执行机构带宽对动态逆方法的影响及解决方案
2021-07-25程艳青朱纪洪
程艳青 朱纪洪
自上世纪80 年代起,控制界开始采用非线性动态逆(Nonlinear dynamic inversion,NDI,后面都简称动态逆)方法来设计多变量非线性系统的控制律,这是一种利用非线性状态反馈的方式将一个非线性系统变成线性系统,然后再利用我们熟知的线性系统设计方法对变换后的线性系统进行设计,因此动态逆方法又称为反馈线性化方法.动态逆最先应用在飞行控制律设计方面,尤其是战斗机大迎角超机动控制律设计[1−4],该方法可以通过逆模型来对消掉大迎角气动非线性和动力学非线性,从而将一个强非线性系统变成几个独立线性系统(最常见的为一阶惯性系统),在线性化的同时实现了多通道的解耦,此外动态逆方法还可应用于航天飞行器的再入制导和控制[5−6],机械臂控制[7]和倒立摆控制[8−9](垂直起降火箭和平衡车).动态逆方法采用非线性逆系统理论来设计控制律,在对系统进行线性化的同时实现多变量系统解耦控制,用动态逆方法设计的控制器可以对被控对象的控制变量在全过程进行动态特性处理,以达到期望的特性[10].动态逆设计方法在设计过程中避免了大量的调参工作,设计出来的控制律具有较强的适应性和通用性,不像基于特征点的线性系统设计方法,需要依据特征点的不同来调整控制律参数.传统的动态逆方法都是采用逆模型来对消系统非线性,当逆模型有较大不确定性时,不仅系统非线性不能完全对消,闭环系统稳定性也会受到影响,因此陆续提出了一系列的具有较好鲁棒性的动态逆控制方法,比如采用L1自适应方法与动态逆方法相结合[11−12],用动态逆方法设计初步控制律,在此基础上引入自适应律和一个低通滤波器来保证系统的鲁棒性,文献[13]则采用滑模变结构方法和动态逆方法相结合,实际控制输入由两部分组成:动态逆控制律和滑模变结构控制律,其中滑模变结构控制律可有效抑制模型的不确定性影响.上述方法都是采用传统的动态逆与鲁棒控制方法相结合来增强控制系统的鲁棒性,本质上还是以动态逆方法为基础.文献[14−16]中的增量非线性动态逆(Incremental nonlinear dynamic inversion,INDI,后面简称增量动态逆)方法则是以状态变化率作为反馈项,由于模型不确定性可通过状态变化率直接体现,因此增量动态逆与传统动态逆方法相比,鲁棒性得到较大的提升.然而不管是传统的动态逆方法(包括与鲁棒控制相结合)还是增量动态逆方法,在设计非线性系统控制律时并不能有效考虑执行机构的动态特性,尤其是当执行机构带宽与闭环等效系统带宽较为接近时,执行机构对最后的闭环动态特性影响较大.在动态逆控制律当中,执行机构作为一个子系统处在逆系统和对象非线性系统之间,通过对非线性补偿后的伪线性系统进行再设计的方式并不能有效消除执行机构动态特性影响,最为有效的方式是直接对执行机构子系统的动态特性进行补偿,使补偿后的子系统动态远高于闭环系统动态,从而消除因执行机构带宽较低给非线性系统控制带来的不利影响.文献[17−18]中在执行机构模型已知的情况下,通过对执行机构子系统设计线性补偿器提高补偿后子系统的期望动态特性,本文则通过引入模型参考自适应系统,在执行机构模型未知的情况下,将补偿后的子系统带宽提高到合适值,此外本文还给出了一种通过修正非线性反馈项的方法来消除执行机构动态特性的影响,并将这种方法与前面单方面提高执行机构等效带宽的方法进行了对比.
1 问题的描述
1.1 对常规动态逆的影响
存在如下仿射非线性动力学系统:
式中:x为系统状态;u为控制输入;y为期望的控制系统输出.若系统相对阶为r,对系统测量方程进行r次微分,由系统相对阶的定义,有下列条件成立:

