配电网电压源变换器事件驱动控制策略研究
2021-07-20郭楚佳
郭楚佳,张 莹,张 芳
(陕西科技大学 电气与控制工程学院, 陕西 西安 710021)
0 引言
随着分布式电源的不断接入,新能源渗透率逐日提高,电网中电压、功率等变量的控制面临更多的挑战.国内外专家学者对电网功率、电压调控问题,不断寻找新的方法和措施.传统调压措施只能在传统低压配网中实现电压调控,因其单极性调压方式无法解决配电网中出现的过电压现象.目前,由于配电网中大量接入分布式电源,系统惯性降低、结构改变,使得电网不止出现欠电压问题,同时也出现严重的过电压问题,因此传统调压方式已经无法有效解决当前配电网调控问题.
由于电力电子变换技术的不断发展,基于电力电子技术的补偿设备由于其高可行性和性价比,成为解决配电网中调控问题的主要措施[1].其调压设备主要为动态电压恢复器(Dynamic voltage restorer,DVR)、电压跌落补偿器等[2,3].而该类设备主要为电压源变换器(Voltage source converter,VSC)与传统工频变压器相结合,其控制精度更高、调压连续可控、系统运行可靠,并且可以通过不同拓扑结构的电压源变换器实现电压的柔性控制[4].因而,电压源变换器成为配电网中必不可少的一种功率控制设备[5].
然而依靠单个电压源变换器不足以应对大扰动对电网电压和/或频率的不利影响,多变换器间协同优化的分布式控制成为了改善多变换器系统性能的有效途径[6].然而,随着系统复杂度增加,不同变换器之间必然存在通信延时,降低变换器输出电压控制性能.
上世纪五六十年代,文献[7,8]中提出不定期采样技术(事件驱动采样技术).基本思想是:定义一组离散采样时刻,设计采样时间间隔,并将采样时间间隔作为一个可修改的控制参数,不断寻找最大的容许采样时间间隔上界,从而保证有效的利用系统的性能和资源[9,10].采样时间间隔越大单位时间内的采样次数就越少,通过网络数据的发送次数也越少,从而提高了网络资源的利用率.随着通信和传感器技术的不断发展,事件驱动控制的概念在上世纪九十年代被提出[11,12].基本思想是基于测量信号(状态或输出)的通讯数据只有当事件驱动策略的设计条件得到满足时才会被发送.事件驱动控制是一种能够在确保控制品质的前提下有效降低过程控制单元运算和通信负荷的控制方法[13].文献[14,15]中描述了事件驱动的详细理论及应用范围;文献[16]和[17]分别对非线性系统、线性系统中事件驱动控制策略进行了深入的理论研究;同时事件驱动机制也广泛应用在各类系统中[18].
事件驱动控制在电网系统级控制中已有一定的应用,文献[19]和[20]分别基于功率偏差和电网频率偏差设计定阈值事件驱动机制,文献[21]中将有功功率偏差和频率偏差相结合,文献[22]针对自抗扰控制设计了事件驱动控制器,利用电流误差的非线性函数作为事件驱动条件,相比于时间驱动方法,上述事件驱动控制大大减少了分布式控制中的计算压力和通信压力.然而,现有的事件驱动控制策略多集中在系统级控制层面上,不能有效减少变换器装置级控制器计算压力、缓解变换器节点间通讯延时.
针对以上问题,本文突破已有时间驱动非线性控制方法的局限,为配电网多变换器系统中的三相两电平电压源变换器装置级控制部分,设计事件驱动控制策略.
1 系统建模
本文所针对的三相两电平电压源变换器如图1所示.在配电网中,变换器运行工况复杂,系统中高渗透率分布式发电的不确定性必然会给系统带来未知扰动.因此,本文在系统建模中,加入了未知参数ξ,表示系统未知扰动,通过对其估计,避免扰动对系统控制性能的影响.

