基于DeltaOS系统的雷达动目标测量方法
2021-07-21梁璐
梁 璐
(中国电子科技集团公司第二十研究所 西安 710068)
0 引言
近年来,随着我国国防工业的不断发展,中国的武器装备研发在国际上已占据一席之地。为了不受制于进口处理器和操作系统,同时考虑到国防安全等因素,国内电子市场尤其是国防科技领域对核心技术的国产化具有强烈的需求。道系统(DeltaOS)是以美国风河公司的VxWorks操作系统为理论基础,由我国自主研发的国产嵌入式实时操作系统,它继承了Vxworks良好的内核特性以及实时性强等特点,作为智能电子设备软件的核心,已广泛应用于航空、舰船、兵器等电子领域的指控、火控、雷达、水声、光电等系统。
龙芯3A作为新一代的64位4核高性能通用国产CPU,其采用RISC加固,兼容MIPS指令集,具有1G主频,每个处理器核具全流水的64位双精度浮点乘加部件,在数字信号处理以及控制领域应用前景广阔。DeltaOS支持多核CPU,采用对称多处理模式(SMP),支持抢占式多任务、 任务的优先级调度、等特点,同时可实现多任务并行执行,也可绑定任务运行在特定的核上。
随着军工行业对国产化的要求,龙芯3A+DeltaOS系统架构在军品中已占据主导地位,由于雷达信息处理对于实时性和运算性能的要求很高,嵌入式操作系统平台倍受青睐,本文主要介绍了基于3A+2H硬件平台的DeltaOS6操作系统下海上雷达组网对动目标搜索测量跟踪的工程实现。
1 软件设计
文中基于道系统的雷达组网测量定位应用软件主要实现的功能包括:系统对时、控制雷达工作状态以及雷达在作战状态下接收信号处理的和差信号求解角误差值。其中利用和差归一化计算角误差信息推算出测角信息,根据测距,测角结果实现滤波外推算法,这要求将接收到的雷达坐标系下的目标信息转换到一个相对稳定的坐标系下实现,大地坐标系下可满足此条件,因此需要实现多级坐标转换。滤波外推在跟踪雷达中对控制波束指向角是至关重要的,将外推出的目标角度转换到雷达坐标下的角度作为布相角提前一个周期送给波控端机。具体的软件功能如图1所示。
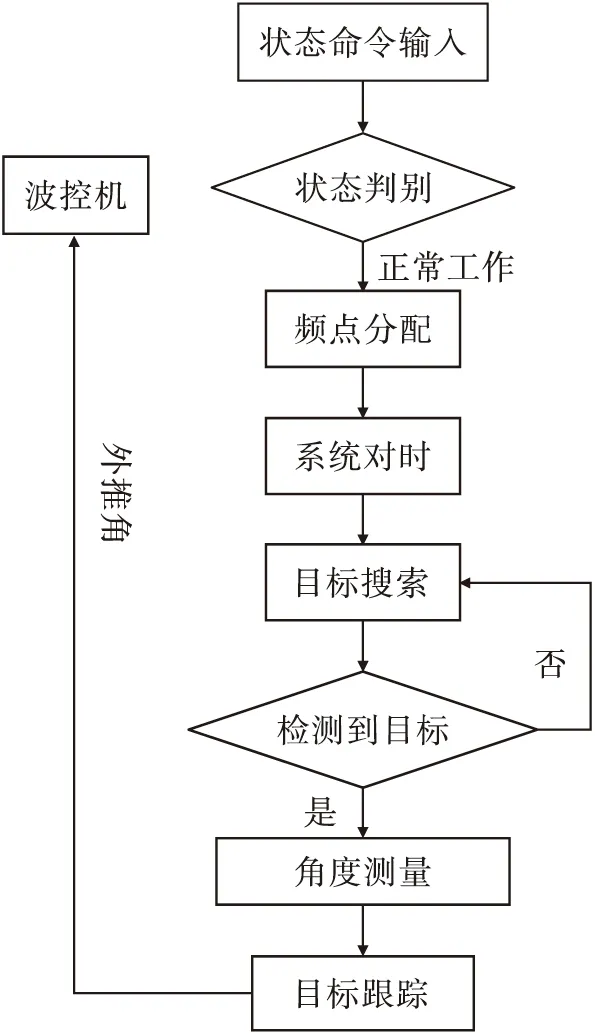
图1 软件流程