因此通过r次微分后,可得到包含显式系统控制输入的方程:

若取如下控制规律:

其中v为虚拟控制量,符号 (·)−R表示广义右逆,若系统满足条件相对阶r=1 且 dim(x)=dim(u),比如常见飞行器姿态动力学系统,则动力学系统动态逆控制律可以表示为如下简易形式:

具体结构如图1 所示:
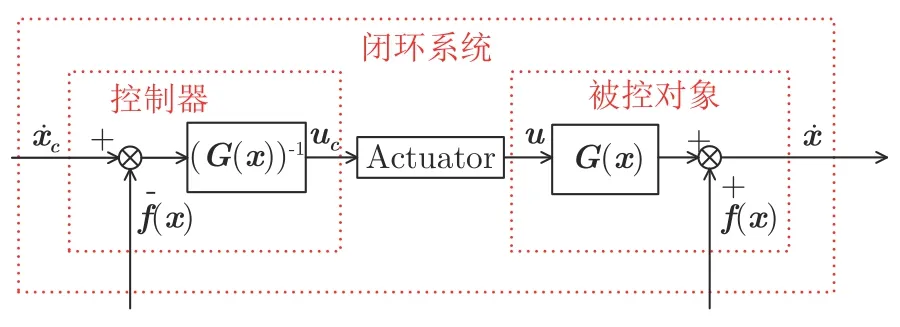
图1 典型动态逆的原理图Fig.1 Schematic diagram of typical dynamic inversion
对于如图1 所示的典型非线性动态逆控制问题,若执行机构输入uc的频率(取决于控制律的指令动态)远小于执行机构带宽ωa,则执行机构输入uc近似等于执行机构输出u,控制器、执行机构以及被控对象的组合系统等价于单位阵,以此单位阵为基础,合理设计满足品质要求的状态变化率指令,形成最终的动态逆控制律.但是实际控制过程中,往往由于执行机构本身物理特性限制,控制输入uc的频率与执行机构带宽ωa较为接近,此时输入uc与输出u在幅值和相位上都有较大的差异,控制输入的频率与执行机构带宽越接近,幅值和相位上的差异越大.
假定执行机构动态特性为一阶惯性环节,则有下式成立:

经过变形后上式可以表示成:

显然从上式可以看出,若非线性反馈项f(x)频率与执行机构带宽ωa相近或超出,式(7)中的非线性项无法忽略掉.
1.2 对增量动态逆的影响
为解决常规动态逆方法鲁棒性较差的问题,Smith 博士将增量思想引入到动态逆方法当中[14],用于完整的飞行控制律设计,具体思想是将状态方程在某个邻域内泰勒展开,得到非线性系统的增量模型,仍然以上节相对阶为1 的非线性系统为例,则控制机构增量与系统状态之间的关系如下[15]:

其中:

若执行机构带宽和控制频率足够高,则上式中的f′(x)(x −x0)项可以忽略,增量动态逆控制结构如下图所示:
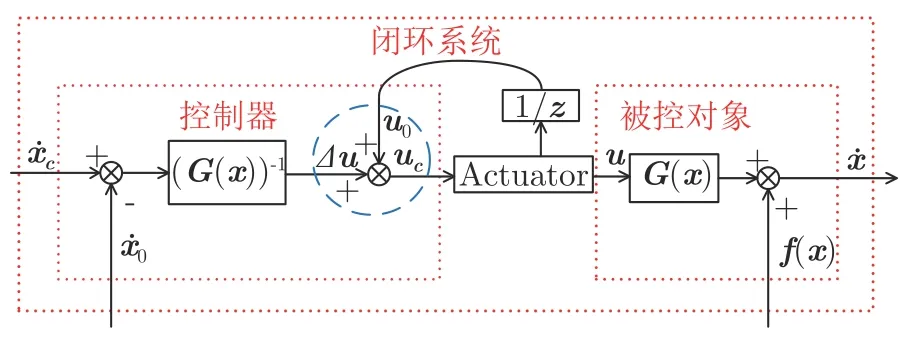
图2 增量动态逆的原理图Fig.2 Schematic diagram of incremental dynamic inversion
依据上面的增量动态逆原理图,有下式成立:

将式(9)代入上式,可以得到
若控制频率足够高,有x0≈x,u0≈u成立,上式可以等价为:

显然此式与常规动态逆一样,说明在满足控制频率足够高这一条件的情况下,执行机构动态特性对最终闭环系统的影响是一样的,都存在一个非线性干扰项.式(12)也从另外一个侧面说明了增量动态逆方法虽然对系统本体模型不确定性或扰动有一定的抑制能力,但是对于高于执行机构带宽的部分并不能有效抑制.
2 非线性影响因素的消除方法
依据上一节的分析,不管是常规动态逆方法还是增量动态逆方法,执行结构的低带宽特性(这是相对的概念)都会导致经非线性反馈后的闭环系统不能等价于一个理想的线性系统,而是有一个非线性干扰项的差异.动态逆方法(包括增量动态逆)的基本思想就是通过非线性反馈形成一个理想的伪线性系统,再在此基础上进行线性系统设计,非线性干扰项的存在使动态逆方法无法获得理想的伪线性系统,因此要使用动态逆方法进行控制律设计,必须消除非线性干扰项.从第1 节的分析结果看,消除非线性项的影响,可以从两个方向入手,一个是通过模型参考自适应方法设计补偿器提高执行机构子系统的带宽,即保证补偿器和执行机构混合系统的等效带宽远高于非线性反馈项f(x)频率,这个与文献[17−18]中的思想类似,另一个思路则是直接在非线性反馈项中引入补偿项,直接对消掉非线性干扰项,下面就这两类方法展开讨论.
2.1 提高等效带宽
参照第1 节的推导结果,若将补偿器和执行机构混合系统的等效带宽设定为远高于非线性反馈项f(x)频率,则采用动态逆控制律(包括增量动态逆)的闭环系统可以表示成:

进一步状态变化率指令相对执行机构带宽而言也是低频量,则上述动态逆控制系统等效为单位阵.补偿器采用一阶模型参考自适应系统实现,如图3所示:

图3 执行机构动态补偿框图Fig.3 Dynamic compensation block diagram of actuator
执行机构的补偿器分为两种形式,一种是执行机构模型已知,另一种是执行机构模型结构已知但参数未知.对于模型已知的情况,和Ku可通过下式得到:

对于模型未知的情况,则需要采用模型参考自适应的方式在线调整参数和Ku,为设计两控制参数的自适应更新律,引入如下引理:
引理 1.考虑两个信号α和φ,它们之间有如下动态关系:

其中,α(t)为标量输出信号,H(p)是严格正实的传递函数,k是符号已知的未知常数,φ(t)是关于时间t的m×1维向量,v(t)是可测量的m×1 维向量.如果向量φ(t)服从如下规律:

γ是正常数.α(t)和φ(t)全局有界,而且,如果v(t)有界,那么当t→∞时,α(t)→0.引理的具体证明过程见文献[19].
记跟踪误差为:

参数误差定义为控制器参数与理想参数的差:

其中理想参数可以表示为如下形式:

根据上图中的补偿原理,umi和ui的动态特性可用下式表示:


将式(18)和式(19)代入上式中,可得到跟踪误差e满足如下微分方程:

上式写成频域形式为:


下面就上述执行机构动态补偿规律,证明整个自适应系统稳定性(包含外面的动态逆环节),具体证明思路是先利用李亚普洛夫方法证明跟踪误差ei有界全局渐近收敛,然后再证明整个闭环动态逆非线性系统的稳定性.在证明之前先做两项假设:
假设 1.函数矩阵G(x)各元素全局有界;
假设 2.设定等效带宽远高于非线性系统频率.
对于假设1,大多数物理系统都能够满足假设1,比如飞行控制系统、机器人系统,对于假设2 则直接与等效带宽方法的思想吻合.
选取如下李亚普洛夫函数:

对李亚普洛夫函数沿系统轨线求导:

将式(22)和式(24)代入上式可以得到:

因此执行机构动态补偿子系统是全局稳定的,即信号ei、都有界,依据Barbalat 引理,可知跟踪误差ei全局渐近收敛.
下面以跟踪误差e有界且全局渐近收敛为基础来证明整个自适应系统的稳定性,根据跟踪误差的定义有下式成立:

参照动态逆控制律有:


参照图3,有下式成立:

将式(30)和式(31)代入式(28)中可得:

参照文中等效带宽思想,即假设2,则上式可以简化为:

根据上面的证明结果可知,跟踪误差e有界且全局渐近收敛,且函数矩阵G(x)各元素全局有界(假设1):

其中D为一正实数,参照上式显然有下列条件成立:

由上式可以得出

因此系统状态x有界,且当e→0时,有x→xc成立.
若采用增量动态逆控制律,则式(16)变为:

式(19)则变为:

由假设2,上式变为:

若增量动态逆控制频率一般都足够高,因此有x0≈x,u0≈u成立,上式可变为:

上式与式(20)相同,因此同样可以证明在增量动态逆控制律的作用下,系统状态x有界,且当e→0时,有x→xc成立.
2.2 直接补偿方法
对于动态逆控制方法,若将非线性反馈项由f(x)改为下式:

即在原来的非线性反馈项之外再补偿一个微分项,再代入式(6),原动态逆闭环系统等效为如下的一阶惯性环节:

对于增量动态逆控制方法,将状态速率反馈项变为:

同样在原来的反馈项之外再补偿一个微分项,代入式(10),则增量动态逆闭环系统同样等效为如式(42)所示的一阶惯性环节.
这种直接补偿方法需要用到微分信号,拟采用韩京清提出的非线性跟踪微分器来实现[20],这种微分器利用二阶最速开关系统跟踪连续输入信号并提取近似微分信号.存在如下形式的二阶系统:
取如下最速控制:

x1可以最快速地跟踪信号v,当x1充分接近v时,x2可以作为信号v的近似微分,形成如下的最速跟踪微分器:

上述的跟踪微分器在进入稳态时容易产生高频颤振,将符号函数 sgn 改为饱和线性函数 sat 也不能完全避免,因此本文中采用如下改进形式的跟踪微分器(为便于实际应用直接给出离散形式):
其中U=fst(x1(k)−v(k),x2(k),r,T),fst最速控制综合函数,具体描述如下:

其中

上式中T为时间间隔,参数r与信号本身频率和噪声频率相关,可依据实际情况选取.
3 仿真验证
采用如下的单入单出的非线性系统为研究对象:

若动态逆的动态指令信号由下式生成:

则对于方法1 (提高等效带宽),补偿后的理想动态特性由如下传递函数表示:

对于方法2 (直接补偿),补偿后的理想动态特性由如下传递函数表示:

3.1 非线性干扰项的影响仿真
首先我们来对采用动态逆控制方法时,因执行机构低带宽导致的非线性干扰项进行仿真验证,具体干扰机理见式(7)和式(12),分别对应常规动态逆方法和增量动态逆方法.仿真时动态逆控制参数和执行机构模型参数分别取为ωc=2 rad/s 和ωa=20 rad/s.对ωn分别取 1 rad/s,10 rad/s ,20 rad/s,由低到高三个值,采用常规的动态逆控制方法进行仿真,图4 是三种情况下f(x)的功率谱密度,图5是不同干扰项的仿真结果,可见当f(x)含有越多高频能量时,实际控制响应与预期的控制响应相差越大.

