LiDAR/IMU紧耦合的实时定位方法
2021-07-25李帅鑫李广云杨啸天
李帅鑫 李广云 王 力 杨啸天
载体利用所搭载传感器的观测信息,在未知环境中进行实时自主定位并增量式构建环境地图的能力是无人系统的关键技术之一[1].激光雷达(LiDAR)因其分辨率高、抗干扰强、不受光照条件影响等特点被广泛应用于无人系统中,被称为“无人车的眼睛”.惯性导航技术(Inertial navigation system,INS)是一种不受外界因素干扰的自主导航手段,可以在卫星导航信号失锁情况下提供载体的位姿信息.因此将二者结合实现自主定位与地图构建已成为学术界与工业界的共识.然而,对于诸如无人机、智能机器人等运算资源有限的小型智能系统,实现实时的6 自由度(Degree of freedom,DoF)位姿估计并增量式构建环境地图是十分困难的.一方面,由于定位与地图构建相互依赖.位姿估计可以为地图构建提供必要的先验信息,而对已构建地图的重复观测又可以消除位姿估计的不确定度[1],二者的交织使得实时定位与地图构建(Simultaneous localization and mapping,SLAM)问题具有极高的复杂度.另一方面,由于数据流中包含了数据量庞大的点云,以及高频采样的惯性测量单元(Inertial measurement unit,IMU)数据,如何高效且充分地融合点云与IMU 数据也是一个难点.
点云配准是利用连续点云进行位姿推估的核心方法,迭代最邻近点算法(Iterative closest point,ICP)[2−3]是应用最为广泛的点云配准算法.Surmann 等将2D LiDAR 安装在编码器和转台上获取三维点云,并采用ICP 算法估计相LiDAR 的运动[4].Moosmann 等提出基于3D LiDAR 和ICP 的解决方案,介绍了一种基于匀速运动模型的点云扭曲的补偿方法并对补偿结果进行了分析[5].由于这两种方法均采用ICP 算法直接对大规模点云进行处理,配准效率低,实时性差;另外,这种增量式递推方法缺少对点云配准误差累计的优化后端.Droeschel 等提出多分辨率格网地图(Multi-resolution,MRS)的环境表达方式,和一种基于点云表面元模型的概率配准算法[6],并在此基础上提出了一种分层优化的后端图优化策略[7],实现对连续轨迹和地图的优化.但由于该方法侧重强调地图构建的一致性,因此将地图作为变量节点一并纳入后端优化中,运算量较大,在小型智能系统上难以达到实时性.Zhang 等提出的激光雷达里程计与地图构建方法(LiDAR odometry and mapping,LOAM)[8−9]代表该领域的最高水准,该方法在KITTI (Karlsruhe Institute of Technology and Toyota Technological Institute)[10]评测中排名第二1http://www.cvlibs.net/datasets/kitti/eval_odometry.php.LOAM 采用点到边和点到面的联合配准方法估计LiDAR 的相对运动;为保证实时性,在两线程上分别运行高频的激光里程计模块和低频的地图构建模块,低频线程接收高频线程的位姿估计结果.Shan 等在[11]中指出LOAM 在计算资源有限的条件下效果大大下降,并基于此提出了面向无人车(Unmanned ground vehicle,UGV)的轻量级LOAM 方法(Lightweight and ground-optimized LOAM,LeGOLOAM).该方法增加点云分割处理模块降低点云规模,采用两步法配准点云,并增加闭环检测线程实现对累计误差的在线修正.但这两种方法都只是利用IMU 提供的姿态信息为点云配准和点云畸变消除提供运动估计的先验信息,在优化计算时并未将其作为观测约束进行整体优化,数据利用不够充分.此外,仅依靠点云配准进行位姿推估和地图构建在实际应用中误差累计较大,且极易出现配准错误,尤其在较为缺乏结构性特征的室外环境下或LiDAR 快速旋转时.