机械式停车设备人员误入联动报警系统*
2021-07-21张慎如周前飞
张慎如 周前飞
南京市特种设备安全监督检验研究院 南京 210000
0 引言
随着机械式停车设备的普及,与之相关的事故也在增多[1-3]。为了防止事故发生,相关标准设置了一些防护措施,标准中虽然有人车误入检测装置的规定[4],但基本上为光束遮挡型,包括红外或激光扫描式,存在盲区或失效时间段问题,即在激光或红外光束扫描不到的区域存在检测盲区,即使有人员误入该区域,检测装置也无法检测出人员误入行为,而增加扫描光束数量会使检测装置成本明显增加,且不能完全解决光束扫描盲区问题;如果人员在车辆进出工作区时误入机械式停车设备,此时激光或红外光束被汽车遮挡,检测装置失效,也无法检测出汽车进出时间段内的人员误入行为,存在失效时间段问题。
2017年12月江苏某医院立体车库,一名女子在车辆开出时误入车库被撞伤,此时车库卷帘门处的激光或红外检测系统被车辆遮挡未起作用,未能及时检测识别女子误入车库行为并制停车库,随着正常取车状态的升降台下到负一层,后被自动运行的车辆和搬运车辆的设备撞伤[5]。
因此,本文将智能视频分析技术应用于机械式停车设备的人员误入检测中[6-14],建立了机械式停车设备人员误入联动报警系统。该系统不影响车库原有声光信号,当检测到有人员进入车库前黄色警戒线区域(即将误入车库时),人员监测识别摄像机可以自动识别拍照并启动声光警示,引起即将误入车库人员的注意,使其退到黄线以外区域,避免安全事故的发生。
1 系统组成与工作原理
如图1所示,机械式停车设备人员误入联动报警系统包括用于人员监测识别的摄像机、黄色警戒线、RS485通讯总线、两个声光报警器和一个显示器,所述黄色警戒线设置在停车位前方的地面上,黄色警戒线与停车位入口处的边界线平行,且二者间距为1 m,黄色警戒线与停车位入口处的边界线及停车位两侧的直线构成人员误入监测区域;两个摄像机均通过RS485总线与声光报警器连接。摄像机内部集成了控制器,摄像机能够拍摄整个人员误入监测区域。
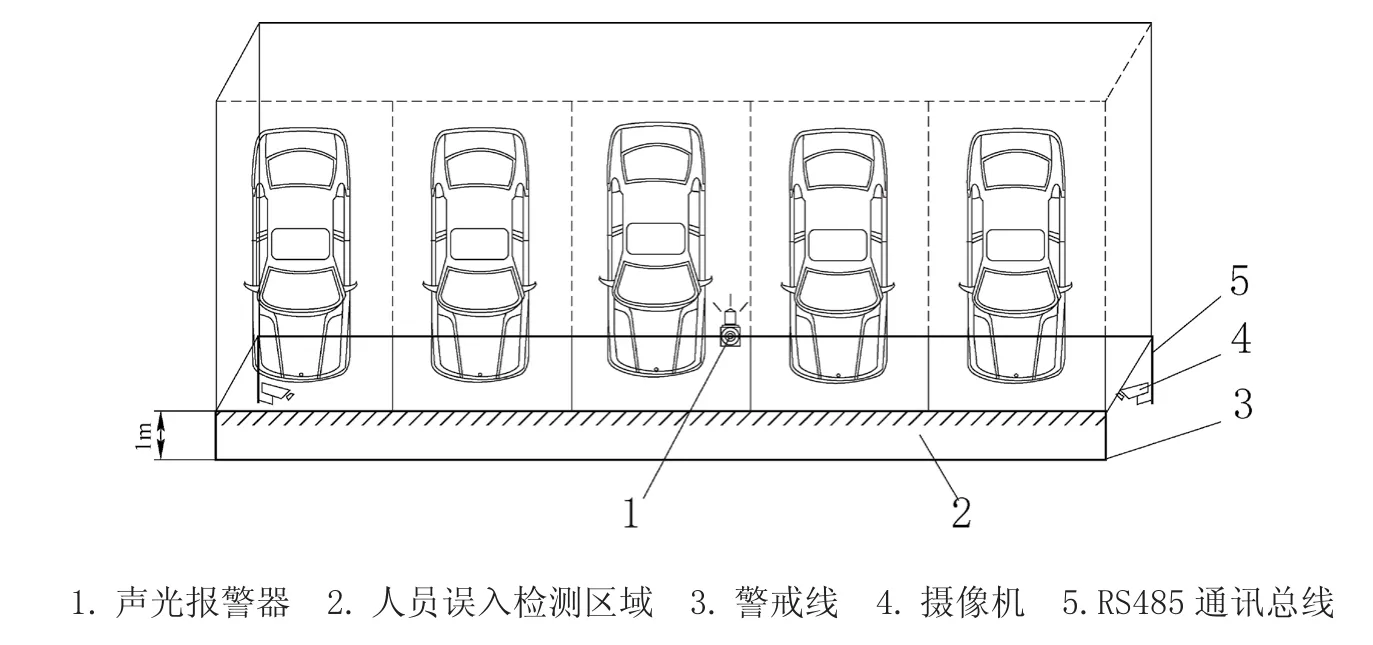
图1 机械式停车设备人员误入联动报警系统工作原理图
摄像机通过RS485总线与声光报警器连接部集成控制器,能够拍摄整个人员误入监测区域。人员误入监测区域的两端各设置有一个人员监测识别摄像机,两摄像机均通过RS485总线与声光报警器连接。对于并排设置有多个停车位的机械式车库,沿人员误入监测区域的长度方向每隔30 m设置一个识别预警子模块,每个识别预警子模块包括两个摄像机和一个声光报警器,2个摄像机均通过RS485总线与声光报警器连接,各个人员误入监测识别预警子模块相互独立。