图1 三相两电平变换器拓扑图
其中,esx为交流系统电压,ix2、vcx、ix1和udc分别为第二滤波电感L2电流、滤波电容C电压、第一滤波电感L1电流和直流电压,其中x∈{a,b,c},ix2为系统输出变量,即为被控变量.
根据图1所示系统,定义系统状态变量如下:
X1=[ia2ib2ic2]T,X2=[vcavcbvcc]T,X3=[ia1ib1ic1]T,控制量为U=[uaubuc]T是变换器的期望输出电压,即为调制信号;交流侧系统电压为E=[eaebec]T.则系统状态空间模型可写为:
(1)
其中,ξ=[ξaξbξc]T表示系统中的有界扰动,在系统模型中定义为一组不确定参数,表示电网中任意插拔的负荷和随机性强的分布式发电带来的电压波动.其参数矩阵分别定义为:
2 控制策略设计
2.1 模型分析
由式(1)所示系统模型可知,该系统为一个三阶系统,阶数较高,且包含未知系统扰动,常规线性控制方法难以取得较好的控制性能.反步法是一种递归设计方法,其优势在于可以将高阶系统拆解为多个一阶子系统.主要的思想为通过递归构造闭环系统的Lyapunov函数获得反馈控制器,选取控制律使得Lyapunov函数沿闭环系统轨迹的导数具有某种性能,保证闭环系统轨迹的有界性和收敛到平衡点,所选取的控制律就是系统镇定问题、跟踪问题、干扰抑制问题或者几种问题综合的解.
本文中设计的虚拟控制律需要保证系统内的稳定性,然后对得到的虚拟控制律逐步修正,保证其性能实现系统的全局调节,并且使系统达到期望的性能指标.通过反步控制策略通过反向设计可以使控制函数和控制器的设计过程更加系统化和结构化,同时可以控制相对阶数为n的非线性系统,消除经典无源性设计中相对阶数为1的限制.对于本文设计反步法控制的优点是可以设计控制器的同时设计随时更新的自适应律,以改善系统的暂态性能.
另一方面,事件驱动策略在电力电子系统中的研究多集中在相关动力学仿真设计中,如文献[23]针对电力电子的多时间尺度混杂特性提出了离散状态事件驱动,可以实现系统多时间尺度动力学行为的准确和高效仿真.而本文所针对的为多变换器控制网络的计算延时及通信延时问题,与已有研究中的仿真设计不同,需要和控制算法相结合,得到合适的事件驱动间隔和驱动时间.因此,结合变换器模型特点、反步控制策略以及事件驱动机制,本文提出一种电压源变换器装置级事件驱动控制策略,以解决多变换器控制网络的计算延时及通信延时问题.
2.2 控制策略设计
式(1)的系统中,G2、G1、F2、F1、H、φ1均为已知常数矩阵,ξ为随机未知扰.此系统为三阶系统,故而可分四步为其设计基于事件驱动的自适应反步控制策略.前三步分别考虑三个状态方程,得出反步控制律,并设计自适应律,第四步为系统设计事件驱动控制架构下的实际控制律,并明确驱动事件.具体如下:
(1)定义误差变量Ei,i=1,2,3:
E1=X1-X1ref
(2)
E2=X2-X2ref
(3)
E3=X3-X3ref
(4)
其中,X2ref和X3ref为虚拟控制量,X1ref为电流参考值.求式(2)的微分,可得:
(5)
取虚拟控制量X2ref为:
(6)
(7)
对于式(7),若E2→0,则E1→0.选取第一步的Lyapunov函数为:
(8)
其中,T表示对矩阵进行转置运算.求微分可得:
(9)

(10)
(2)设计虚拟控制律X3ref:
对式(3)求导可得:
(11)
选取虚拟控制量X3ref为:
(12)

(13)
选取第二步Lyapunov函数为:
(14)
对V2求导,经过与第一步的相似推导可得:
(15)
(3)设计控制律U:
对式(4)求导可得:
(16)
设计控制律U为:
(17)

(18)
选取第三步Lyapunov函数为:
(19)
对V3求导并化简可得:
(20)
根据式(20),设计自适应律为:
(21)
将自适应律代入式(20),可得V3的导数为:
∀E≠0
(22)
将式(17)所示控制律及式(21)所示自适应律应用于式(1)中系统时,在动态过程中可保证误差有界,稳态时可使得系统在平衡点E=0处稳定.上述三步骤中的计算过程均为离线推导过程,在线仅需按照离线推导公式计算控制律(17)和自适应律(21)即可.
(4)设计事件驱动控制架构下的实际控制律Uy
所设计的事件驱动控制思路为,仅当所设计的事件驱动机制中误差大于阈值时,计算、改变输出控制律,以减少冗余计算次数.依据式(17)中自适应反步控制律U,设计式(1)中系统的事件驱动自适应控制律Ue为:
(23)

(24)
驱动事件定义为:
Uy(t)=Ue(tj),∀t∈[tj,tj+1)tj+1=
inf{t∈||e(t)|≥m},t1=0
(25)

3 仿真验证
为了验证所设计事件驱动自适应反步控制策略的有效性,在MATLAB/Simulink中建立带LCL滤波的变换器并联系统模型.模型参数如表1所示.

