重载开启桥多点驱动系统的同步性研究
2021-07-23施力可戴松贵
施力可,戴松贵
(宁波梅山岛开发投资有限公司,浙江 宁波 315832)
0 引言
宁波红桥的下层桥架重达1200t,悬挂于主桥下方,采用多点驱动系统实现水平开启和闭合。由于机械结构、受力状态和经济性等多种原因,需要在移动桥架上安装多台电机[1,2],用于共同驱动机械系统的负载,这种传动系统通常称为多点驱动系统[3,4]。
由于电机结构和特性上不可避免的差异性,即使使用相同品牌和相同型号的电机,每台电机的实际转速都不可能绝对相同。在实际工作时,多点驱动传动系统中电机的负载情况是不一样的。这种电机输出功率上的不平衡,会影响系统驱动能力的正常发挥,严重时会导致电机过载、烧毁等一系列问题的出现,引起机械系统的其它故障,使生产系统无法正常运行。因此,在多点驱动时必须保证电机的实际转速能实时控制调节,保证各电机转速保持一致。
本文针对重载开启桥的多点同步驱动系统,提出了重载开启桥多点驱动系统的设计方案和同步控制算法,开发了实时网络控制系统,通过计算机控制、传感及变频技术,实现多点驱动的同步控制,并进行了实际测试。
1 重载开启桥多点驱动系统
如图1所示,下层移动桥架悬挂于主桥下方,通过驱动机构实现水平方向的开启与闭合。
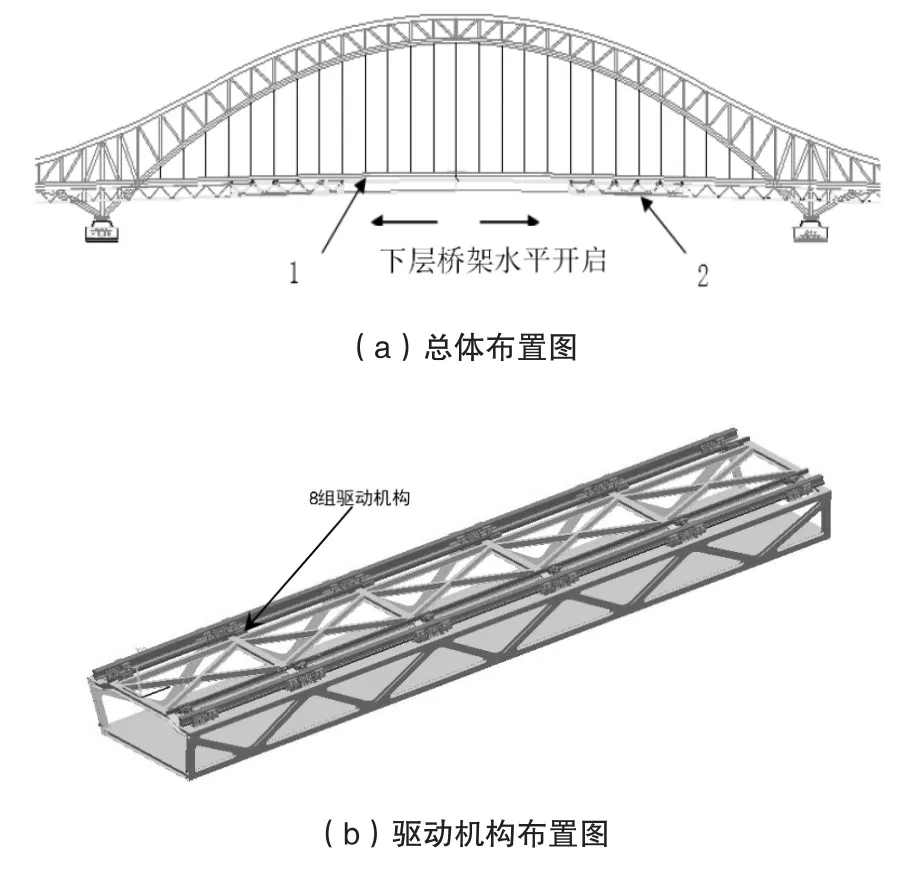
图1 宁波红桥布置图Fig.1 Layout of Ningbo Red Bridge
驱动机构主要由驱动轨道和链驱动装置组成。链驱动装置采用“电机+直角行星减速器+链传动”方式;驱动轨道与上部固定结构连接,链驱动装置与下部移动桥架采用销轴连接,且挂在驱动轨道上。
如图2所示,链驱动装置采用了悬挂在驱动轨道上,与下部移动桥架采用销轴连接的安装方式。其作用是限制了其水平面内与移动桥架的自由度,但允许其竖向与移动桥架之间的自由度,从而确保移动桥架整体±25mm的上下调整量。 链驱动装置上的水平导向轮和销轴除保证链传动啮合的精度与自适应之外,还主要用于承受移动桥架的侧向载荷(风载荷)。
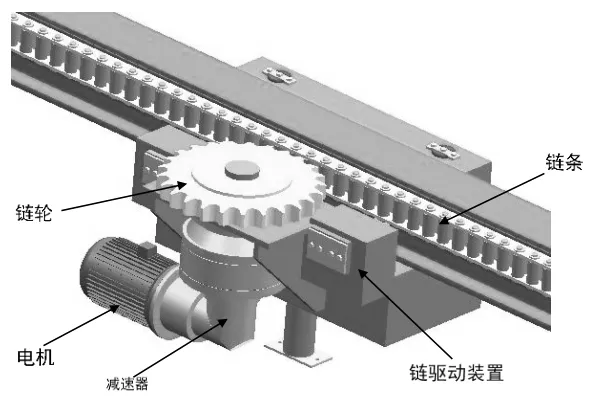
图2 驱动机构Fig.2 Driving mechanism
2 多点驱动系统的同步控制算法
