非匹配扰动下的多智能体系统固定时间一致跟踪
2021-07-25孙小童张鹏飞
孙小童 郭 戈 ,2,3 张鹏飞
多智能体一致性控制广泛应用于移动机器人编队任务[1]、集群航天器深空探测[2]等领域,是指通过设计基于信息交换的一致性协议,保证所有智能体的状态达到一致[3−5].其主要问题包括领导者跟随一致性[6]与无领导一致性[7].领导者跟随一致性即选择一个或多个智能体作为领导者,以实现一致跟踪[8].现有相关工作已取得部分成果,但多属于渐近稳定范畴.相比之下,有限时间一致性控制可得到有限的截止时间,且具有较强的抗干扰能力与较快的稳定速度[9].
文献[10]引入非奇异终端滑模控制,建立一种能在有限时间内达到多智能体系统一致的一致跟踪算法.文献[11]采用李雅普诺夫方法进行一致性设计,实现多智能体系统有限时间收敛.文献[12]研究了具有有界扰动的二阶多智能体系统的自适应有限时间一致性问题,基于积分滑模面设计自适应算法克服扰动,实现有限时间一致性.
此外,文献[13−15]通过输出反馈对多智能体系统的有限时间一致性进行了研究.但上述结果的收敛时间依赖于初始条件,即初始条件越大,敛时间越长,且随着初始条件趋于无穷,收敛时间无限增长.为此,固定时间稳定性的概念被提出[16],它要求在有限时间稳定性的基础上,在任意初始条件下收敛时间的上界都应为常数.文献[17]研究了多智能体系统的固定时间一致性问题,在固定时间一致性问题中,收敛时间与初始状态无关.文献[18−24]提出了几种多智能体系统固定时间一致性算法,其中文献[18]引入一种正弦补偿函数来克服系统存在的奇异性.此外,由于扰动的存在,在实际应用中必须考虑存在内部不确定性和外部扰动的影响.固定时间一致性问题中的抗干扰问题得到广泛关注.文献[19]研究了具有输入延时与不确定扰动的多智能体系统固定时间一致性问题.文献[21]研究了具有不确定扰动的非线性多智能体系统固定时间一致性问题.文献[22]考虑了具有外部扰动的二阶多智能体系统的一致性问题,构造了一个扰动观测器来估计外部扰动.早期工作中,多智能体系统分布式协同抗扰大都假设扰动或不确定性存在于控制输入的同一通道中,为匹配扰动,然而很少关注具有非匹配扰动的多智能体系统的固定时间稳定问题.
针对具有非匹配扰动的多智能体系统固定时间一致性问题,文献[25]考虑了具有扰动的二阶多智能体系统的固定时间一致问题,提出了一种状态观测器.该观测器只需要在固定时间内利用输出信息就可对系统状态进行估计.每个智能体的动力学分别由具有约束条件的匹配扰动和非匹配扰动组成.通过控制器和虚拟速度的设计,克服了各智能体之间存在的干扰,使多智能体系统能够达到固定时间一致.但是这篇文章存在奇异性,对不连续函数进行了求导.我们基于这种情况进行了改进,引入正弦补偿函数设计非奇异分布协议,避免系统的奇异性且克服非匹配扰动,使多智能体系统实现固定时间一致跟踪.
第1 节,主要介绍了一些概念和引理.第2 节,提出了一种固定时间扰动观测器.第3 节研究了固定时间控制及固定时间一致跟踪的问题.第4 节,用一个仿真算例来证明理论结果的有效性.最后,第5 节做出了总结.
1 问题描述与预备知识
1.1 问题描述
本文研究目标:利用一种非奇异控制协议,使多智能体系统实现固定时间一致跟踪.
考虑如下多智能体系统,

其中xi∈R,vi∈R,ui∈R分别表示第i个智能体的位置、速度和输入,fi∈R 是与控制输入ui∈R在相同信道中的有界扰动,di∈R表示第i个智能体的非匹配扰动,i∈ℓN:={1,2,···,N}.参考模型可描述为