图4 非线性干扰项 f(x)功率谱密度Fig.4 Power spectral density of nonlinear interference term f(x)

图5 不同干扰影响的仿真结果Fig.5 Simulation results of different interference effects
参照前面的分析,增量动态逆与常规动态逆在不考虑状态速率测量误差和控制频率足够高的情况下,式(7)和式(12)的形式完全一样,即最终的闭环系统是一致的(线性项和非线性干扰项都一样),仿真结果如图6 所示,因此本节不再做增量动态逆控制方法的非线性干扰分析,后面章节中关于非线性干扰项的消除仿真中,只给出常规动态逆的仿真结果.
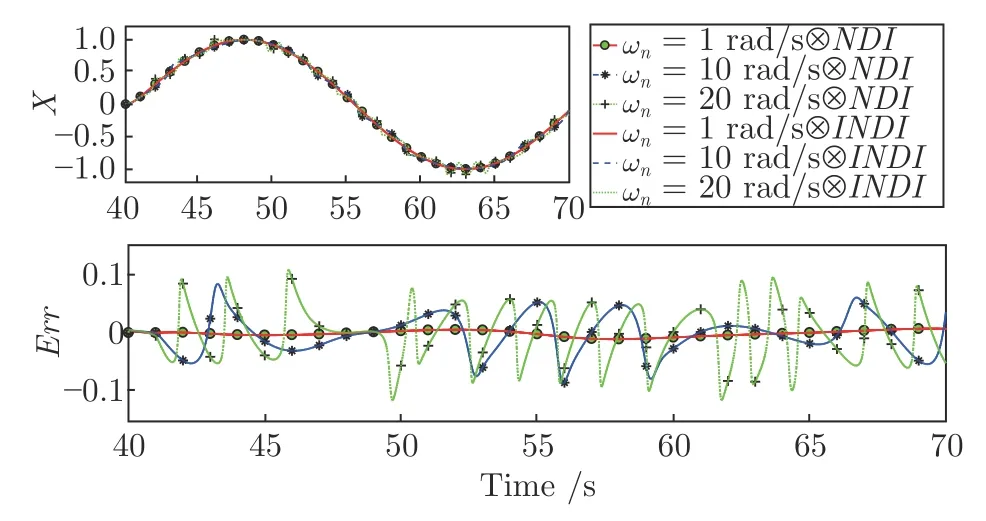
图6 常规和增量动态逆仿真结果Fig.6 Conventional and incremental dynamic inverse simulation results
3.2 提高等效带宽方法仿真验证
本节主要通过仿真对第2.1 节中所提出的非线性干扰抑制方法进行验证,即提高等效带宽方法,首先考虑如下三种情况的仿真:Case1、Case2和Case3 对应的等效带宽 (ωam)为20 rad/s、40 rad/s 和100 rad/s,其他仿真参数为ωc=2 rad/s、ωn=20 rad/s、ωa=20 rad/s.
从图7 的仿真结果看,当等效带宽取为20 rad/s时,非线性干扰项的影响完全无抑制,40 rad/s 时,跟踪误差减小,而等效带宽为 100 rad/s 时,系统状态与预期响应 −Expect基本一致,可以认为非线性干扰项的影响得到了很好的抑制.

