一种基于单脉冲雷达信号生成方位距离像的多目标跟踪算法
2021-07-21张德军曾维贵石文君刘万锁宁顺杰
张德军 曾维贵 石文君 刘万锁 宁顺杰
(1.空军工程大学航空机务士官学校 河南信阳 464000;2.海军航空大学 山东烟台 264001)
0 引言
单脉冲雷达具有跟踪精度高、获取数据率大、抗干扰性能好等优点[1]。其工作原理是利用距离分辨率确认目标,然后采用单脉冲测角技术测量目标偏离角,从而实现目标定位。能够有效地对单目标进行检测,但当同一距离单元内有多个目标回波时,由于其只产生和差信号的单一指示角,与任一不可分辨的目标角度不对应,且该指示角会随目标相对幅度、相位的变化而变化。因此,传统单脉冲雷达很难对区域内多个目标进行区分。文献[2]采用广义似然比检测方法对单脉冲雷达导引头同一分辨单元内多个Swerling II型目标的存在性进行检测,但该方法依赖于目标分类的先验信息;文献[3]应用多个隐马尔可夫模型(HMM:Hidden Markov Model)来解决依赖于目标分类的先验信息问题,但当多个目标相互遮挡影响时,多目标检测效果较差。为实现多目标准确检测和连续稳健的跟踪,充分利用多个目标回波信息及单脉冲雷达距离高分辨的优势,直接从单脉冲雷达中频信号采样,用数字信号处理方法生成扫描区域态势方位距离二维像,借用图像领域经典跟踪算法,以实现对基于单脉冲雷达中频采样数据中多目标的连续跟踪。
1 单脉冲雷达中频数据采集生成方位距离像方案
图1显示了本文基于单脉冲雷达中频数据采集生成方位距离像的流程。具体工作过程为:发射机产生的信号被送至和差比较器输出和信号的∑端,1、2端输出同相等幅的激励信号,由两个馈源天线调制后进行发射。接收回波时,两馈源将接收到的回波脉冲信号分别送至和差比较器的1、2端[4]。图中Δ端输出差信号。

图1 单脉冲雷达中频数据采集方位距离像流程图
和差两路信号分别经过混频、中放后,然后经过ADC采样,将数据输入到数字信号预处理模块[5]。数字信号预处理模块主要进行对采集的数据进行下变频、滤波等处理。最后,差信号输出方位信息,和信号经过脉冲压缩生成一维高分辨距离像(距离分辨率为10m左右)。结合方位和距离信息,就可以生成10°左右扫描区域内的方位距离像。其中,数字信号预处理和脉冲压缩模块在FPGA中实现[6]。
2 基于ECO算法的单目标跟踪算法
近年来,图像领域单目标跟踪(SOT: Single Object Tracking)无论是在跟踪速度还是在跟踪精度上,其性能都得到了极大的提升。并且在如自动驾驶等民用领域得到了实际的应用。而本文的第一部分经过对单脉冲雷达进行中频数字化改进,现在就可以生成区域态势内方位距离像,如图2所示(图2(a)是基于方位距离的回波图、图2(b)是基于方位距离采集单元生成图像)。从图2(b)可以看出,区域内目标的分布类似斑状目标图像。
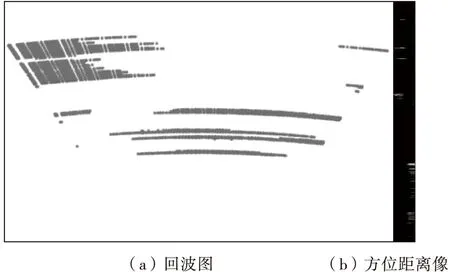
图2 中频采样处理生成的方位距离像示例
ECO(ECO: Efficient Convolution Operators for Tracking)算法是由视觉跟踪领域专家Martin Danelljan在CVPR2017中发表的一篇基于相关滤波文章提出的[7]。由于其提取的特征全面(CNN, HOG, CN)、筛选提炼了相关滤波器组、多样化训练样本,所以ECO算法不论是从跟踪精度上还是速度上都能取得了优异的结果。特别是在抗遮挡上、其性能表现更加突出。
与传统的基于相关滤波器的跟踪器不同的是:ECO跟踪器将离散通道特征插入到连续域中,目的是为了从M个训练样本中学习到连续T周期的多通道卷积滤波器f,通过最小化下面的目标函数为
(1)
其中,αj表示样本xj的权重;卷积算子Sf将样本xj映射到得分函数Sf上,用来预测目标在位置t的置信度分数;函数yj用于计算Sf中传入xj的期望。正则项则使用权重函数ω来抑制边界效应。
变换到频域,然后对滤波器f求导,可以得到式(2)。
(2)