这对缺乏重定位能力的系统而言是致命的,将导致定位和地图构建的失败.Google 2016 年发布的开源SLAM 库Cartographer[12]采用一种分层优化的思路.前端采用无损卡尔曼滤波(Unscented Kalman filter,UKF)算法融合多源数据进行位姿推估并构建子地图.后端以子地图为基本单元构建优化问题,并提出分支界定算法加速子地图间约束的构建.该系统仅在前端进行了较为松散的数据耦合,而在后端优化时仍是仅以点云的匹配为约束,数据融合不够紧密.
多传感器数据紧融合算法整体可分为滤波算法和平滑算法两类[13−14].滤波算法[15−16]数据处理简单,实时性强,在工业界得到了广泛应用.但由于其本身的递推性质,线性化误差将不断累积,导致精度下降.平滑算法包括全平滑(Full smoothing)和固定滞延平滑(Fixed-lag smoothing)两种.全平滑[17]对所有变量整体优化,精度高,但在SLAM 问题中随着轨迹扩张变量个数激增,无法满足实时性.固定滞延平滑[18−19]是一种滤波和全优化的折中方式,它在时间轴上设置一个随时间滑动的固定窗口,每次仅优化窗口内的变量,并边缘化其余变量.由于优化迭代时所有变量都将被重新线性化,因此线性化累计误差较小,精度得到保证;同时由于窗口大小固定,优化变量个数基本不变,实时性可以满足.该算法的缺点是变量边缘化时协方差矩阵变稠密,这一定程度上增加了计算负担,影响了计算效率.Kaess 等用因子图(Fator graph)表示变量间的关系,提出一种增量式平滑的全优化算法[20−21],代表当前最先进的优化方法.该方法将因子图保存在贝叶斯树中[22],当有新的因子节点加入时,识别被影响的变量节点并仅对它们进行优化更新,从而维持全优化的稀疏特性.目前基于因子图全优化算法的IMU数据紧融合研究主要集中在相机与IMU 的组合中[23−24],而在LiDAR 与IMU 的组合中还鲜有涉及.
综上所述,针对小型智能系统的实时定位研究具有重要的现实意义,LiDAR/IMU 的紧耦合方案仍需进一步探讨.本文在LOAM[9]和LeGO-LOAM[11]的基础上并结合前期工作[25],提出一种在未知环境下,基于LiDAR/IMU 紧耦合的实时定位方法 —Inertial-LOAM,通过在预处理、配准和后端优化等多层次的数据融合,实现多源数据的紧密耦合,降低轨迹漂移,增强系统在室外开阔环境和快速转动时的鲁棒性.实验结果表明本文方法可以满足小型智能的实时定位需求,定位性能显著提升.
1 系统概述
系统接收3D LiDAR 的原始点云和IMU 输出的角速度及加速度数据,输出连续位姿估计和环境地图.需要说明的是,LiDAR/IMU 的外参数需预先标定,在后续数据处理中作为已知量.传感器需时间对齐,一般可由IMU 向LiDAR 输出PPS(Pulse per second)脉冲和推荐定位信息(GPRMC),实现同步触发;也可利用IMU 的高频输出特性,对带有时间戳的数据进行滤波和内插实现.
系统整体分为五个部分:1)数据预处理.将原始点云投影为深度图像,并进行快速的地面点及目标分割剔除野点,并从分割后的点云中提取特征点;同时,利用IMU 积分得到的相对运动估值对特征点进行畸变校正;2)激光里程计.将连续时刻的特征点配准,估计LiDAR 相对运动,并据此再次校正特征点;3)地图构建.将校正后的特征点与局部地图配准,优化位姿估计结果,并更新局部地图;4)闭合回环.检测轨迹是否闭合,并将闭合处的点云配准结果作为闭环约束关系;5)因子图优化.系统维护一个全局的因子图,各模块向因子图中插入IMU 预积分因子、配准因子和闭环因子,每当插入新的因子节点,优化计算一次.为保证实时性,系统在三个线程上并行运行,其中预处理和激光里程计占用主线程,地图构建和闭合回环各占一个分线程.Inertial-LOAM 系统框架图如图1.