图7 等效带宽方法仿真结果(ωa 已知)Fig.7 Simulation results of equivalent bandwidth method (ωa Known)
对于ωa未知的情况,考虑如下四种情况的仿真:Case4、Case5、Case6和Case7,其中Case4和Case6对应的ωa=10 rad/s,Case5和Case7 对应的ωa=30 rad/s,Case4和Case5 没有引入等效带宽方法,Case6和Case7则是在ωa未知的情况下,引入模型参考自适应控制(Model reference adaptive control,MRAC)方法来提高执行机构的带宽,其他仿真参数为ωc=2 rad/s、ωn= 20 rad/s、ωam=100 rad/s.
从图8 的仿真结果看,对于相同的ωn,未实施提高等效带宽措施的情况下,越小的ωa的非线性干扰影响越大,而引入模型参考自适应方法后,Case6和Case7的系统状态与预期响应−Expect基本一致.
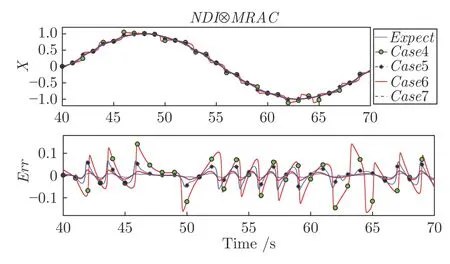
图8 等效带宽方法仿真结果(ωa 未知)Fig.8 Simulation results of equivalent bandwidth method (ωa unknown)
3.3 直接补偿方法仿真验证
本节主要通过仿真对第2.2 节中所提出的非线性干扰抑制方法进行验证.通过修正非线性反馈项(Modified nonlinear feedback,MNF)的方式,对非线性干扰项直接进行补偿,补偿过程需要用到f(x)项的微分信号,鉴于微分过程对噪声有放大效应,因此除考虑各反馈信号无测量误差的情况外,还考虑了测量噪声对非线性干扰项补偿效果的影响.首先考虑无噪声,状态速率和f(x)项的微分信号都采用实际值,采用两种仿真状态进行对比,Case1和Case2 ,仿真参数为ωc=2 rad/s、ωn=20 rad/s、ωa=20 rad/s,其中Case1 没有对非线性干扰项进行补偿,Case2 则采用修正非线性反馈项的方式对非线性干扰性进行补偿.从图9 的仿真结果看,修正非线性反馈项方式可以很好地消除非线性干扰项影响.
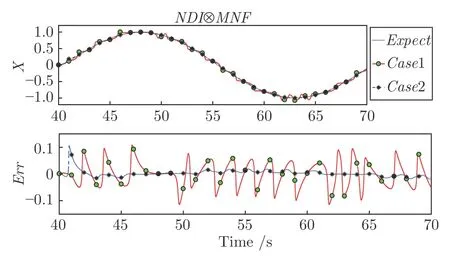
图9 直接补偿方法仿真结果(不考虑噪声)Fig.9 Simulation results of direct compensation method (Without consideration of noise)
上述方法虽然可以较好地消除非线性干扰项,但是由于状态变化率通常不能直接测得,在获取f(x)项微分信号过程中需要用到的状态变化率是通过状态测量信号微分得到,具体方法是第2.2 节中的非线性跟踪微分器,依据文献[20],在采样频率足够高的情况下,跟踪微分器的带宽与速度因子r的关系如下:

因此在反馈信号有用信息尽可能保留的同时,滤掉更多高频噪声,确保微分信号相对平滑.仿真分四种情况,Case3、Case4、Case5和Case6,仿真参数为ωc=2 rad/s、ωn=20 rad/s 、ωa=20 rad/s,不同的是Case3和Case5 虽然引入了跟踪滤波器,但信号无噪声,Case4和Case6则引入了标准差σ=0.01、均值µ=0的高斯白噪声,Case3和Case4 跟踪滤波器的速度因子r=30,而Case5和Case6 则取为r=100.
从图10 的仿真结果看,基于跟踪微分器的直接补偿方法很好地消除了非线性干扰项的影响,测量噪声的存在只是略微增加了控制误差,较低的跟踪滤波器带宽 (r=30)由于滤掉了部分有用信息,控制误差相对较大,较大的r则完全保留了反馈信号的有用信息,补偿效果较好,但是会使过多测量噪声进入到反馈信号中,增加执行机构负担,所以实际使用过程中依据情况选择一个居中合理值.

图10 直接补偿方法仿真结果(考虑噪声)Fig.10 Simulation results of direct compensation method (With consieration of noise)
4 结论
本文针对非线性动态逆控制中较低执行机构带宽导致的非线性干扰项,从非线性干扰项的影响机理出发,提出了两类消除非线性干扰项的方法,并通过仿真进行了验证.不管是提高等效带宽方法还是直接补偿方法,都能较好地消除非线性干扰,两者不同之处在于,直接补偿方法是精确的消除了上面的非线性影响,而提高等效带宽方法则是一个近似方法.直接补偿方法需要用到f(x)项的微分信号,可通过非线性跟踪微分器得到,只是这类方法严格依赖于系统模型和执行机构模型.提高等效带宽的方法则在执行机构模型未知的情况,可引入模型参考自适应方法来克服模型不确定性.
