基于摄影测量的起重机主梁变形检测方法*
2021-07-21赵章焰鲁恩顺
赵章焰 朱 强 鲁恩顺
武汉理工大学物流工程学院 武汉 430063
0 引言
近年来,我国港口发展迅速,港口机械数量也逐渐增长,起重机的安全事故频发。自2014年起,我国起重机械安全事故数量逐年递增,2016年达到了94起,且死亡人数在特种设备安全事故总死亡人数中的比重也在不断上升。因此,对起重机进行安全检测势在必行。主梁是门式起重机的主要承载构件,如果主梁发生严重变形后仍正常使用,不仅影响起重机的使用性能,更可能造成安全事故,所以需要重点检测主梁的变形。
1 常用方法
常用的测量主梁变形的方法有拉钢丝法、水准仪法和布设传感器法。钢丝法操作简单,测量成本低,但测量结果会受到钢丝绳自重影响。另外,钢丝绳具有一定的弹性和韧性,弯曲后不易拉直,会造成较大误差。水准仪法是将水准仪放在主梁端部调平,用钢直尺置于待测位置进行测量。水准仪法测量快捷准确,但携带水准仪到主梁上不方便,且测量人员站在主梁上会使主梁变形,从而影响精度。此外,光线不足、距离较远都会影响读数,产生误差。利用布设传感器的方式进行测量,可取得精确、详实的相关数据,但效率极低,往往需要相关设备停机1~2 d才能完成测量工作,且传感器的安装工序也十分复杂,由于港口环境较为恶劣,传感器裸露在外,很难满足长期稳定工作的要求。鉴于此,针对于起重机械的变形检测,需要一种高效便捷的检测方法。