通过在摄像机嵌入了人体图像识别算法对进入黄色警戒线区域5的人员进行自动检测识别,在人员即将进入车库时发出报警信号,通过RS485总线启动声光报警器,对即将进入车库的人员进行声光报警和语音提示,以提高人员的自我安全保护意识,从根源上避免人员误入车库事故的发生,提高机械式车库的安全水平。
2 技术要点
2.1 基于HOG+SVM的人员监测识别算法
为解决机械式停车设备现场监控图像光照条件较差、对比度低、人体目标服饰变化、姿态变化、人体运动的随意性和随机性等人体目标检测中的难点问题,采用方向梯度直方图(Histograms of Oriented Gradients,HOG)特征[15]结合线性支持向量机分类器(Support Vector Machine,SVM)算法[16]对人体目标进行检测识别,通过提取视频帧的HOG特征向量,输入到训练好的支持向量机人体目标分类器中,判别是否有人误入机械式停车设备中,步骤包括:
1)设定检测窗口,对采集的视频帧进行灰度变换处理;
2)采用Gramma校正法对输入图像进行颜色空间的归一化;
3)计算图像每个像素点的梯度;
4)创建单元格,为每个单元格构建梯度方向直方图;
5)将p×p个单元格组合成块(p≥2),对块的方向梯度直方图(HOG)进行归一化处理,以弱化光照的影响;
6)收集检测窗口内所有块的HOG特征形成表示所述视频帧的HOG特征向量,供分类使用;
7)采用包含不同种类的人体目标图片的INRIA数据集作为支持向量机(SVM)训练学习的数据库,提取数据库正负样本的HOG特征及对应的标签(+1或-1),输入到支持向量机中进行训练学习,得到一个基于人体目标检测识别的分类器:具体实施时采用Matlab 的libsvm工具箱中的 svmtrain 函数对 INRIA 的数据库进行训练,得到分类器的分类系数向量和分类阈值;
8)利用该分类器对当前视频帧的特征向量进行分类识别,判定是否有人误入监测区域。
2.2 基于 FPGA的人员误入联动报警系统设计
摄像机内部集成了FPGA控制器,声光报警器的型号为YS-01X,采用120DB大分贝报警喇叭,高亮LED频闪发光,可定制报警语音,可受控于RS485通讯协议,摄像机的型号为Aptina 公司的MT9V034,采用CMOS图像传感器,输出图像最大尺寸为 752×480 pixels,最大帧率为 60 fps,摄像机通过FMC接口与FPGA控制器连接,FPGA型号为EP2C70F672C8,FPGA控制器包括CMOS视频采集模块、控制模块、Nios II处理器、Avalon Bus总线、人体目标检测模块、检测算法接口、DMA控制器、ROM、片内并行存储器、SDRAM存储控制模块、片外SDRAM、RS485接口和HDMI接口。