图1 系统框架图Fig.1 The overview of the system
2 LiDAR/IMU 数据融合方法
2.1 基于因子图优化的状态估计
载体坐标系定义为 B,与IMU 坐标系保持一致;世界坐标系定义为 W,原点为系统初始化时的载体系中心,z轴方向与世界坐标系下的重力方向对齐;假设LiDAR 第i次扫描的起始时刻为ti,扫描得到的全部点云为Pi,其中任意一点记为Bpn∈Pi;IMU 在 [ti,ti+1]内采集的数据为I(i,i+1),由于IMU输出频率高于LiDAR,I(i,i+1)中包含了N组 B 下的加速度和角速度,n∈N.系统在ti时刻的状态包括姿态,位置,速度和IMU 零偏

其中,位姿变换构成特殊欧氏群[26][Ri,ti]∈SE(3);速度为欧氏空间下的三维向量vi∈R3;零偏项由陀螺仪零偏和加速度计零偏构成bi=.需要说明的是,本文侧重于研究系统的定位方法,因此地图点不作为状态量进行优化,以保证后端优化的运算效率.此外,所有LiDAR 的状态量过于庞大,且部分状态量十分冗余(如:LiDAR静止),若将其全部作为状态量进行优化,一方面很快就会超出计算机的运算能力,另一方面也会造成运算资源浪费.因此,在数据处理中仅选取具有代表性的关键帧作为优化估计的状态量.定义Kk为tk时刻的所有关键帧,其对应的状态量为;其对应的所有观测量为.
在这些假设和定义下,状态估计问题可描述为:在给定观测信息Zk和先验信息p(X0)的条件下,估计X0的后验概率问题,即
由于观测量已知,在联合概率分布中将其作为参数而非随机变量.根据马尔科夫性质,Pi仅与ti时刻的状态xi有关,则式(2)可分解为

变量因子的最大后验概率(Maximum a posteriori,MAP)可由式(3)推得

式中r表示观测模型与实际观测的残差,是关于状态量Xk的函数,Σ为对应的协方差矩阵.后文将对式(4)中各项的具体形式做详细说明.
2.2 数据预处理
1)点云数据处理
本文采用前期工作[25]中的运动模型估计方法校正点云,即根据预积分得到的相对运动估计将点云统一至同一时刻载体坐标系下.图2 为KITTI数据集[10]的处理实例.点云的特征提取主要分为以下步骤:
步骤 1.将无序的点云P转为有序的深度图,以提升点云搜索速度.的行数r为LiDAR 线阵的行数,列数c根据深度图水平角分辨率设定.中每个像素对应一个或几个点云中的点,像素值取最远点的深度值.如图2 (c),深度图大小为 64×860,每个像素约包含5 个点.
步骤 2.不同于LeGO-LOAM[11]中的地面点分割方法,本文采用基于角度图像的分割策略.首先根据垂直方向和水平方向的坐标差 Δx和 Δz计算深度图上同一列相邻行的两点A和B间的垂直夹角α(如图2 (d)),构成夹角图像,并对其采用Savitsky-Golay 滤波算法平滑处理得到如图2 (e)所示的平滑后夹角图像.对于车载点云,一般可以认为满足α接近于0 的像素是地面点所对应的区域;采用广度优先算法(Breadth-first search,BFS)算法在上搜索小于阈值的点,将其标记为地面点.
步骤 3.对剔除地面点后的深度图进行目标分割.当某一激光光束OP与两激光点连线P Q所构成的夹角较小时,认为两激光点P和Q位于不同目标上.循环搜索生成如图2 (f)的分割图像,并将中点数较少的目标作为野点剔除.