2 摄影测量方法
2.1 求解外方位元素
摄影测量是一种非接触式测量方法,仅需少量控制点和指针点的坐标信息即可通过拍照的方式获取被测物体的三维坐标,从而得到尺寸信息。此方法在测量效率、实验成本以及测量距离上均有优秀表现,随着摄影测量技术和计算机视觉的发展,使用摄影测量技术来测量构件三维尺寸的方法在工程测量领域的应用越来越广泛。
在进行摄影测量时,首先要求解相片的内外方位元素。内方位元素是指摄影过程中镜头中心相对于相片的位置关系参数,在相机标定检校时即可确定。外方位元素是指相机在待测物体所在物方坐标系的位置参数T和姿态参数R,包括3个线元素X、Y、Z和3个角度参数ψ、ω、κ,求解原理可表示为
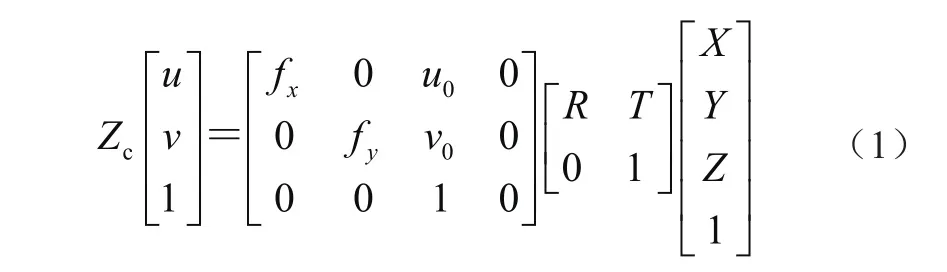

采用单像空间后方交会的方法,利用4个控制点的物方坐标、影像坐标和相机的相关参数,根据共线方程求出摄影中心的外方位元素。
2.2 双目测距
3 实验
3.1 实验准备
本次实验所选择的相机为佳能EOS 5DS,分辨率8 688×5 792,搭配的镜头型号为EF 50 mm f/1.8 STM,所采用的相机标定方法是Matlab提供的Camera Calibrator工具箱,测量对象为门式起重机,试验场环境见图1。