要实现以上功能,应该合理进行任务划分,以避免任务过细引起的任务频繁切换造成开销增加,任务分解不够造成系统吞吐量不够[1]。工程中分成两个任务,即控制任务和测量跟踪任务。多目标的测量跟踪处理根据雷达的工作时间和需求来做处理,工程中选用的是单任务分时处理方式,任务之间的通信机制我们选用了信号量,通过工程中具体的工作机制以及雷达测量条件控制各个任务信号量的释放以及触发。
2 影响测量精度的因素
雷达组网对于编队作战具有重要的意义,协同作战以其能力互补增效并且能提高作战效能[2]的优势必将成为今后作战系统的主流作战方式,这样网内成员可共享各自测量的目标信息,更有利于快速准确锁定目标,打击敌方,因此,对各平台之间时间和空间的坐标统一便有了有很高的要求。
时间坐标统一[3]的意义在于可以保障在不受卫星统一授时的条件下,多平台之间测量信息的准确性。针对多平台与指挥中心的传输通道的固定或随机延时,通过时间补偿的方式统一时间,工程中应用较为常用不再赘述。
在多目标跟踪系统中,任何一个观测模型都是依赖状态空间模型建立的,因而选择合适的坐标系是很重要的,坐标系的选择直接影响跟踪的精度和计算量大小[4]。接下来便以工程实践为依据具体描述。
首先,数据处理收到信号处理送来的回波信号,是雷达坐标系下的目标信息。假设组网雷达中雷达坐标系下的目标径向距离为R,目标偏离船首的方位角为b,假定俯仰角为e(一般设为0)。坐标转换通常有两种方式,一种是平移,另一种是旋转变换。由不稳定甲板到稳定甲板坐标的转换,首先转换到不稳定直角坐标系(以下小写xyz表不稳定坐标,x1,y1,z1表稳定坐标)为
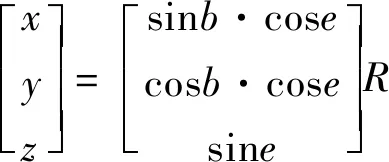
(1)
再转换到稳定甲板直角坐标为
(2)
舰艇不稳定甲板坐标转换到舰艇稳定甲板坐标的转换矩阵为
(3)
舰艇稳定坐标到舰艇不稳定坐标转换矩阵为M的逆矩阵见式(4)。
(4)
第二步再从甲板坐标再转换到大地坐标作外推前的准备,需考虑航向角以及纵横摇角度。
1)偏离大地坐标系下的航向角为ψ

图2 航向角转换

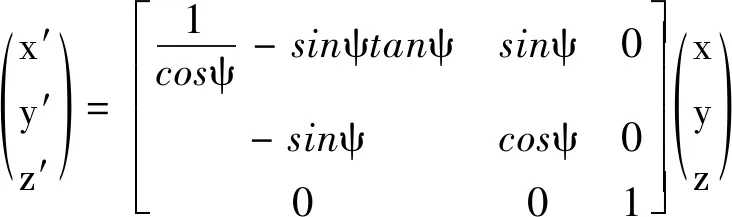
(5)
2)纵摇角(φ),舰首抬起为正,绕X轴顺时针旋转可转换到大地系
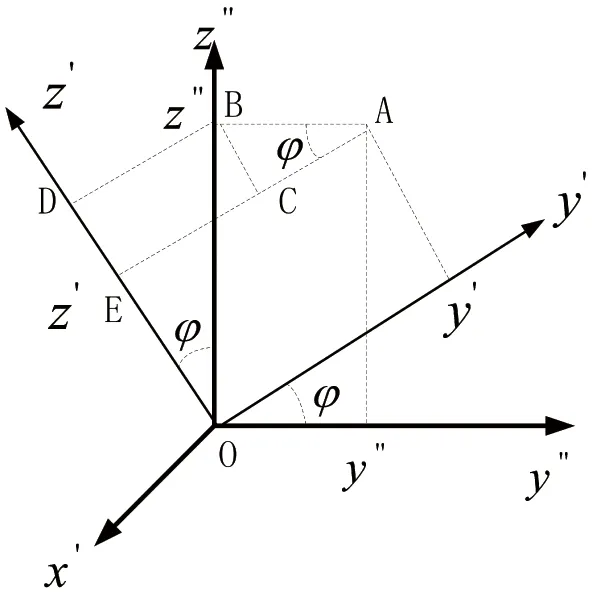
图3 纵摇角转换
