大型激光陀螺仪的研究进展
2021-07-23翟二江郭文阁徐学东全秋叶张立松刘师彤魏明明
翟二江,郭文阁,徐学东,全秋叶,张立松,刘师彤,魏明明
(1.西安石油大学理学院,陕西 西安 710065;2.中国科学院国家授时中心时频基准实验室,陕西 西安 710600)
1 引 言
大型激光陀螺仪是精确监测地球自转角度速度的传感器[1]。相比于惯性导航的激光陀螺仪通常的面积小于0.02 m2,对应的周长小于0.3 m,最佳灵敏度约为5.7×10-7rad/(s·Hz1/2),性能水平足以满足惯性导航要求,但对大多数地球物理应用来说,还差几个数量级。大型的光纤陀螺仪也可以作为测量角速度的仪器,美国的霍尼韦尔公司生产的光纤陀螺仪在恒温条件下,利用闭锁控制技术,使用光纤长度为3 km的光纤陀螺测量精度达到1×10-9rad/s,在进行温度补偿可以达到10-10rad/s,需要考虑温度梯度效应的影响,使用环境苛刻,同时测量精度也不足以满足超高精度测量的需求[2]。由于标度因子和灵敏度随两束反向传播的激光束所包围的区域增加,优化标度因子是激光陀螺仪传感器进行改进的合理途径。事实证明,研究大型激光陀螺仪设计方案是可行的。
目前国内外研究用于测量地球参数的技术主要利用甚长基线干涉测量法(Very Long Baseline Interfermetry,VLBI)、卫星定轨测距法、月球激光测距法、多普勒轨道法等空间大地测量技术对EOP进行监测[3]。这些测量技术都与地球旋转轴没有直接联系,VLBI技术通过构建模型与地球旋转轴相连,最终精度尚不清楚。大型激光陀螺仪安装在地球表面,是直接参照地球旋转轴的空间大地测量装置。大型激光陀螺仪的测量精度和稳定性能够测量地球旋转轴发生的微小变化量,目前国内外设计的大型激光陀螺仪光学腔的面积从0.748 m2到367.5 m2,测量灵敏度从7.2×10-10rad/s到4.7×10-12rad/s[4]。本文主要对国内外的大型激光陀螺仪发展和应用状况进行简要介绍,以及影响大型激光陀螺仪精度的原因和改进方法。
2 大型激光陀螺仪设计方案
2.1 基本原理
大型激光陀螺的基本工作原理是依托于Sagnac效应的[5]。如图1所示,在闭合的光学环路中,将两束相向传播的光波从该环路中任意一点出发,各自环形一周。令闭合光路相对于惯性坐标系沿某一方向转动,则两束光会出现干涉现象。由于光速的不变性,两束光到达新的光源位置所用的时间不同。
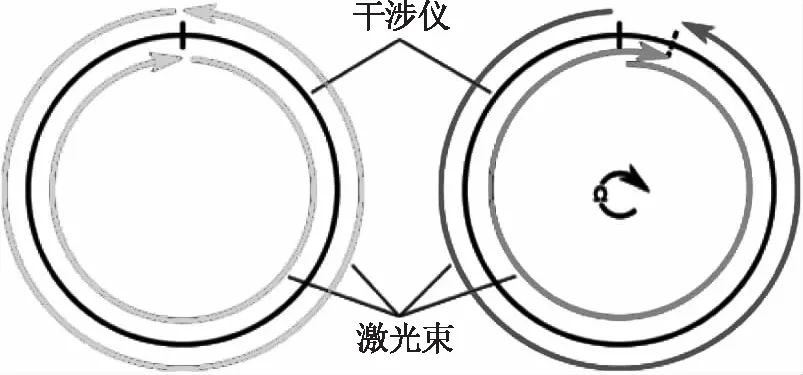
图1 Sagnac效应的基本原理
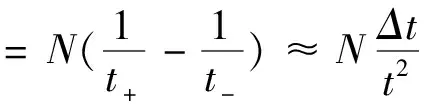
光束在顺时针和逆时针方向传输所用的时间,同时可得时间差:
(1)
因为c2≪(ΩR)2,故可以忽略(ΩR)2的取值,得到(2)式:
(2)
(3)
2.2 结构设计
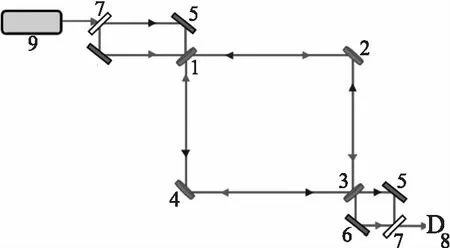