图1 试验场环境
3.2 实验流程
如图2所示,在现场架设全站仪,获取控制点的坐标信息,本文中所有点的坐标通过拓普康602G全站仪采集。该全站仪最远有效测距为200 m,无外界干扰情况时的测量最大误差为±(3+2×10-6D)㎜,充分满足测量的工程要求。为保证数据的准确性,所有数据都进行3次独立测量,试验坐标取平均值。

图2 数据采集所使用的全站仪
坐标信息采集完成后,通过相机对现场进行拍摄。分别拍摄起重机在吊载和空载状况下的照片,每次拍摄从左方、右方两个角度进行,左方、右方夹角为45°~60°。拍摄完成对试验数据进行处理,在起重机上设置实验点,将吊载和空载下的数据进行比较可得到主梁的变形量。控制点和指针点的选取如图3所示,其物方坐标如表1所示。

表1 起重机测量控制点、指针点物方坐标 mm
3.3 实验结果
分别处理3组空载和吊载的实验照片,人工选取各个测量过程中的左右照片中的控制点和指针点,利用后方交会解算外方位元素,取3次实验的平均值作为最终结果,表2~表5为相机的外方位元素和试验点物方坐标。
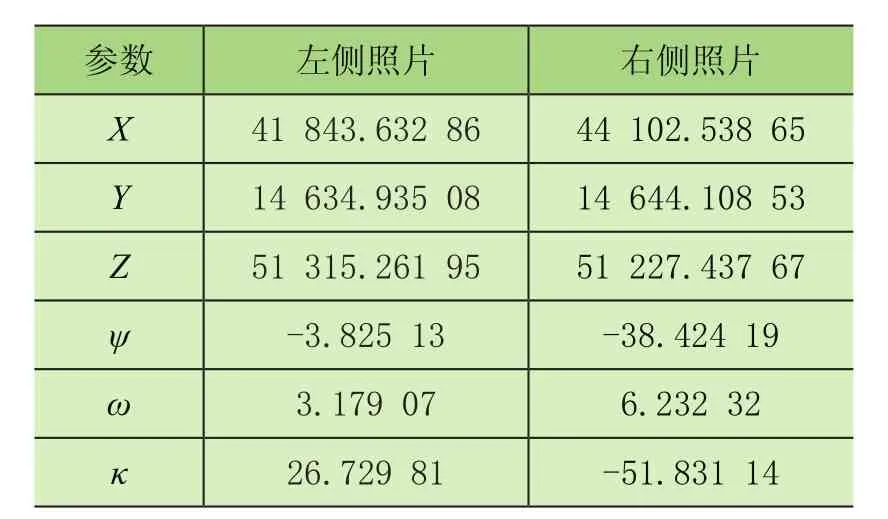
表2 空载测量外方位元素
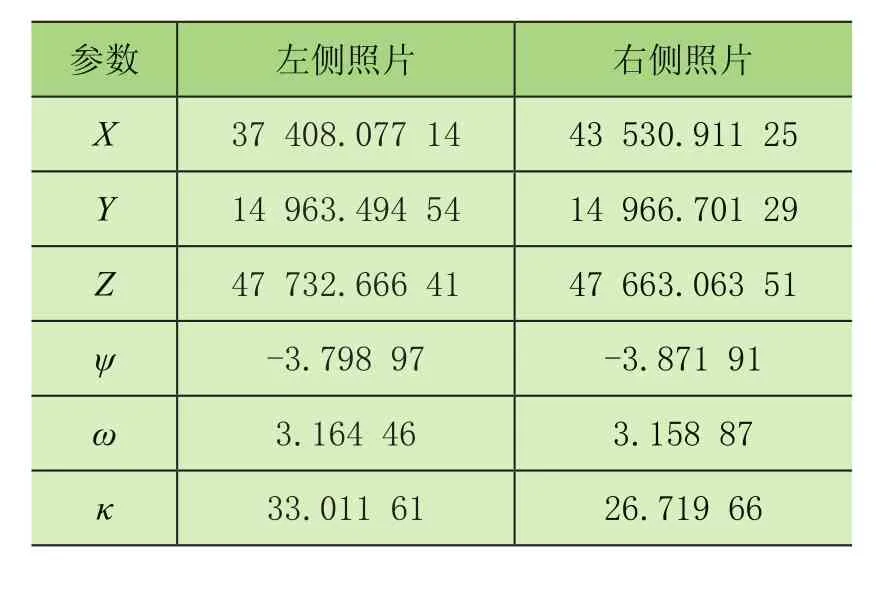