在多电机传动链同步驱动系统中,各电机一般通过减速机构与传动链进行机械连接,各电机的同步要求比独立电机同步驱动严格得多。但由于电机之间存在柔性连接,因而不能仅以各电机的速度反馈信号为同步控制依据。更要引入各电机的负荷大小进行负荷均衡控制,以达到真正的同步传动。因为在传动链运动过程中,各传动电机实际上或主动或被动地都处于同一转速下运行,能够迅速、准确反映各电机同步状态的信息主要是各电机的负载电流。当某电机的转速较其它同步运行电机转速快时,其负载电流必加大,反之负载必减小。此外,柔性连接的多驱动电机之间存在着严重的耦合关系,当某台电机的转速降低时,该电机在系统中不仅失去了拖动作用,还要作为负载被传动链上其它电机拖着同步运转,这导致其它电机的负载立即加重。因此,对这类柔性连接同步驱动的多台电机,其控制原则应是以电机运行转速信息为参考,以电机的负载电流信息为依据。
单侧桥架布置12个电机,驱动桥架时只需其中8个电机,其他4个为备用电机。电机通过直角行星减速器及链传动方式驱动桥架同步开启和闭合,此驱动系统为柔性连接电机同步驱动控制系统。因而,不能仅以各电机的速度反馈信号为同步控制依据,更要引入各电机的负荷大小进行负荷均衡控制,以达到真正的同步传动。以同步控制两个电机为例,描述此柔性连接同步驱动系统,其控制框图如图3所示。

图3 双级柔性连接同步控制系统Fig.3 Two stage flexible connection synchronous control system
在控制系统中,uR为速度给定,由转速反馈构成闭环稳速控制,速度控制输出为udj(j=1,2),同步控制主要靠电流反馈进行负荷均衡补偿。第k时刻负荷均衡补偿量uij,按下式计算:

式(1)中,kj为补偿系数,由现场工艺决定,i1(k),i2(k)为两驱动电机的反馈电流,计算系数cj(k),dj(k)按下式计算:
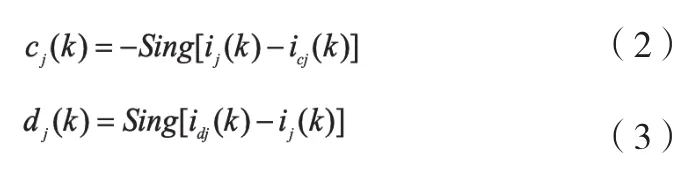
式中,Sing(x)为符号函数,其定义为:

icj(k)和idj(k)按下式计算:

式中,Δi为驱动电机的负载允许工作带宽。
由于驱动下层桥架的12个电机为柔性同步驱动,依据上述双级柔性电机驱动同步控制方式,驱动电机同步控制框图如图4所示,以变频器的电流反馈构成负荷均衡补偿环节。