图2 点云分割示例Fig.2 Example of point cloud segmentation
步骤 4.将地面和目标分割后的部分作为特征图,并在其上进行特征提取,提取方法与文献[8]中相同.根据各点深度值di计算某一点在其同行邻域点S中的粗糙度θ:

并将θ较大的非地面点标记为边缘点PE,将θ较小的标记为平面点PF.从PE中选取nE个θ最大的点构成,从PF中选取nF个θ最小且为地面点的点构成.
2)IMU 数据处理
IMU 的观测模型为:

其中,η~N(0,Σ)表示观测噪声,为 B 到W的旋转矩阵,Wg为重力加速度.根据IMU 的动力学模型,采用离散化积分方法对在IMU 采样间隔时间 Δt内积分:
式中‘∧’符号表示将三维向量映射为反对称矩阵,由于IMU 输出频率很高,状态估计时若直接将IMU 采样时刻对应的全部位姿作为变量节点插入因子图进行优化,无疑是不现实的[21].通常通过预积分处理,将高频输出的加速度和角速度观测量转化为状态量间的位姿变换,构成关键帧状态量之间的约束因子[23],从而将所有IMU 观测量转化为一个预积分观测量,传感器采样频率与IMU 因子关系如图3.

图3 IMU 与LiDAR 的频率关系Fig.3 Frequencies of IMU and LiDAR
根据式(8)~(10)定义关键帧xi与xj间的运动增量:


为方便书写保证公式简洁,上式省略了左下标的坐标系标注,并将 (·)(ti)简写为(·)i;其中Δtij=.假设关键帧xi与xj间的IMU 零偏保持不变,则可由式(11)~(13)可得预积分观测模型[13]:

2.3 激光里程计


因此,将式(19)分别代入式(17)和式(18),得:

令d最小,利用Levenberg-Maquardt 算法即可求解旋转量和平移量的估值.
2.4 地图构建
LOAM 和LeGO-LOAM 中并未定义局部地图,只是根据垂直角可视范围,以传感器为中心搜索与索引特征点可能存在匹配的地图点.这种粗略的搜索方法过于依赖阈值:搜索得到的地图点过多,则配准效率低下;若地图点过少,则可能造成地图点与特征点对周围环境表达的不一致,部分可观测的地图点缺失,导致配准精度下降.
与文献[27−28]类似,本文提出采用以传感器为中心的多尺度地图模型建立局部地图Mk,并定义Mk的参考系与当前关键帧一致mk=xi,地图构建模块每运行一次,便插入一个关键帧.局部地图共分三层,各层栅格大小不一,相互嵌套.栅格中的点存储于环形容器中,保持局部地图中点个数不变,从而保持地图配准模块的处理速度相对恒定.点坐标保存为点在栅格内的相对位置,以便于局部地图坐标系变化时点坐标更新.局部地图的示意图如图4,大小不一的三种栅格分别表示不同分辨率的格网地图;栅格中的点表示该格网中存储的点云;当载体运动时局部地图随之移动,局部地图的中心由mk−1的原点Oold向mk的原点Onew移动,局部地图向前进方向添加栅格,并剔除远离方向的栅格.
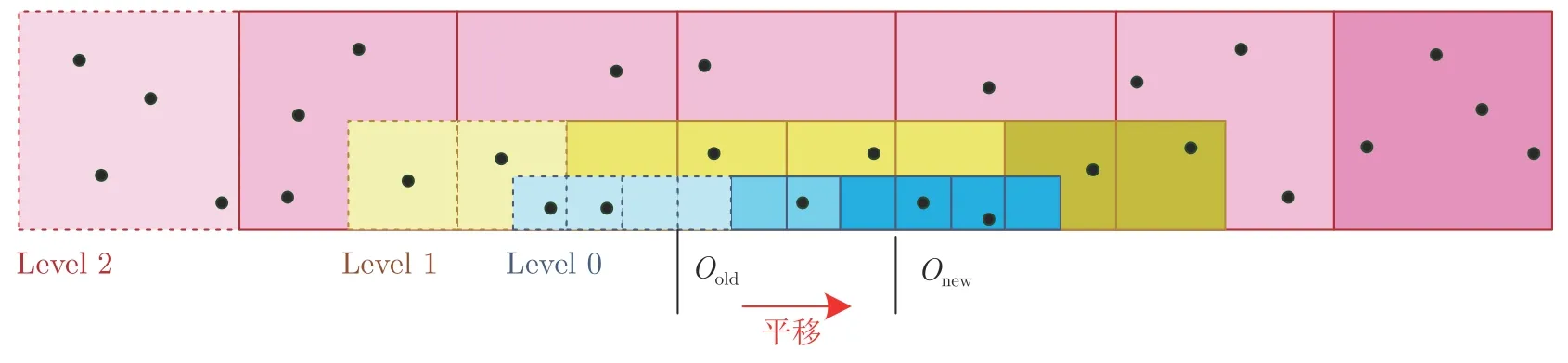
图4 局部地图示意图Fig.4 Demonstration for the local map
这种局部地图表示方法有两个特点:1)由于局部地图始终保持以载体为中心,使得地图中的点大部分位于LiDAR 的可视范围内,避免了对不可视地图点的搜索.2)多分辨率格网地图更符合LiDAR 放射状采样的性质,近处点云密集,而远处相对稀疏.随着移动LiDAR 的移动高分辨率栅格内的点逐渐增加并稳定,能够更准确地刻画环境的真实面貌,避免地图点与特征点不一致性的产生.这也是与其他格网地图表达点云方法[27−28]的最主要区别.
2.5 闭合回环
闭合回环模块检测载体的轨迹是否形成闭合,即是检测载体是否回到之前的位置.若构成闭环则利用GICP 算法将当前的特征点云与闭环处的特征点云配准,得到相对位姿关系,构成闭环约束因子,并将其插入因子图中.闭环检测根据当前关键帧位置与其余关键帧间的距离判断:将关键帧列表保存于KD 树中,以半径R搜索当前关键帧的相邻关键帧,并根据采样时间判断是否为相邻时刻的关键帧.
本文提出采用大闭环与小闭环结合的方式,大闭环表示机器人回到之前的位置,可以建立闭环约束修正全局误差累计;而小闭环则表示间隔关键帧之间的共视关系,可以为转角位置提供更多约束,从而提升激光里程计对LiDAR 旋转运动的鲁棒性.
2.6 因子图优化
因子图优化模块在系统中维护一个全局因子图,因子图结构如图5.图中右侧为系统实际运行时构建的因子图,左侧是对其结构的抽象化说明.假设给定初始状态X0,对应式(4)中的.地图构建模块向因子图插入配准因子,对应式(4)中的:

图5 因子图结构Fig.5 Structure of the factor graph

数据预处理模块计算相邻关键帧之间的IMU 预积分,并向因子图插入IMU 预积分因子,对应式(4)中的:


式中⊖表示 se(3)中位姿变换的逆运算.每当因子图中插入新的节点,就对整个因子图优化计算一次,更新当前时刻的位姿估计,实现点云数据和IMU数据的深度融合.公式推导参考文献[13].
3 实验与分析
3.1 实验及设备介绍
为客观全面地评估本文所提方法的性能,共进行两组实验:1)采用文献[11]公开的两组数据集1#和3#对系统运行速度、闭环优化效果进行评价和对比;2)分别采用文献[11]公开的数据集2#和实测数据,根据回到起始点的位姿偏差定量评估系统定位精度.数据采集平台为搭载了Xsens MTi-G-710 IMU 和Velodyne VLP-16 LiDAR 的地面移动机器人(如图6),数据采集频率分别为200 Hz 和10 Hz,两传感器采用软同步方式进行时间对齐.数据采集环境为室内地下停车场和室外开阔广场(如图10 (c)和10 (d)),数据采集时间约为1 000 s,平台运动速度约为1 m/s,总距离约为1 km.系统采用C++实现,在机器人操作系统(Robot operation system,ROS)中运行.小型智能地面机器人的数据处理器为4 GB 内存并搭载Intel i5 1.8 GHz CPU 的终端(如图6).