根据大型激光陀螺仪的工作原理,目前主要设计的方案分为主动式和被动式大型激光陀螺仪[6]。如图2所示,为主动式激光陀螺仪。主动式激光陀螺仪环形腔内部有增益介质,实质上是双向输出激光束的激光器,国际上采用波长为633 nm的He-Ne激光。采用四个不锈钢或者耐热玻璃制成的环形回路,四个角分别放置高反射镜,将激光束锁定在环形腔两个方向的共振模式上,最后探测输出信号。
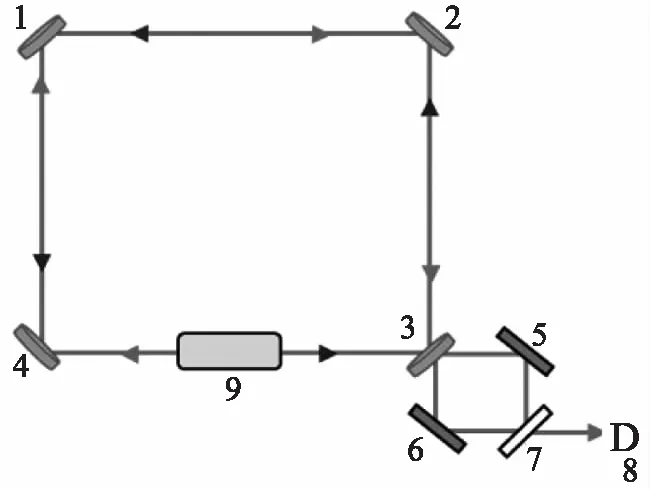
(1~4反射镜、5~6平面镜、7强度分束器、8光电探测器、9激光增益)
被动式陀螺仪环形腔内没有增益介质,由外部注入激光后分别锁定到环形腔传输的两个方向的共振模式上。如图3所示,为被动式激光陀螺仪。
(1~4反射镜、5~6平面镜、7强度分束器、8光电探测器、9激光器)
主动式激光陀螺仪结构相对简单,在设计中可以避免高精细度光学腔模式以及激光反馈锁定等复杂问题,得到在具体实际应用中的设计,如在新西兰设计建造的主动式大型激光陀螺仪C-I、C-II、G0、UG-1、UG-2和UG-3等。
但是当陀螺仪环形腔长达米量级以后,过窄的自由光谱区频率间隔远小于增益介质的增益宽带,导致激光模式出现干扰,为了避免模式干扰影响陀螺仪的测量精度,主动式大型激光陀螺仪适用于较低的光功率条件下。被动式大型激光陀螺仪不设计增益介质,可以运行在较强的光束状态下,对提升测量灵敏度的发展具有潜力,如MIT-1977、MIT-1981、USAFA-1988、Caltech均为被动式大型激光陀螺仪。
2.3 关键技术
2.3.1 高Q值Sagnac干涉仪
品质因数Q是环形腔最重要的指标之一,表示环形腔局域内部耦合光子能量的能力大小。在高Q值环形腔的耦合体系中,微小的谐振频差即可产生较大的可检测信号,Q值影响着谐振腔的检测灵敏度。Q值的表达式为:
(4)
其中,w为环形腔的频率;W是腔内存储的光能总量;P为光子能力在单位时间内的损耗;用dW/dt来表示;τ代表光子寿命,也就是环形腔内单个光子的存储时间,目前主要是从环形腔的材料、结构设计以及加工工艺上面提高环形腔的品质因数[7]。
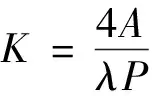
2.3.2 尺度因子的稳定
目前影响尺度因子稳定性的因素主要来源于多个方面,环形腔体的形变量、增益介质的波动等均会影响尺度因子的稳定性,在第5节提供具体的解决方案。
2.3.3 后向散射效应
散射光引起的模式间的耦合,主要干扰源来自反射镜的缺陷以及表面的微尘颗粒所影响。激光束产生散射现象,针对此次影响,在第5节中提供具体的处理方案。
3 大型激光陀螺仪的发展历程
20世纪中期,国外已经开始研究大型激光陀螺Sagnac效应的应用范围,主要用于地球科学领域。