其中x0∈R,v0∈R,u0∈R 分别表示参考系统的位置,速度和输入.多智能体系统(1)中引入一个领航者π0,其状态ξ0=[x0,v0]T.定义一个非负对角阵B=diag{b1,b2,···,bn}表示智能体对ξ0的可访问性,若ξ0可以被第i个智能体访问,则bi=1,否则bi=0.
假设 1.在有向网络拓扑中,至少有一个智能体可获取领航者信息,即B≠0.
假设 2.智能体无法获取领航者的输入u0(t),但其上界可知.
假设 3.di为外部扰动,满足

其中D >0,为已知常数.
假设 4.扰动fi的一阶导数有界,且满足,Li为其上界.
注 1.假设3 存在于实际中,如车辆、船舶或飞机等载体在行进过程中,所受阻力会随速度增加而变大,当阻力到达某极限值后不再变化,如文献[26]关于船舶阻尼系数的研究.存在多个文献对此类扰动进行了研究如文献[25].
注 2.在假设4 中,假设扰动一阶导数是有界的,因为扰动不可能无限快地变化.
1.2 预备知识
1.2.1 代数图论
设N阶加权图g(A)={ν,ε,A}表示n个多智能体之间的通信拓扑,且每个智能体作为节点,其由节点集ν(g)={π1,π2,···,πn},边集ε(g)⊆ν×ν,和加权邻接矩阵A=[aij]∈RN×N(aij >0)组成.在加权图g(A)中边 (πi,πj)表示节点πi的状态可以应用于节点πj,但节点πj的状态不一定可以应用于节点πj.如果 (πi,πj)∈ε,节点πi称为节点πj的邻节点.πi的所有邻节点可以用集合λj={i:(πi,πj)∈ε}来表示.当 (πi,πj)∈ε时,有向图的加权邻接矩阵定义为aij=1 ,对于其他情况aij=0,g的拉普拉斯矩阵表示为L=[lij]∈RN×N.若一个边的子集形成一个生成树,那一个图就有一个有向生成树.
1.2.2 重要引理
引理 1[27].设ξ1,ξ2,···,ξN≥0,则有