如图2所示,机械式停车设备人员误入联动报警系统工作流程如下:
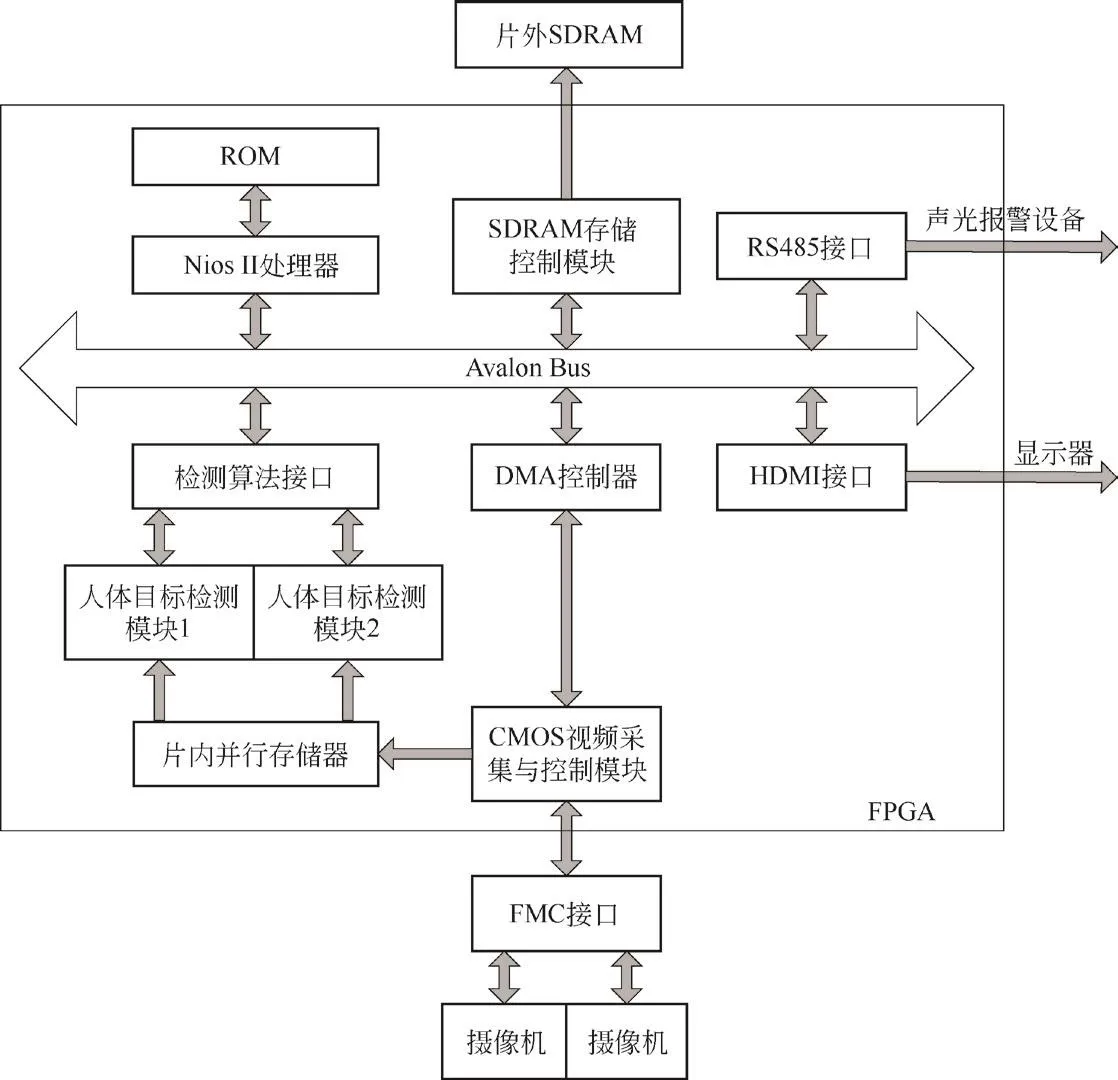
图2 FPGA控制器模块框图
1)系统开启,在FPGA控制器的Nios II处理器控制下,人体目标检测模块初始化,CMOS视频采集与控制模块自动配置与之连接的摄像机,人员监测识别摄像机实时对拍摄人员误入监测区域进行拍摄,并将拍摄的图片传送给FPGA控制器;
2)CMOS视频采集模块按640×480 pixels大小依次采集从摄像机发来的各帧图片数据,同时发送给FPGA内部并行存储器和DMA控制器的读端口,在传输给FPGA内部存储器时自动灰度化,并且按特定顺序存储;另外同时将彩色图像信息传输给DMA控制器并在其控制下传输给SDRAM存储;
3)FPGA内部存储器存入图片后,人体目标检测模块采用人体目标识算法对摄像机采集的图片进行检测,从图片存储器中取出对应位置的数据计算检测窗口的HOG 特征向量,再调用存储在 ROM 中的 SVM 分类器对特征向量进行分类,实现滑动窗口的人体检测;
4)检测到人体目标后,Nios II处理器发出报警信号给RS485接口,通过RS485总线启动声光报警器,对即将进入车库的人员进行声光警示。
进一步改进,为方便系统调试,还可配置显示器,显示器通过HDMI接口与FPGA控制器连接,FPGA控制器将检测结果通过HDMI接口输出到显示器进行显示。人体目标检测模块将人体目标窗口的尺度信息和位置信息发送给Nios II处理器,Nios II处理器在存储器中画出相应的方框,输出显示结果。
3 小结
本文设计了机械式停车设备人员误入联动报警系统,对人员即将误入车库行为进行识别和预警,从根源上防止人员误入车库事故发生。系统在FPGA上设计并实现了复杂背景下基于HOG+SVM的人员监测识别算法,对进入车库前黄色警戒线区域的人员进行自动检测识别,在人员即将进入车库时发出报警信号,通过RS485总线启动声光报警器,对即将进入车库的人员进行声光报警和语音提示,引起即将误入车库人员的注意,使其退到黄线以外区域,从根源上避免人员误入车库事故发生,同时可以辅助车库管理人员完成设备日常看护管理,有效地节约了使用单位的管理成本。