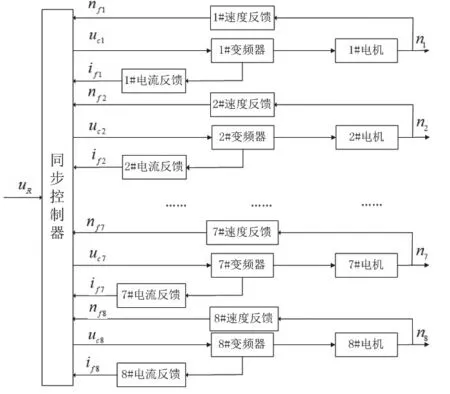
图4 多点驱动电机同步控制框图Fig.4 Synchronous control block diagram of multipoint drive motor
采用前述的柔性连接多级电机同步控制方案,在测速方法上,采用T法与M法相结合切换测速,以达到较高精度的速度测量,即在低速时采用T法,测取旋转编码器两相邻脉冲之间的时间计算电机旋转速度,在高速时采用M法测速,在相等的时间间隔内测取脉冲个数计算转速。
系统的速度控制采用常规PID算法,同步驱动控制算法为:

其中,ucj(k)为第j台电机变频器控制输入;a分别为比例因子,积分因子和微分因子;e(k)、e(k-1)和e(k-2)为第k,k-1次和k-2时刻8个驱动电机转速与给定转速的差,unj(k)为第j台电机负荷均衡补偿量,按式(1)~式(6)计算。
3 多点驱动系统的同步控制算法
多点驱动系统的电控系统通过计算机控制、传感及变频技术,实现多点驱动的同步控制。电控系统是基于CAN总线组建实时网络控制系统和基于TCP/IP组建实时网络控制系统,其电控系统框图如图5所示。
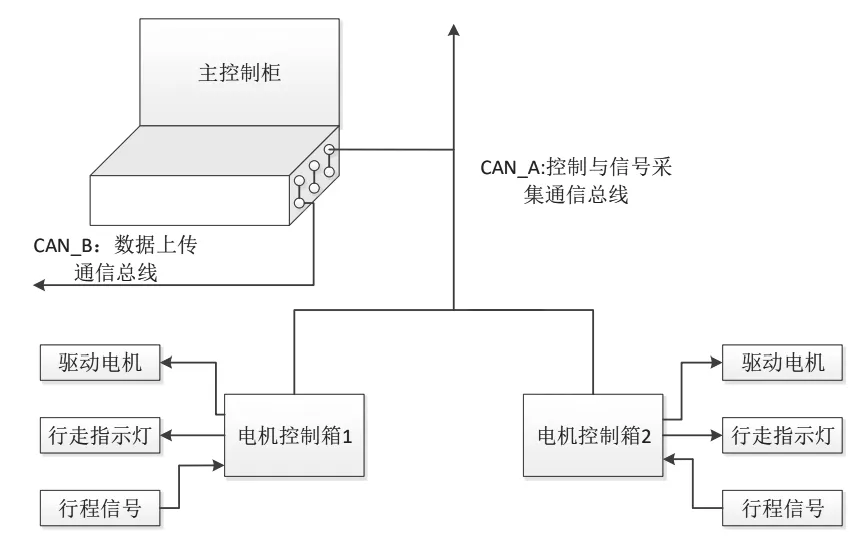
图5 电控系统框图Fig.5 Block diagram of electric control system
基于CAN总线组建的实时网络控制系统由主控制柜、泵站控制系统、电机控制系统组成。
主控制柜是实时网络控制系统的核心,其通过CAN_A端口与泵站控制系统和电机控制系统通信,发送控制数据给泵站和电机控制箱,并接收泵站和电机控制箱反馈的数据;通过CAN_B端口与计算机通信,发送状态数据给计算机。
泵站控制系统一方面作为驱动单元,根据控制数据控制电磁阀状态,从而控制油缸动作;另一方面作为信号采集单元,采集移动桥架开启到位信号、关闭到位信号、插销到位信号、锁定到位信号和悬挂油缸的载荷信号,并将这些信号通过CAN_A端口发送给主控制柜。
电机控制系统一方面作为驱动单元,其根据控制数据控制变频器状态,从而控制电机运动,并在电机工作过程中驱动警示灯达到安全警示作用;另一方面作为信号采集单元,采集电机的运行行程信号,并通过CAN_A端口发送给主控制柜。