表3 吊载测量外方位元素
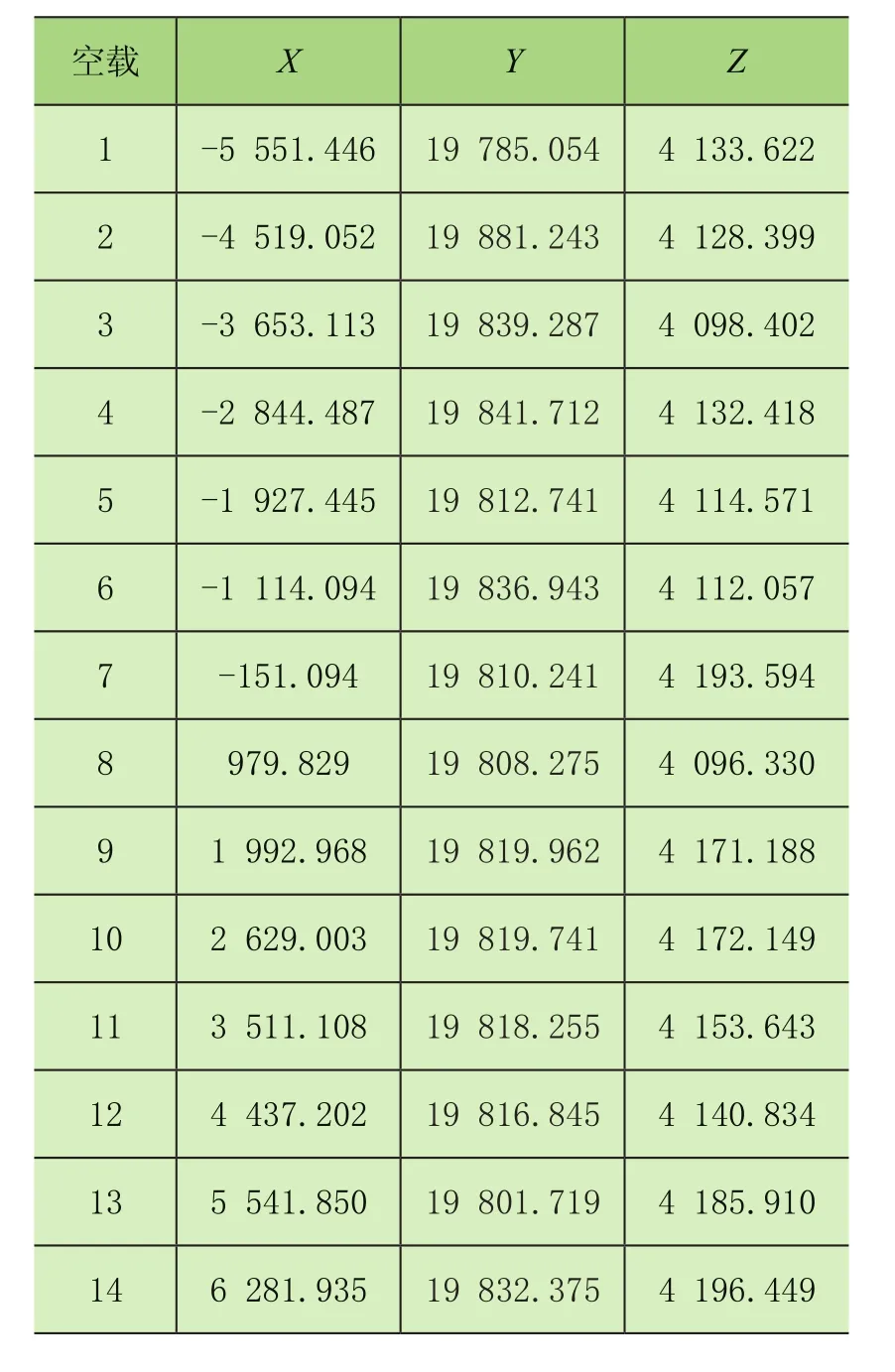
表4 空载时试验点物方坐标 mm
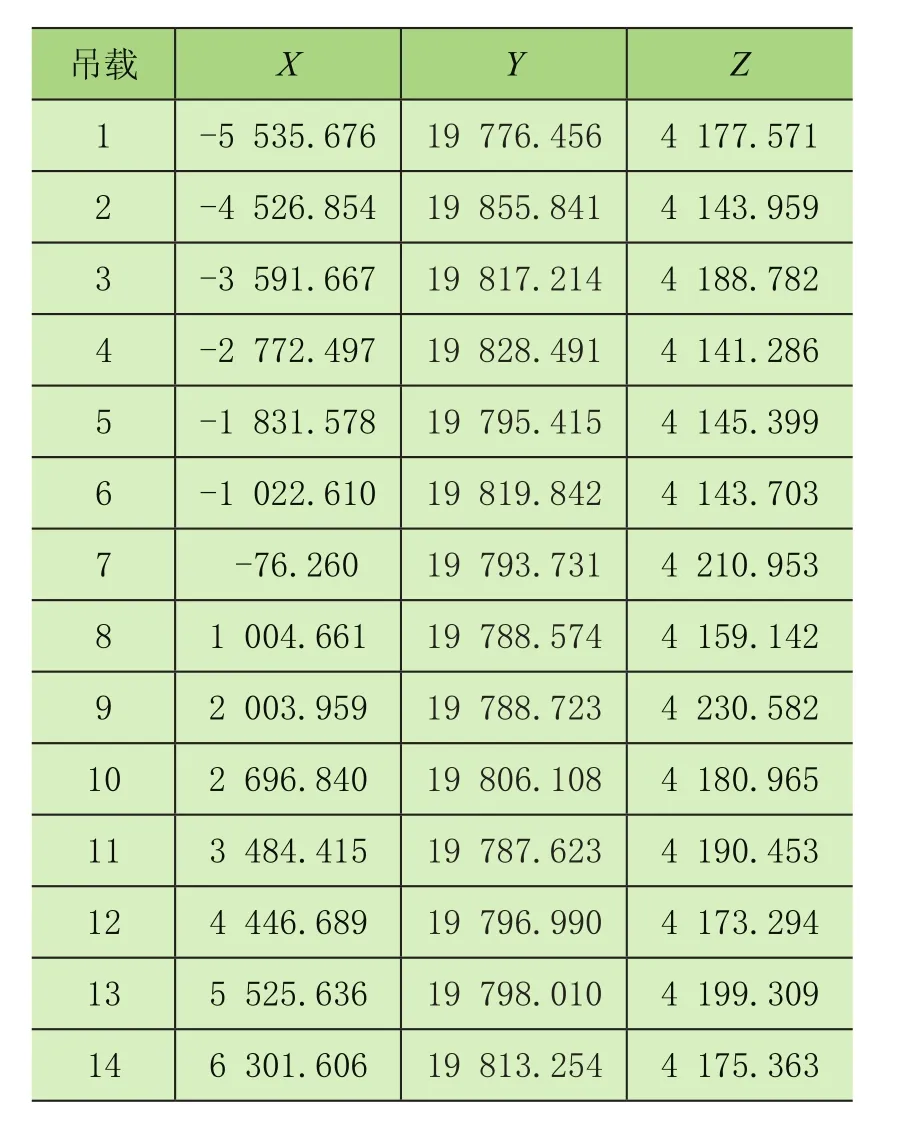
表5 吊载时试验点物方坐标 mm
将得到的数据对比,发现X坐标和Z坐标的误差在5 ㎝左右,进而说明测量精度的可靠性。以试验点X坐标和吊载、空载Y坐标的差值为参数进行曲线拟合,得到图4所示主梁变形曲线。
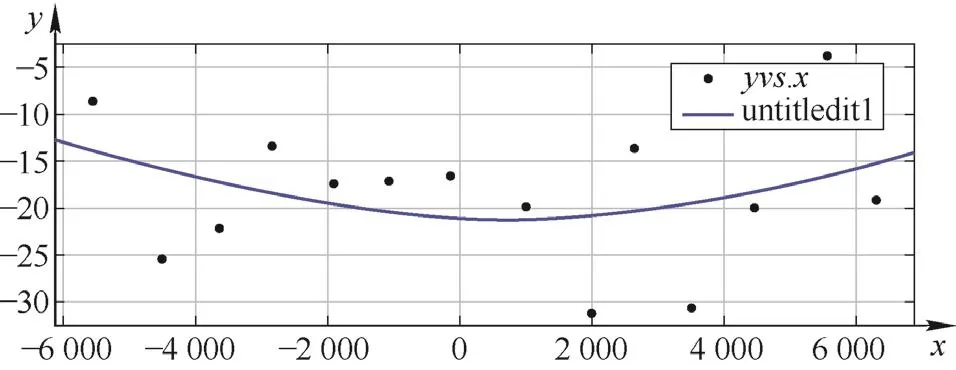
图4 曲线拟合
4 结论
本文基于摄影测量设计了针对起重机主梁变形的测量方法,通过全站仪进行控制点和指针点的标定,解算出相机的外方位元素,然后通过人工选点进行关键点的测量,从而得到主梁的变形信息。相比于传统的测量方法本文所述方法具有以下优势:
1)非接触测量方式,可排除接触测量的人为等受力干扰,便于实现自动化;
2)操作简单,实验环境安全;
3)可同时测量多个目标,测量效率高;
4)除了测量主梁变形,也可通过设计专用算法,对其他参数进行实时监测。
目前,本文提出的方法仍然存在改进空间,受限于环境因素影响,相机采集的相片中同名点的自动匹配效果不佳,主要依赖于人工选择。未来将探究自动匹配算法,提高测量精度的稳定性和测量过程的自动化程度。