1993年,德国慕尼黑大学Schreiber教授和新西兰的学者设计建造大型激光陀螺,用于测量地球潮汐、地轴倾斜角等。1998年,在德国Wettzell天文观测站设计了一个大型激光陀螺仪—G-ring[5],如图4(a)所示G-ring大型激光陀螺仪的平面结构,环形腔的面积16m2,腔的品质因数Q=3.5×1012,测得地球自转灵敏度约10-9,并且测量定日长(Length Of Day,LOD)精度可以达到0.13 ms。
2005年,在美国的Southern California建造的大型激光陀螺—GEOsensor[9-10],如图4(b)所示GEOsensor大型激光陀螺仪平面结构,尺寸规格为1.6×1.6m2,测量灵敏度噪声1.08×10-10rad/(s·Hz1/2),主要用于监测地震引起的地球参数波动,并开展用于大地科学方面的研究。
2014年,在意大利建造的大型激光陀螺仪—GP2[8],如图4(c)所示为GP2大型激光陀螺仪平面结构,环形腔的面积2.56 m2,不锈钢体结构,腔的品质因数Q=4.6×1011,测得拍频差Δf=184 Hz,采用波长633 nm的He-Ne激光束。目前此陀螺处于调试转态,后期将应用在地球科学领域。
2014年,意大利的研究团队设计了建造大型激光陀螺仪—GINGERino[9],如图4(e)GINGERino大型激光陀螺仪模型结构,腔体为正四面体结构,环形腔的面积12.96 m2,在400 s的积分时间下精度可达3.2×10-11rad/s。在2017年,自动运行情况下,经过持续采集数天的测量数据,得到地震宽带的功率谱密度为10-10rad/(s·Hz1/2),最大分辨率为3×10-11rad/s。该陀螺仪的优点是可以同时在不同方向上测量到地球自转角速度的分量,从而可以综合不同方向上的分量测量结果最终得出地球自转角速度矢量的变化。
2019年,华中科技大学开展了大型激光陀螺仪的研究,设计1 m×1 m大型激光陀螺仪原样机[10],如图4(d)所示为1 m×1 m的大型激光陀螺仪平台搭建。该激光陀螺经过不断的调试完善,目前仪器的测量灵敏度噪声已降低至2.9×10-9rad/(s·Hz1/2),并在2000 s累计积分下,精度可达到了2.9×10-9rad/s。当前该激光陀螺仪主要用于开展地球物理效应探测等研究工作。
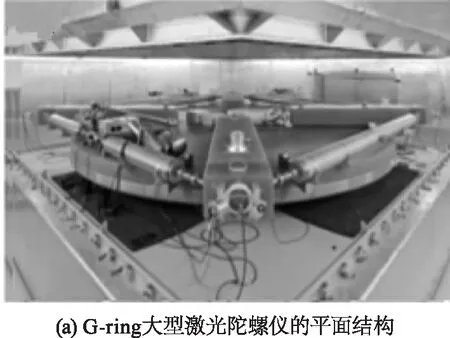
图4 各种大型激光陀螺仪
目前世界上设计的大型激光陀螺仪情况如表1所示。
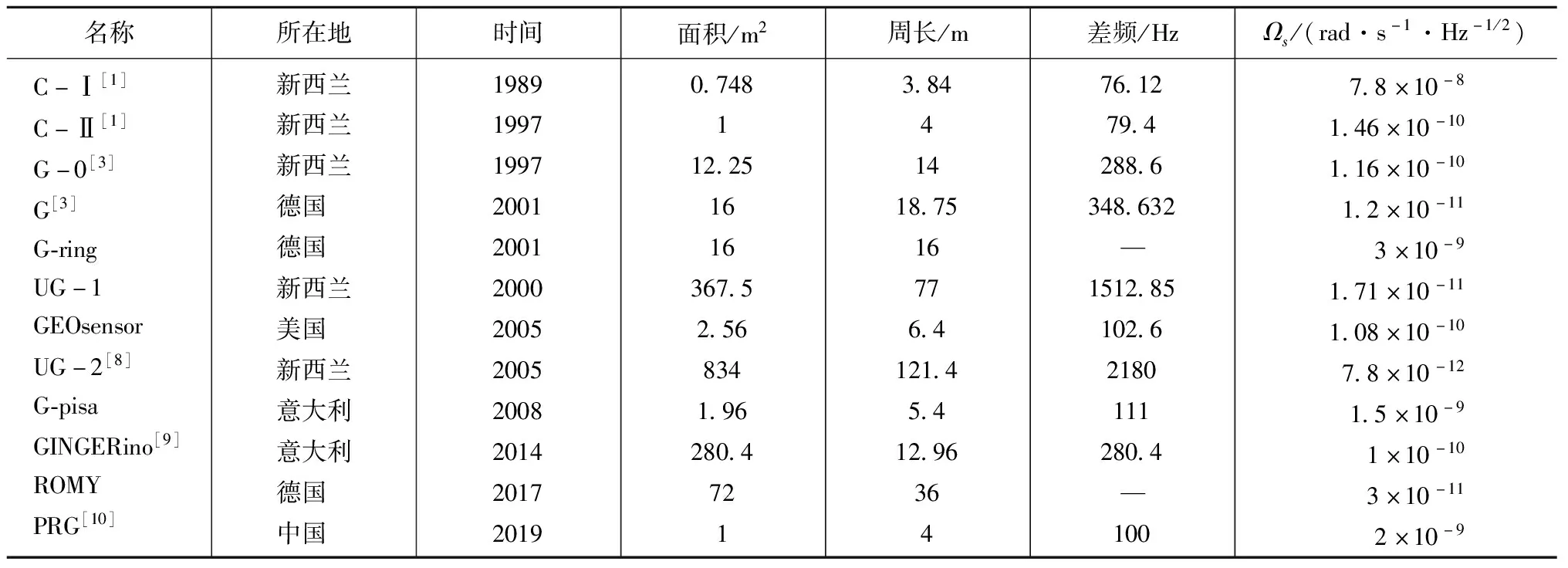
表1 世界各国大型激光陀螺仪
4 大型激光陀螺仪在测量地球参数(EOP)中的应用
大型激光陀螺仪通过测量地球自转产生的Sagnac效应,然后经过对陀螺仪测量的输出信号进行解调,即可解算出地球自转瞬时速度。利用光学陀螺仪精确测量地球自转目前已经广泛应用于地球固体潮观测、旋转地震波探测、引力磁效应等科学研究领域。