引理 2[28].考虑如下标量系统,

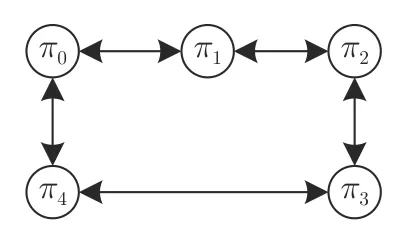
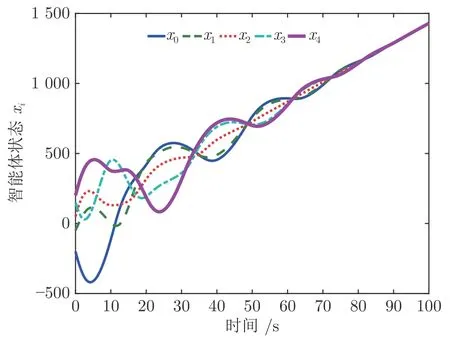
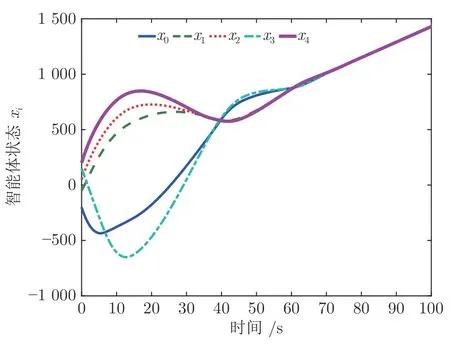
其中α>0,β >0,m,n,p,q是正奇数且m>n,p 若ε:=[q(m −n)]/[n(q −p)]≤1,稳定时间为 定义 1.在给定ui的情况下,对∀ξi(0)和∀i,j∈ℓN,存在正常数Tmax使得∀t>Tmax,且ξi(t)=ξ0(t)则式(1)中的闭环系统实现固定时间一致跟踪,其中ξi:=[xi,vi]T. 定义 2.固定时间收敛是指系统状态从任意初始条件出发,都将在有限时间内收敛到平衡点,且收敛时间一致有界. 针对多智能体系统抗扰问题,通常采用滑模扰动观测器来提高对不确定性和干扰的鲁棒性.然而,在传统的滑模扰动观测器中,估计误差渐近或有限时间收敛为零,当初始误差较大,收敛时间可能很长.此外,滑模扰动观测器中通常存在抖振问题.考虑到这两个问题,本文设计固定时间扰动观测器对扰动进行估计,且利用非奇异控制协议使多智能体系统实现固定时间一致跟踪. 对多智能体系统(1)设计如下固定时间扰动观测器,对其扰动fi进行估计. 对于多智能体系统(1),固定时间扰动观测器如式(8)所示,定义为系统扰动的估计误差,在固定时间内,固定时间扰动观测器的估计误差收敛到原点,即,通过假设4 可得收敛时间界限为 其中Mi=ki,3+Li,mi=ki,3−Li,h(ki,1)=1/ki,1+[2e/(miki,1)]1/3,e 为自然对数的底数,控制增益满足ki,3>Li,ki,1h−1(ki,1)>Mi. 扰动fi经过固定时间扰动观测器观测后在下文中为已知数值. 注 3.在式(8)积分项中存在符号函数,因此,估计值是连续的,避免了抖振问题. 注 4.不等式(9)表明系统(8)的收敛时间由观测器初值限制,与系统初始状态无关. 本节研究单个系统固定时间控制问题,引入一种正弦补偿函数,得到非奇异固定时间控制方法,为下节一致跟踪问题提供理论基础. 考虑任意子系统,定义z1=xi,z2=vi,d=di,f=fi则系统如下 其中z=[z1,z2]T∈R2表示系统的状态向量,u∈R为控制输入. 定义mχ,nχ,pχ,qχ为正奇数,且满足mχ >nχ,p1 其中τ为正常数. 为避免奇异性问题,引入如下滑模面[18] 其中k(·):R→R+表示标量正函数 为书写方便,下文将省略k(·)中的参数.当s=0时可得. 定义一种新的固定时间控制律 其中, 对于∀ω >0存在 sinωx≤x. 定理 1.考虑二阶系统,控制协议(14)使其状态z=[z1,z2]T全局固定时间收敛,且收敛时间为 其中,Tχ:=nχ/[αχ(mχ −nχ)]+qχ/[βχ(qχ −pχ)](χ=1,2),θ(τ)表示与τ相关的最小时间区域. 证明.对s进行求导得到 定义u=u1+u2+u3+u4,其中u2,u3,u4用来克服扰动d与f,将在下文对其进行定义,将u代入式(16)可得 若z2≠0 则µτ(·)>0,为方便证明,将状态空间z∈R{2分成两个不同的}空间,如{图1[18]所示,其中}. 图1 系统的相位图Fig.1 The phase plot of the system 若相位图1 中任意位置都可以在Tmax内到达滑模面s=0 ,则全局收敛实现.当系统状态(z1,z2)处于S1区域时,函数µτ(·)为1.据引理2,状态(z1,z2)将到达滑动面s=0或在固定时间内进入S2区域,在S2中当z2≠0 时0<µτ <1.据式(20)及引理2 可得,滑动面s=0仍然是一个吸引域.在靠近z1轴时z2趋近于0,且,控制输入(14)变为,当时,若则s>0 ,则s<0.因此z(t)将在固定时间θ(τ)内单调地越过S2进入S1(如图1 所示).所以在时间t1 注 5.对于包括z1=0的非常小的z1=0,S2中的z2→0表示系统轨迹接近滑模面s=0,保证了固定时间收敛性,因此θ(τ)→0.由于对T2的保守估计,当τ足够小时,忽略θ(τ)是有实践意义的.参数约束条件m1/n1−p1/q1>1,p1/q1>1/2 可使ε1>1.因为可能存在ε2≤1,所以稳定时间(7)仅适用于计算短暂的T2. 注 6.对于多智能体系统固定时间一致控制问题,文献[25]研究了存在非匹配扰动的情况,但其存在奇异性,对不连续函数进行了求导,我们引入文献[18]中的方法避免了系统的奇异性,与文献[18]相比我们通过改进滑模面克服了非匹配扰动. 