更加广泛和深入的研究. 图6 kd2 取值不同时虚拟鱼群在第730 时间步的状态Fig.6 The status of fish schools at 730th time step subject to different kd2 values 本文对红斑马鱼群在有限空间中的运动形态进行研究,假设鱼群中每个个体在运动过程中总是试图保持自身的势能最小,相应提出了鱼类个体运动的势函数并将之融合到元胞自动机中以模拟鱼群的运动.本研究发现:1)参考邻居j分别通过θiL、θij、uij影响个体i的位置、方向和相互之间的距离;θih与个体i在深度方向上倾斜游动的角度相关.当相关系数处于适当的值时,虚拟鱼群最终可能演化成为旋转运动状态.2)参考邻居数量N的值与群体中个体数量有关,个体数量增多,参考邻居的个体数量也会增多.当参考邻居数量N在4~10 个个体之间时,鱼群均可能出现旋转运动状态.本研究实验观察到的现象与数值模拟现象具有较好的一致性,并且本模型具有较好的鲁棒性,二者证明了本模型能够正确反映有限空间中鱼类群体旋转运动的形成机理.本模型有望应用于智能水下机器人或空中无人机集群控制中. 本文将能量最小原理和元胞自动机结合,提出了一种数值模型,通过调试模型中各参数的数值,能够模拟出鱼群运动的一些规律,说明能量最小原理有可能是鱼类群体运动需要遵守的一个基本原理.本研究的意义在于该模型为研究鱼类或其他生物的群体运动提供了一个数值计算的理论框架,有助于后续研究在此框架的基础上进一步揭示群体和其所处环境之间的物理关系对群体运动特性的影响规律.本文仅针对包含同种个体的鱼群的运动形态进行了研究,而自然界中常有不同鱼类群体共存的现象,对不同生物群体间相互作用机理的研究将更具挑战性和理论价值.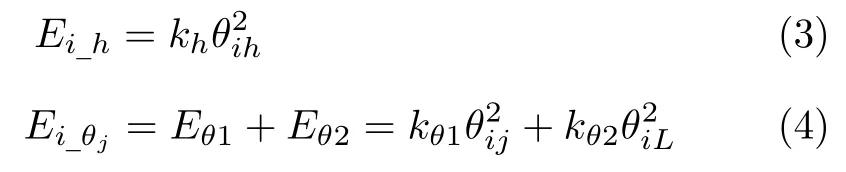
2 元胞自动机规则
3 实验
4 模拟
5 结论