图6 数据采集平台Fig.6 Data collection platform
在数据融合前,需要对系统进行初始化,其主要目的是:1)获得IMU 与LiDAR 之间的相对位姿,即传感器外参数;2)计算载体系 B 下的重力加速度Bg,从而得到载体坐标系 B 到世界坐标系W的转换关系.结合本文对坐标系统的定义,在本实验中,Bg采用文献[23]中所述方法计算得到,而后将其旋转至 W 系下得到旋转关系;为保证精度,LiDAR/IMU 外参数的标定在结构性较好且设置了特殊靶标的实验室预先进行,数据处理中作为已知量.基本原理是分别采用激光雷达里程计和IMU 预积分得到一段时间内相邻状态间的约束,从而构建关于的优化方程:

用特殊氏式群[26][Ri,ti]∈SE(3)表达位姿变换,即可在流形上利用L-M 算法求解外参的估值.一般而言,传感器外参数在数据采集过程中保持不变,因此在后续数据处理中可将其作为固定量.
3.2 运行效率对比及闭环优化结果分析
分别统计LeGO-LOAM 和本文Inertial-LOAM对1# 和3# 两组数据集的单帧数据处理时间,包括数据预处理,激光里程计,地图构建,优化计算等各模块及系统总体的单帧处理时长(如图7),比较并分析两系统数据处理的速度和效率.
从图中可以看出:两系统总处理时间的95 %以上都小于LiDAR 的采样间隔0.1 s,说明系统满足实时处理的要求;由于Inertial-LOAM 采用多分辨率局部地图,地图构建模块避免了对全局地图点的搜索,因此平均处理速度更快.而在数据预处理时,由于增加了IMU 数据的预积分计算,该模块处理时间略有增加;另外,Inertial-LOAM 的优化计算时间并未明显增加,说明融合IMU 数据后并未过多增加系统的计算负担.
根据闭环优化前后的地图偏差定性评价闭环优化对系统定位和建图精度的提升作用,1# 和3#两组数据闭环优化前后所构建的地图及轨迹如图7.从图7 (a)可以明显看出,闭环优化可以有效处理大闭环造成的累计误差,对轨迹精度和地图一致性的提升具有重要作用;图7(b)的激光里程计误差累计不明显,因此闭环优化作用效果不甚显著.采用Inertial-LOAM 方法和文献[11]中1# 和3# 数据,构建的地图和轨迹的结果如图10 (a)和10 (b).

图7 系统运行时间对比Fig.7 Comparison of time cost of two systems
3.3 定位精度分析
在IMU 和LiDAR 数据融合时,对传感器观测量的信任度由观测量的质量决定.因此需要预先标定IMU,统计其阿伦方差量,以确定对角速度和加速度观测值的信任程度.
实验时,在起点附近架设高精度全站仪,并在机器人上粘贴标志点.每当测量平台回到起点附近时,用高精度全站仪观测标志点,并以其位姿变换作为相对变换的参考值GT.估计的位姿Wx的精度由累计误差的均方根(Root mean square error,RMSE)表示:

其中,⊖表示位姿变换的逆运算.采用起终点相同的2# 数据,分别对Cartographer[12],LeGO-LOAM[11],LOAM[8],IMU 和本文所提出的Inertial-LOAM(以下分别简称为C,LL,L,I,和IL)进行精度对比,并说明IMU 在数据融合中的作用;采用实测的室内停车场、室外开阔广场数据对比IL,LL,L 和C 的精度,分析本文方法的性能和优势.误差累计结果如表1.需要说明的是,为客观评价系统漂移程度,实验结果均未进行闭环优化,LL,L 和C 均为加入IMU 观测后的结果,误差累计均为各系统处理5 次的平均值.
2# 数据的采集环境与3#相同,特征丰富但机器人运动较快.由表1 可以看出,仅利用IMU 积分的位姿推估误差累计严重,无法得到正确的结果.因此,在后续实验中不再将其作为对比对象.尽管IMU 位置漂移严重,但姿态偏差相对较小.说明IMU 能提供一个较好的姿态约束,而这正是LiDAR 里程计所缺少的,间接反映了激光里程计与IMU 耦合的优势.
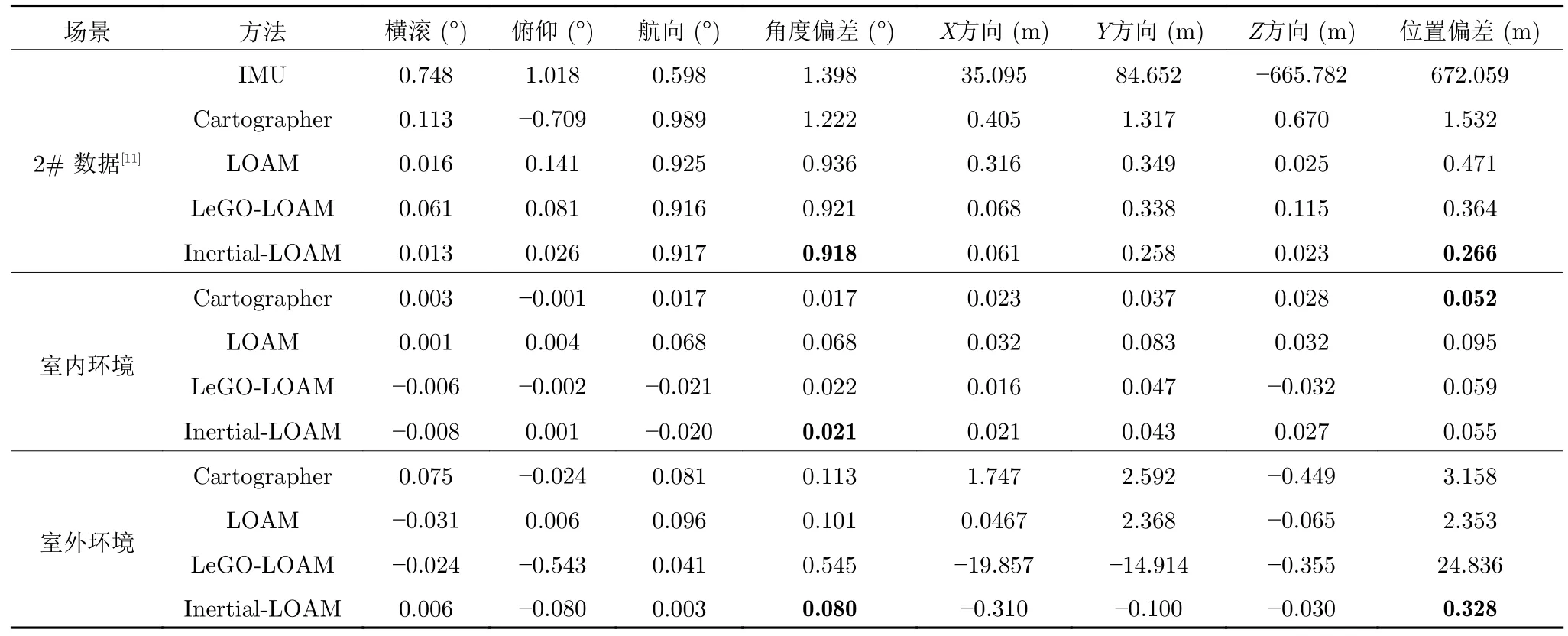
表1 累计误差结果Table 1 Error accumulation result
在室外特征丰富但运动较快的情况下,L、LL和IL 均能得到分米级的定位结果而C 精度较差.LL 和IL 在数据预处理阶段对特征点云进行了目标分割,剔除了大量主要特征以外的野点,避免其对配准精度的影响,因此较L 的精度有所提升,其中IL 最优.由于C 将三维点云投影至二维格网中,它对类似墙面等结构性较强的环境有较好的适应性,而室外诸如树木、车辆等特征不能保证较好的配准精度.因此,即便在前端融合了IMU 数据,最终仍产生较大误差.
在相对狭小的室内环境中,C、LL 与IL 的位姿估计精度基本都在0.05 m 左右,其中C 方法最优,较L 提升近一倍,四种方法的定位精度均能达到厘米量级.由于室内相对狭小,路面平坦,且包含大量的墙面及边沿线等明显的结构特征,点云配准精度高,在IMU/LiDAR 数据融合解算时占据更大权重,因此IMU 对定位结果的作用较小.室内环境中IL 地图和轨迹结果如图10 (c).
在室外开阔且运动相对平缓的条件下,LL 随运行时间增加,误差累计愈发严重,无法得到可靠的位姿估计结果;L 和C 性能优于LL,但仍存在一定误差累计.在不采用闭环优化的前提下,IL 通过融合IMU 信息,显著降低定位漂移,精度仍能达到分米量级.四者轨迹和地图结果对比如图9.室外空间较为开阔且结构性特征较少,路面不够平整造成移动机器人运动时产生剧烈的震动,因此点云包含较多噪点.由于未在后端优化中融入IMU 观测约束,且LL 为了适应轻量级终端,提取的特征点云较为稀疏,导致配准误差较大,出现明显的误差累计;尽管L 的运行效率不及LL,但相对稠密的点云保证了其配准的精度,但轨迹仍不可避免的存在漂移;虽然C 在前端融合了IMU 数据,但本质上只是利用融合的数据构建更为精确的局部地图,以此保证更准确的前端匹配,导致数据融合的作用在后端优化中体现不明显,不足以弥补连续配准引起的轨迹发散问题.本文提出的IL 通过充分融合LiDAR 和IMU 的观测信息对轨迹进行整体优化,有效降低了轨迹漂移,提升了位姿估计的精度.从图9 的对比中还可以看出,融合IMU 信息后系统在快速直角转弯处的表现显著提升,反映了IMU 良好的姿态约束的作用.采用室外数据和IL 方法所构建的地图和轨迹结果如图10 (d).

