面向共享电动汽车的远程控制方案设计
2021-07-21陈欣蕾陈长健冯俊郑舒懿韦岽
陈欣蕾、陈长健、冯俊、郑舒懿,韦岽
(上汽通用五菱汽车股份有限公司,柳州 545007)
0 引言
近年来随着新能源汽车的急速发展,以及“共享经济”概念的快速普及,新能源汽车作为一种新兴产业进入人们视野。共享汽车是一种创新型的服务类产品,也是个体交通方式的革命。其凭借环保、便捷、省钱和资源共享等特点,迅速吸引了大量年轻消费者,也具备了强大的发展潜力[1]。共享汽车不仅能有效缓解消费者临时用车需求、城市交通拥堵和停车困难等问题,也有利于社会多样化发展。
但随着共享电动汽车汽车的投放使用,运营商的运维难度也随之增大,车辆难管理、用户恶意租借不退还以及二次恶意转租等问题层出不穷,严重困扰着运营商。而本文提出的面向共享电动汽车的远程控制策略就在一定程度上解决该问题,提升运营商的运维效率,在确保车辆行驶安全前提下,保障运营商对车辆的控制。
1 现有方案简介
如今市面上的共享电动汽车普遍具备整车控制器、车载终端,并能将整车数据实时上传远程服务平台以进行监控及国家备案。而整车控制器作为电动汽车的大脑,协调控制车内其他控制单元例如车身控制器、电机控制器、充电机及电池管理系统等,并且能实时监控整车运行状态及响应驾驶员需求,实现整车的驱动控制、能量回收和故障诊断等功能。
目前整车控制器可通过车载CAN 网络将整车数据实时发送至车载终端,最终车载终端通过无线网络将数据流传输至远程服务平台,达到远程监控、应急指挥和车辆定位的目的(图1)。但该技术有一定的局限性。

图1 整车远程数据流向
(1)数据仅有整车控制器向远程服务平台单向传输,仅实现整车状态监控,未实现远程控制。
(2)目前较为常见的远程控制技术多仅限于实现门锁、车窗、空调等辅助系统的控制,尚未对整车实现安全、可靠的远程限速、禁止上高压等驱动控制。
2 系统方案设计
2.1 方案概述
本文介绍的一种基于共享电动汽车的远程控制策略,当运营商检测到车辆逾期未还或异常使用时,在合规前提下,可以通过前端界面在远程控制云平台对车辆进行远程控制[2]。在平台界面下搜索车辆代码,可以下发“限速”或“禁止上电”指令。车内终端实时接收到远控指令后存储至内存中记忆指令,并向平台反馈“下发成功”。待终端检测到车辆处于充电状态时,再将远程“限速”或“禁止上电”指令下发给整车控制器。
完成充电后,使用人打钥匙上电时,整车控制器则根据接收到的远程指令,进入限速模式或禁止上高压模式,并将执行结果反馈终端。车载终端再根据整车状态及整车控制器反馈的执行结果,经算法整合后,将最终执行结果反馈至平台界面。平台工程师可通过界面,监控远程控制指令是否成功下发并执行。这不但可以实现在车辆绝对安全前提下执行限速、禁止上电的操作,还可以避免出现在行驶过程中接收远程指令,造成突然限速或下电的危险情况。