为解决固定时间一致跟踪问题,引入一种改进的非奇异分布式协议 其中滑模面si表示为 其中, m2>n2,p2 定理 2.考虑多智能体系统(1)和(2),如满足假设1 和2,非奇异分布协议(22)可使多智能体系统实现固定时间一致跟踪,其中,稳定时间T满足 且 其中,χ=(1,2),θ(τ)表示最小时间间隔. 证明.1)当si≠0 时,将式(22)代入式(21)可得 将式(23)对时间求导并且将式(27)代入其中可得 2)当滑模面si=0 时,式(23)可化为 其中,i∈ℓN.构造一个Lyapunov 函数V3=,应用引理1 可得 若V3≠0,则为下列微分方程的解 与 1)中结果相同,对于∀i∈ℓN,可以得到,稳定时间t1 因此ep在T 为将交互拓扑并入滑模面,定义新的滑动变量 定理 3.考虑多智能体系统(1)和(2),如满足假设1 和2,非奇异分布协议(36)可使多智能体系统实现固定时间一致跟踪,稳定时间T满足 其中, 证明.定理2 与定理3 都是为多智能体系统(1)和(2)设计非奇异分布协议,使多智能体系统实现固定时间一致跟踪.该定理的证明与定理2 的证明有同样思路,证明过程本文不再赘述. 注 7.稳定时间(38)也依赖于交互拓扑属性,即.此外,在滑动变量的定义中引入了交互拓扑,保证了转换过程中的一致性. 本文在协议中引入连续的正弦补偿函数消除了奇异性.此外,分布式控制协议(22)与(36)均可实现多智能体系统(1)和(2)的固定时间一致跟踪,且截止时间与初始条件无关,相比协议(22),协议(36)更侧重多智能体系统在实现一致跟踪过程中的编队效率,减小超调. 1)选择系统参数α1,β1,α2,β2,m1,n1,m2,n2,p1,q1,p2,q2,τ. 2)定义系统状态. 3)根据定义的系统状态设计固定时间扰动观测器. 4)根据所设计的固定时间扰动测器来设计固定时间一致控制协议. 5)根据设计的固定时间一致控制协议来设计固定时间一致跟踪控制协议. 图2 算法流程图Fig.2 Algorithm flowchart 本章通过MATLAB/SIMULINK 仿真来验证所提固定时间一致算法的有效性. 考虑一组智能体由1 个领导者和4 个跟随者组成,其交互图如图3 所示.将虚拟领导者(2)的控制输入设计为u0=−sin(x0)/(1+exp(−t))使得.定义智能体组初始状态为x(0)=[−200,−50,50,150,200]T,v(0)=[−100,60,90,−80,100]T,扰动di=10 sin(0.1xi),fi=2 cos(xi(t)),根据引理2,为了使参数满足约束条件m1/n1−p1/q1>1,p1/q1>1/2,将式(22)和式(36)中的参数赋值为α1=β1=α2=β2=4,m1=9,n1=5,p1=7,q1=9,m2=11 ,n2=9 ,p2=5 ,q2=7,τ=0.1. 图3 交互拓扑图geFig.3 The topology graph ge 仿真结果如下图所示,图4 与图6 为多智能体系统在两种控制协议下的位置轨迹,图5 与图7 为多智能体系统在两种控制协议下的速度轨迹,由图分析可得收敛时间小于最大收敛时间,在固定时间内多智能体系统达到了一致跟踪的目标,验证了定理2 和定理3 中控制协议的有效性. 图4 协议(22)下的位置轨迹Fig.4 Position trajectory under protocol (22) 图5 协议(22)下的速度轨迹Fig.5 Speed trajectory under protocol (22) 图6 协议(36)下的位置轨迹Fig.6 Position trajectory under protocol (36) 图7 协议(36)下的速度轨迹Fig.7 Speed trajectory under protocol (36) 本文研究了多智能体系统存在非匹配扰动的情况下,实现固定时间一致跟踪问题.基于固定时间状态观测器与设计的算法,在存在非匹配干扰的情况下,实现多智能体系统固定时间一致跟踪.由于多智能体系统中存在干扰,本文所引入固定时间扰动观测器可以估计出系统匹配扰动,并设计相应的非奇异固定时间算法避免系统存在的奇异性且克服非匹配扰动,使多智能体系统实现固定时间一致跟踪.最后,通过仿真算例验证了算法的有效性.

2 固定时间扰动观测器设计

3 主要结论
3.1 非奇异固定时间控制











3.2 非奇异固定时间一致跟踪
















3.3 算法

4 系统仿真


5 结论