x″=x′
y″=y′cosφ-z′sinφ;
(6)
3)横摇角(θ),左舷抬起为正,绕Y轴逆时针旋转
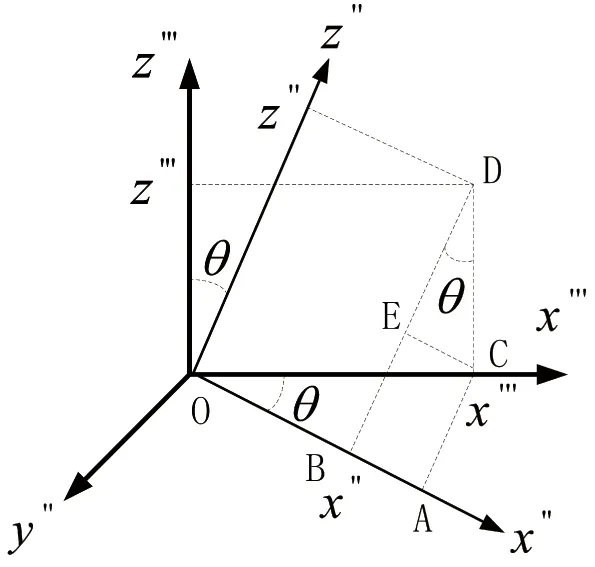
图4 横摇角转换
y‴=y″
z‴=z″cosθ-x″sinθ
(7)
最终由雷达轴线系到大地坐标系的转换矩阵为
……
(8)
3 跟踪算法和仿真
通过和路差路信号以及互导因子计算出波束指向的方位角误差叠加指向角,作角度外推和滤波,外推角作为下一帧波束指向。文中采用αβ滤波算法[5],针对的是匀速或者缓慢机动的目标航迹跟踪,通过公式(9)得到滤波后的目标节点信息。
xs(k)=xp(k)+α[xm(k)-xp(k)]
vs(k)=vs(k-1)+β[xm(k)-xp(k)]/T
(9)
xp(k+1)=xs(k)+vs(k)T
其中,xs(k)是滤波后的位置;vs(k)是滤波处理后的速度;xp(k)是预测的位置;xm(k)是实际测量的位置;T是测量时间间隔;xp(k+1)是外推值。其中距离和速度的增益系数α,β,要依据实际情况,当K较小时,对目标的跟踪刚开始,对距离和角度的估计值并未完全稳定可靠,因此必须扫描次数越大,估计值的可靠性越大。
(10)
根据外推出的节点位置,计算下一测量时刻的天线波束指向。
假设目标在海上以30节的速度匀速直线运动行驶,图5为外推距离角度与真值的误差仿真图。

图5 匀速直线运动跟踪效果
下面一条曲线表示3000点外推角度与真实值的误差均值小于0.5mrad,上面一条曲线表示距离误差小于2m在60个周期可稳定滤波外推达到收敛。
4 系统测试与实测试验数据结果分析
道系统在数组信号处理中的整机性能测试结果如表1所示。

表1 整机性能测试结果
国产化操作系统中断响应时间和程序运行时间均能满足指标要求。两个雷达站点互测得到的测量结果在经长时间采集的数据分析2个站点互测的距离误差和角度误差均可满足设备性能测量指标。
5 结束语
文中主要介绍了基于操作系统DeltaOS6以及雷达组网过程中与测量精度有关的坐标转换与跟踪算法,对目标匀速直线运动模型进行仿真,距离和角度误差结果很小,同时试验数据分析结果距离、角度滤波外推的误差均在需求范围内,长时间的外场实验对操作系统的可靠性,稳定性做到了充分的验证,实用前景广泛。