目前德国在Wettzel天文观测站设计建造的 4 m×4 m的大型激光陀螺仪—G-ring[11],在现阶段属于稳定性最好的大型激光陀螺仪,角速度测量精度达到2×10-13rad/s,经过解算后得到UT1的测量精度可以进入0.1 ms/day的范围。
在意大利中部的萨索国际地下实验室设计的大型激光陀螺仪—GINGERino[12],在无人值守的情况下,连续采集数天的测量数据,得到地震带宽的功率谱密度为10-10rad/(s·Hz1/2),最大分辨率为3×10-11rad/s,可分析地球转动信号和平移信号之间的相关性。
5 面临的问题以及解决办法
大型激光陀螺仪环形腔增大必然会带来一些问题。环形腔体的几何形变对尺度因子的影响,环形腔受到外界因素(温度、应力)的影响,导致腔体出现不同程度的非线性形变。目前工程上的解决办法是控制环形腔对角线法,进而监测腔体的几何形变。在环形腔的对角线上设计FP谐振腔,通过检测谐振腔内光信号的频率差来判断对角线长度是否发生变化。当对角线长度发生改变时,可根据检测到的变化信号计算对角线变化的准确长度,进而判断环形腔的变化情况,从而对陀螺仪的几何形状进行调整,以稳定标度因数。
除此以外优化几何形变对尺度因子的影响常用的方法有三类:
(1)科学设计结构、建立最优的外形结构并合理地使用热膨胀变化量少的材料,减少温度对灵敏度的影响。例如微晶玻璃和非洲花岗岩等。
(2)通过理论模型以及实验验证分析,建立大型激光陀螺的静动态温度补偿模型,进行优化补偿。
(3)控制陀螺仪的使用环境,使陀螺仪工作在外界因素影响不明显或者无人为干扰的环境中。
在理想情况下,腔内反向传播的光束是绝对独立的。由于腔镜的缺陷产生后向散射,从而导致两束光之间存在耦合,采用校正的方法也是针对高反射镜开展。
通常抑制后向散射效应对激光光束影响的常用方法有以下几种:
(1)从工艺上考虑,采用超高反射率(99.999 %)的反射镜。
(2)采用离子束溅射(IBS)技术对反射镜进行镀膜,其中涂的高反射介质膜沉积在超抛光衬底(熔融石英)上,大幅度提高了反射能力。IBS技术沉积工艺制备的镜面涂层附着力好,杂质少,吸收损失小。IBS技术已成为生产高精度光学测量所需的高反射镜的涂层方法。
(3)从操作上考虑,采用工作波长更长的激光束。理论上,当瑞利散射和激光波长存在一定相关性的条件下,后向散射振幅将大大降低。在较长波长的大型环形激光陀螺仪中,可以预期改善大型激光陀螺仪测量精度的性能。
6 总 结
目前大型激光陀螺仪成功的应用于测量EOP,成为实现高精度测量UT1的重要技术手段。近几年,国内积极开展大量研究工作在光学陀螺仪的理论及应用方面,并取得很好的成果,但是满足高精度的应用于地球科学需要加大应用研究的力度和深度。虽然到目前为止,优化几何形变、抑制后向散射效应,为提高灵敏度带来了可能性。随着科学技术的发展,大型激光陀螺仪需要进一步提高应用研究水平,以满足高精度测量地球角速度、日长变化以及月地间测量等方面涉及更多的应用。