3 融合单目标跟踪与数据关联的在线多目标跟踪
融合单目标跟踪与数据关联的在线多目标跟踪流程图如图3所示。其主要思想是:通过深度卷积网络匹配当前帧检测结果和历史检测、跟踪图像目标集合,实现数据关联。
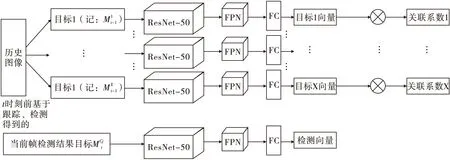
图3 融合单目标跟踪与数据关联的在线多目标跟踪流程图


用KM算法(Kuhn-Munkres Algorithm)进行如图4的数据关联[14],KM算法中用到的关联系数为Ci,j。

图4 基于KM算法的数据关联示意图
融合单目标跟踪与数据关联的在线多目标跟踪具体步骤如下:
步骤一:对第一帧方位距离像进行图像显著性检测[15-16],确定多目标区域,并把这些目标区域存入历史检测、跟踪集合,作为后续检测结果匹配对象。
步骤二:对接下来帧图像同样进行显著性检测,并对前一帧检测、跟踪目标使用单目标跟踪ECO算法得到当前帧跟踪结果;采用图3流程进行跟踪目标和检测目标之间的关联。需要说明的是:对于找到关联匹配结果的目标,将相应的检测结果作为其在当前帧的跟踪结果;对于未关联匹配的目标分为两种情况:一种是前一帧处于跟踪状态且当前帧没有检测到(这里,一个典型例子是当受杂波影响导致目标回波闪烁时,目标有时被检测到、有时丢失),对这种类型目标将其设为丢失状态,并将其放入历史检测、跟踪图像集合,如果连续N帧没有关联到,则将该目标设为终止状态;另一种是当前帧检测到但同历史检测、跟踪图像集合没有关联上,则将该目标设为新目标出现状态。另外,如果当前单目标跟踪结果进行IOU判断为遮挡,则不把该跟踪结果放入历史检测、跟踪图像集合中。
步骤三:循环步骤二,直到数据采集终止(也就是没有新采集生成图像)为止。
4 验证实验与分析
单脉冲雷达每隔3秒钟扫描生成出基于雷达信号的方位距离像,该图像为10°左右区域。在Windows10下对采集生成的图像序列进行算法验证,使用Matlab运行ECO单目标跟踪算法,使用python进行检测、跟踪向量间的相似度计算和数据关联。图5为从采集生成图像序列中选取的第5、25、45和65帧图像。图6为对图5进行显著性检测得到的对应结果。图7为采用本文多目标跟踪算法的运行结果。

图5 中频采样处理生成的方位距离像

图6 显著性检测处理结果

图7 文中提出多目标跟踪算法运行结果
从图5至图7对应生成的四帧方位距离像可以看出:目标1、2、4、5、6、7、8在整个过程中都能实现稳健的跟踪;目标3在第5帧出现后,由于雷达反射信号减弱,在后续帧再也没检测到,故终止该目标(即其状态为“终止”);目标7在25帧左右以“新目标”状态出现,稳定跟踪一段时间后因雷达信号较弱后消失,所以目标7在45帧以后的状态是“消失”;目标8在45帧左右也是以“新目标”状态出现;目标5和6在25至65帧之间发生了相互遮挡的情况,应用ECO单目标跟踪算法可以准确地判断出“遮挡”状态,究其原因是ECO算法采用的策略是:非每帧更新模型,防止模型漂移。当然,在整个实验过程中,目标1和目标7因雷达反射接收信号较弱在多帧采集图像中出现了漏检情况,但当信号恢复后使用文中方法能够恢复正确跟踪,整个实验的多目标跟踪准确度(MOTA)达到了83.7%。
5 结束语
本文针对传统单脉冲雷达信号中多目标跟踪方法效果差、不稳定等问题,直接对单脉冲雷达信号进行数字信号处理和采样生成图像,然后使用融合图像领域经典单目标跟踪算法的在线多目标跟踪方法进行区域内多目标跟踪。最后实验结果表明本文方法能够较好地解决传统基于一维雷达信号多目标跟踪中出现的问题,为基于单脉冲雷达信号的多目标跟踪给出了一种新思路和解决方案。后续的工程实现中要着重解决单脉冲雷达边扫描边实时跟踪多目标问题。