图8 闭环优化效果Fig.8 Performance of loop optimization

图9 室外开阔环境IL/LL/L/C 轨迹结果对比Fig.9 Comparison of pose estimation of IL/LL/L/C in outdoor environment

图10 Inertial-LOAM 轨迹及建图结果Fig.10 Trajectory and mapping result of Inertial-LOAM
4 结论
本文面向小型智能平台,针对现有的LiDAR/IMU SLAM 方法数据融合不充分,对开阔环境和快速旋转鲁棒性差,地图构建缺乏一致性的问题,提出了一种LiDAR/IMU 紧耦合的实时定位方法— Inertial-LOAM.首先在数据预处理阶段采用地面分割效果更好的基于夹角图像的地面点云分割方法,并对IMU 数据进行预积分处理.其次,在地图构建阶段定义了一个以传感器为中心的MRS 局部地图,提升地图匹配的速度和精度.最后,在系统中增加因子图优化模块,对LiDAR 和IMU 观测数据进行整体优化,实现多源观测值的紧密耦合.
采用实测数据对系统进行全面测试和评估,可以得到以下结论:
1)IMU 预积分计算略微增加了数据预处理时间,同时IMU 预积分因子的加入使因子图结构更为复杂,但整体而言对系统的运算负担增加不大,可以满足实时性要求;另外由于定义了MRS 局部地图,避免了对全局地图的搜索,地图构建模块速度更快.
2)闭合回环对系统精度的提升具有重要作用.通过对整体误差的修正,能够有效降低误差累计对定位结果带来的影响,提升构建地图的一致性.
3)在结构特征不明显的开阔室外环境,LeGOLOAM 等方法无法进行可靠的位姿估计,而Inertial-LOAM 仍能得到准确的定位结果;同时,在快速直角转弯处,Inertial-LOAM 较依赖点云配准的LeGO-LOAM 具有更为稳定可靠的表现.