2.2 系统组成与作用
本方案主要由整车控制器、车载终端和远程控制云平台组成(图2)。各部分功能作用如下。
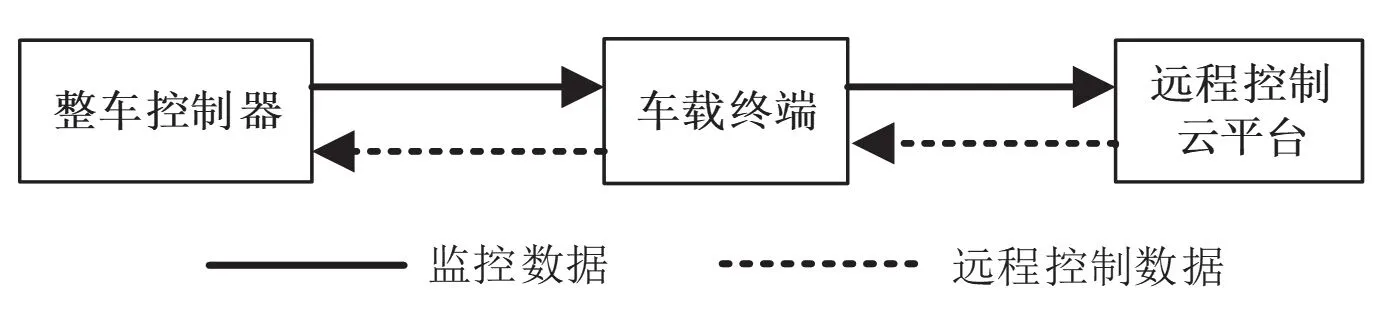
图2 系统组成模块
(1)整车控制器是汽车的核心控制部件,相当于整车的大脑。作为汽车指挥控制中心,整车控制器主要包含以下功能:驱动力矩控制、制动能量的优化控制、整车能量管理、CAN 网络通信和车辆状态监控等,它起着控制车辆运行的作用。
(2)车载终端是基于国标要求,可对电动汽车进行状态监控的控制器。它具备数据采集、数据存储、数据传输和收发远程控制指令的功能,是车辆与外部平台进行交互的重要转发部件。车载终端存在一定存储能力,当数据传输发生异常而导致延迟发送时,当链路恢复稳定后,车载终端会与云端平台重新连接,将未发送的报文数据补发,避免数据丢失。
(3)远程控制云平台是介于前端界面和车载终端之间的云端平台,用于接收前端输入的控制指令,并通过特定算法得出相应参数,最终将数据发送给车载终端。
2.3 系统工作原理
与常见的远程控制方案相比,本方案在每个控制节点均增加了状态反馈,便于前端界面的显示及监管。并且“限速”或“禁止上高压”指令下发,不会第一时间生效,而是在充电后再次起动时生效,确保了车辆的行车安全。具体工作原理如下(图3)。
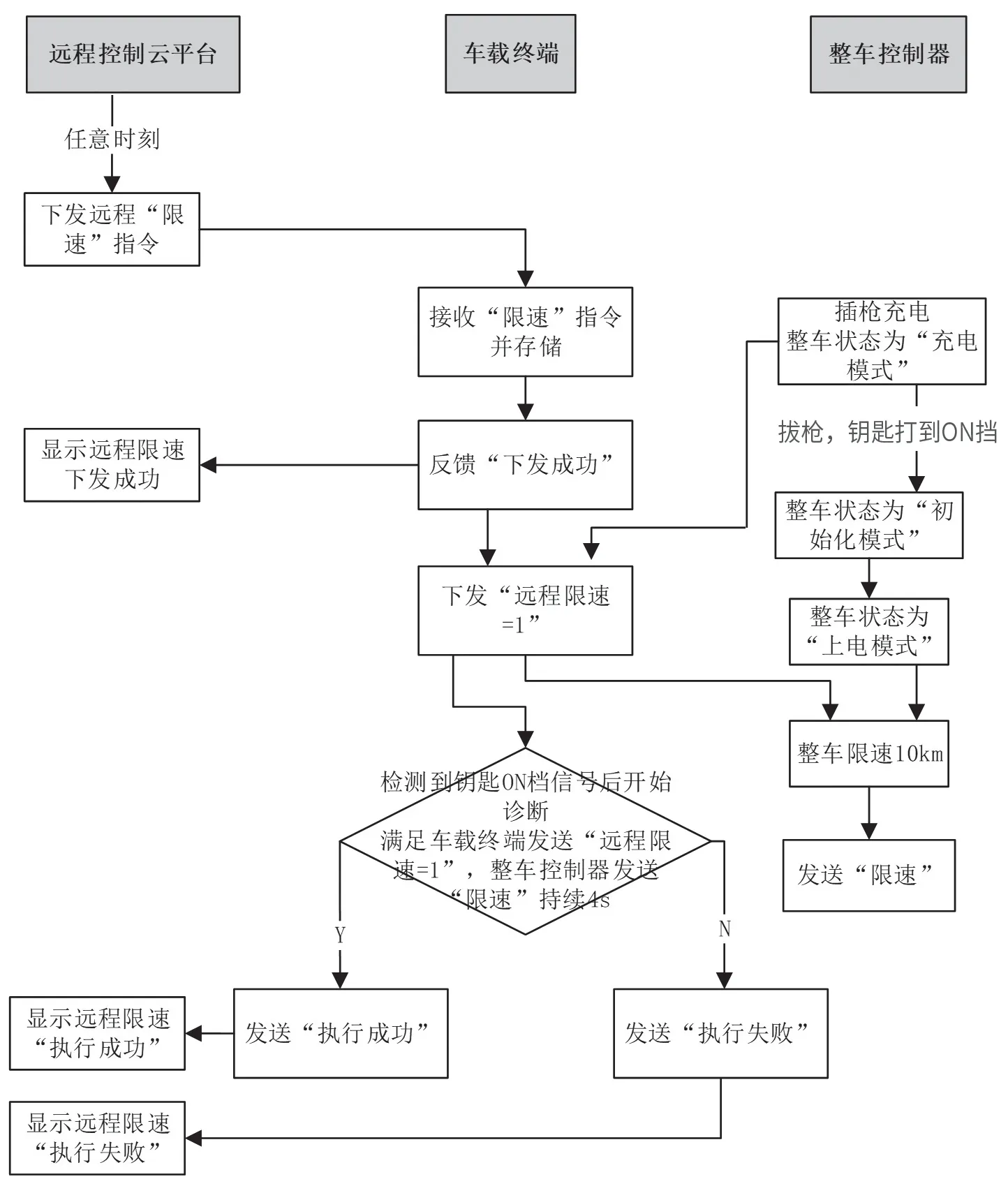
图3 远程指令下发流程 以“限速”指令为例
(1)工程师确认共享电动车处于逾期或则违规行驶状态时,可通过身份权限认证后,登录前端界面,输入该车辆的对应唯一车架号;点击界面“限速”或者“禁止上电”按键,指令将上传至远程控制云平台。
(2)云平台立即下发给车辆车载终端。车载终端检测车辆状态,若车辆处于正常行驶状态则将指令存储至内存中记忆。
(3)当用户将车辆拿去充电,车载终端检测到车辆正在充电则将信号通过CAN 总线发送给整车控制器,整车控制器进入相应的“限速”或“禁止上电模式”。待充电完成时,车辆将被限速10 km/h 或者无法上高压。确保在安全的环境下,后台已成功将车辆控制。
(4)当运维人员抵达车辆位置或用户已正常付费,则运营工程师仅需要在前端界面下发“取消限速”或“取消禁止上高压”指令至远程控制云平台,云端立即下发指令至车载终端,车载终端通过CAN 信号立即发送给整车控制器。再次起动后,车辆将恢复正常行驶状态。
3 结束语
本文设计了一种面向共享电动汽车的远程控制方案。该系统通过前端输入的控制指令下发车载终端,在车辆处于静止充电时才下发车辆,确保了整个系统的安全可靠。各个节点的状态反馈也能便于后台监控。运营商在该系统下管理共享汽车可以提升运维效率,确保车辆运行安全。该方案的使用有助于共享汽车的推广,给各大运营商后台管控提供便利。