基于TCP/IP组建的实时网络监测系统由摄像头组和计算机组成。
摄像头组用于监测关键位置,实现监控可视化。
计算机一方面通过USB端口读取USB-CAN模块所接收的控制系统数据并进行实时显示;另一方面通过网络端口接收图像数据并进行显示。
上述电控系统具备以下安全保护:
1)供电保障:采用市电和柴油发电机组共同供电,ATS切换,保证电源供应。
2)电机驱动:采用变频调速和工频调速并联工作,若变频调速出现故障,手动操作50Hz电源直接驱动桥架运行。
3)电机停止:一方面将限位开关常闭触点接入电机驱动回路中,当限位开关生效时,电机驱动回路断电,电机停止;另一方面将限位开关常开触点接入控制器,当限位开关生效时,控制器断开电机驱动回路中的某个触点,电机停止。
4)电气互锁:若处于锁定工况,则驱动机构无效;为防止某个限位开关损坏,引起的误判断,并联安装多个限位开关。
5)声光警示:安装多个声光报警灯,桥架移动时进行声光警示。
6)多重限位:在两端终点处安装多重限位开关,当靠近时,分级先减速后停止。
7)通信保护:实时检测控制系统的通信状态,出现通信故障时停机并报警。
4 多点驱动系统的实际运行
在桥架开启时,悬挂油缸承受桥架恒重,由于液压系统的泄漏、执行元件的非线性摩擦阻力、控制元件和系统的制造误差等因素,系统的同步性能将受到影响。本文进行了下层桥架多点驱动系统的安装和测试,如图6所示。

图6 驱动系统试验Fig.6 Driving system test
测试结果表明:
1)驱动机构沿轨道行走时平稳无障碍,齿轮链条啮合正常,无异常响声。
2) 驱动机构与活动桥架连接后,行走状态时每对齿轮链条处于承载状态。
3)驱动机构的导向装置能够有效防止驱动机构或齿轮与链条脱离啮合,限制齿轮的轴向和径向运动。
4)8个点位同时驱动时,同步精度可保持在1mm以内。
5 结论
本文提出了重载开启桥多点驱动系统的设计方案移动桥架,实现重载开启系统的水平驱动与侧向承载,并具有整体的上下调整余量和自适应特征。设计开发了重载开启桥多点驱动系统的同步控制算法和电控系统,通过计算机控制、传感及变频技术,实现多点驱动的同步控制。测试结果表明,驱动机构沿轨道行走时平稳无障碍,能按预期实现移动桥架的开启与闭合;8个点位同时驱动时,同步精度可保持在1mm以内。
