应力棒法在白鹤滩电站1 000 MW转轮静平衡试验中的改进
2021-07-23刘腾彬王智民
郑 璇,刘腾彬,王智民
(1.中国长江电力股份有限公司,湖北 宜昌 443000;2. 东方电气集团东方电机有限公司,四川 德阳 618000)
白鹤滩左右岸电站共安装16台单机容量为1 000 MW 的巨型混流式水轮发电机组。转轮是水轮发电机组的核心部件之一,随着现场安装测量技术的发展,机组水平度差、轴线不正及导轴承不同心等问题基本得到解决,转轮质量偏心是目前引起机组机械不平衡的首要原因[1],转轮的制造质量直接决定机组的安全稳定运行。受运输条件限制,白鹤滩水电站转轮在工地现场进行制造。根据相关规程规定,转轮出厂前或经过检修大量补焊后,需要对转轮进行静平衡试验[2-3]。静平衡方法是一种通过在旋转体上去除材料或增加配重的静平衡试验方法,目的是完成不平衡点的检测及配重等工作,减小转轮质量偏心,最大程度地消除水轮机转轮质心与水轮机转轴形状中心之间的距离,使不平衡量引起的振动减小到容许范围内,实现设备的可靠运行[4]。本文介绍了应力棒法在白鹤滩左岸电站东电机组转轮静平衡中的试验原理、试验方法及改进措施。
1 应力棒平衡装置及平衡原理
应力棒静平衡装置如图1所示[5],在平衡支柱的顶端放置应力棒,应力棒上部放置托板,转轮放在托板上采用机械把合的方式与托板连接,平衡时转轮的重量由托板传递给应力棒→支柱→基础。通过应力棒内应力的变化,将力学量转换成电量。当应力棒受力变形时,紧贴的电阻应变片的电阻也随之发生改变,电阻变化量由应变仪测出,进而得到所测部位的应变,以此确定转轮的不平衡力矩与偏心角度。

图1 应力棒式静平衡方法装置图
应力棒k值由下式得出
k=ε·k1=λ·10-6·k1
式中:λ为电桥的补偿系统(测杆实际承受的应变);ε为测杆微应变值(读数仪器单位补偿系数);k1=1/4Eπr3(E为材料弹性模量;r为应力棒半径)。
应变仪采用半桥法测量,贴在应力棒上的4个互成90°位置的应变片分别为R1、R2和R3、R4,将R1和R2联成一组,同理R3和R4联成一组,将R1、R2和R3、R4接入应变仪输入端,R2应和R1受力状态相反,R3和R4受力状态相反(如图2所示)。
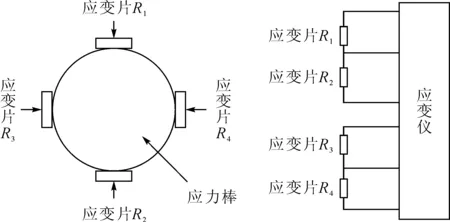
图2 应变片与应变仪的接线图
根据下面公式计算不平衡重量及不平衡重位置:

不平衡角度α=arctgB/A
式中,A、B为应变仪两个通道读数。
2 修正系数引入和校核试验
白鹤滩左岸东电机组某台转轮粗平衡后试验结果见表1。
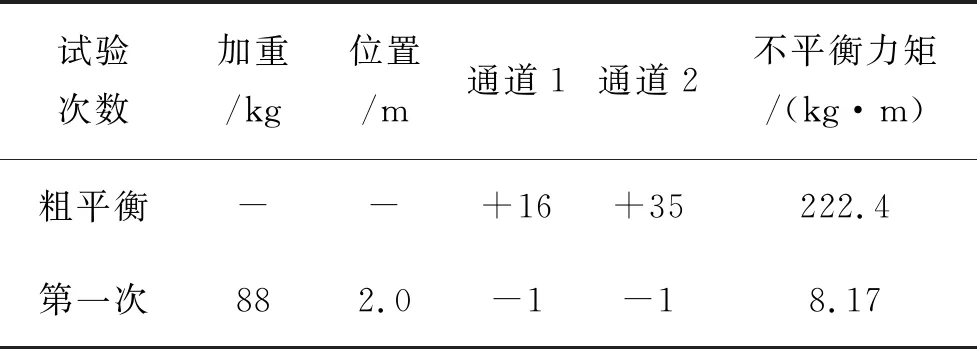
表1 粗平衡试验结果表
粗平衡过程中发现,配重产生的力矩约176 kg·m,配重前不平衡力矩约222.4 kg·m,两者存在一定偏差。
经过分析研究发现,以往的应力棒平衡计算方式仅考虑了转轮理论重心与实际重心偏移量产生的质量距。该计算方法适用于转轮重心与应力棒高度差较小的转轮平衡。对于白鹤滩转轮,转轮理论重心距应力棒平面高度约为应力棒自身长度的3倍,在不平衡状态下,重心高度本身也会对应力棒产生质量距。理论计算结果与实际配重存在一定误差,在白鹤滩左岸电站东电转轮静平衡前需引入修正系数k′。
应力棒挠度
W棒=FL3/3EI=ML2/3EI
式中:M为不平衡力矩;L为应力棒长度;E为材料棒弹性模量;I为截面惯性矩。
转轮挠度(重心位置)
W心=2H(W棒-W棒1/2)/L
式中:H为转轮重心距应力棒下平面距离;W棒为应力棒全长挠度;W棒1/2为应力棒半长挠度。
重心挠度增加的不平衡力矩
M扰=GW心
式中:G为转轮重量。
因重心挠度增加的不平衡力矩比例
η=M扰/(M-M扰)=19.6%
平衡系统不平衡力矩修正系数
k′=1/(1+η)=0.83
白鹤滩转轮不平衡力矩计算公式
上述计算过程将应力棒状态理想化,考虑把合螺栓,k值修正系数应为0.8~0.83。
对此台转轮进行k′的校核试验。试验结果见表2。

表2 修正系数校核试验表

引入修正系数后,此台转轮静平衡试验结果如表3。
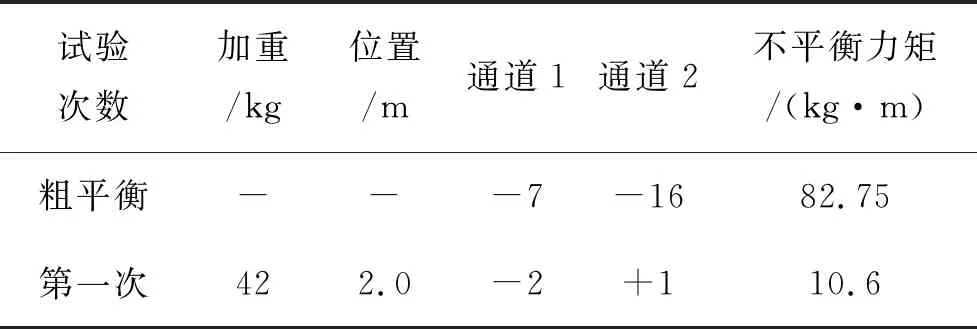
表3 静平衡试验结果表
由表3可知,理论不平衡力矩与配重产生的力矩基本一致。说明采用修正系数后,理论不平衡重量与实际配重基本一致。
3 结 语
随着国内水电机组单机容量迈入百万级,转轮的制造精度和标准也逐步提高[6]。白鹤滩左岸电站1 000 MW 转轮重心高,通过引入修正系数后,提高了静平衡试验精度,进一步满足了精品转轮制造要求。应力棒法的改进应用对于大型转轮的生产制造具有积极的指导意义。