表1 系统仿真模型参数
首先,为验证本文方法避免系统控制律冗余计算的效果,仿真中,将本文设计的事件驱动反步控制方法与时间驱动反步控制方法的控制律计算频率作一比较.
该仿真中设置事件驱动控制策略中的事件驱动参数,使得事件驱动反步控制策略控制动态性能和稳态性能均与时间驱动反步控制策略相一致.在此基础上测试两种方法控制律更新次数.
仿真中设置两次事件分别为变换器参考值发生阶跃突变.初始时刻,变换器输出参考为一预设值,0.2 s时,变换器参考值阶跃变化,0.4 s时,变换器参考值恢复初始状态.事件发生时,事件状态标志信号设置为1,无事件时,事件状态信号设置为0,如图2所示.
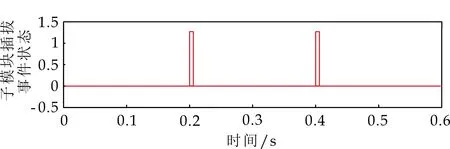
图2 仿真中预设事件状态
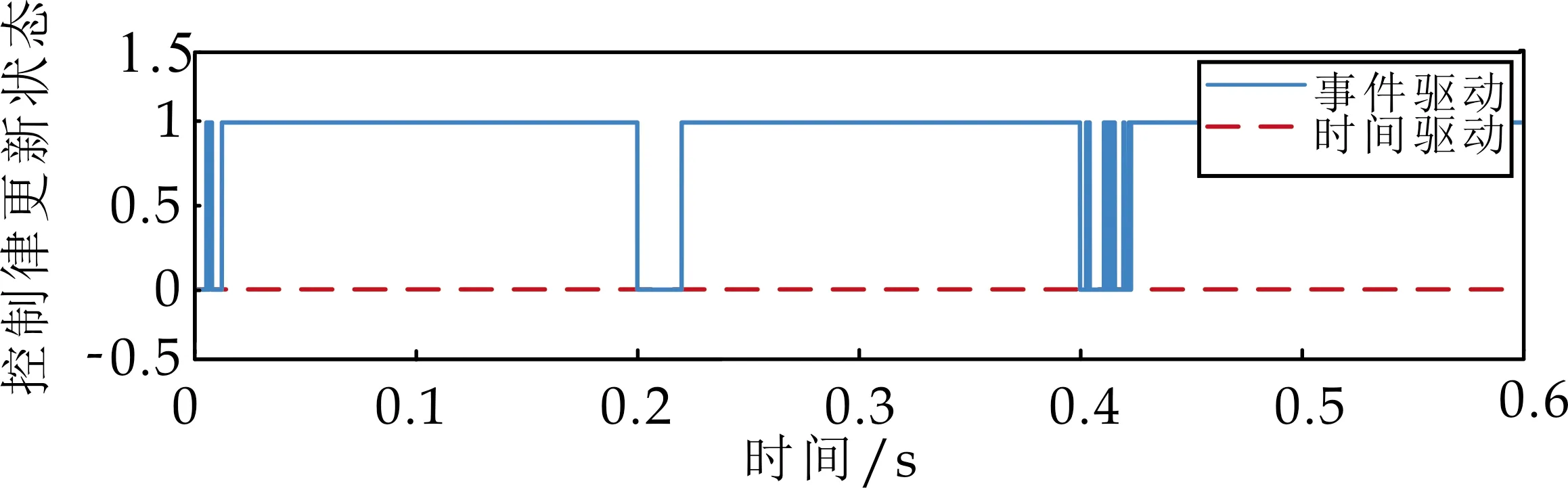
图3 变换器的控制律更新状态
由图3可知,采用时间驱动反步法时,在变换器接入系统时,控制律始终保持计算更新状态:采用事件驱动反步法时,控制律仅在初始状态(0 s)和事件发生时刻(0.2 s和0.4 s)时连续更新计算,当系统进入稳态时,控制律不再计算.在IPOP系统并联子模块插拔事件中,达到相同控制性能时,相比较于时间驱动控制方法,事件驱动控制算法控制律计算、更新次数减少了50%以上,大大减少了控制律冗余计算次数.
图4(a)为设置的系统输出电流参考值,在0.02 s时设置参考电流幅值、相位均阶跃突变,0.04 s时,恢复初始状态.电流输出控制结果如图4(b)~(d)所示,其中图4(b)所示为静态解耦控制策略的控制结果,图4(c)为本文方法控制结果,图4(d)为0.04 s时刻的动态过程.由图4可知,本文方法在稳态跟踪性能上与静态解耦方法基本一致,但调节时间大大缩短.
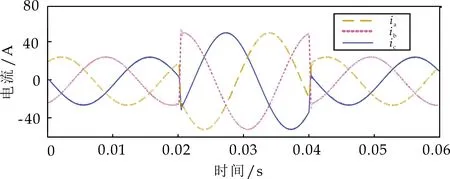
(a)电流参考曲线
通过静态解耦控制方法与时间驱动反步控制方法相比较可知:(1)本文设计的事件驱动自适应反步控制策略与静态解耦控制策略相比,稳态跟踪性能基本一致,但是大大减少了调节时间,提高了动态控制性能;(2)本文设计的事件驱动自适应反步控制策略与时间驱动自适应反步控制策略相比,在稳态性能和动态性能相一致的情况下,本文方法有效减少了算法控制律的计算次数,提高了系统的计算效率,节省了计算资源.
本文方法的系统输出功率控制结果如图5所示.可见,在提高动态性能、减少控制律计算次数的前提下,有功功率和无功功率均可随电流参考变化而变化,快速达到新的稳定状态.
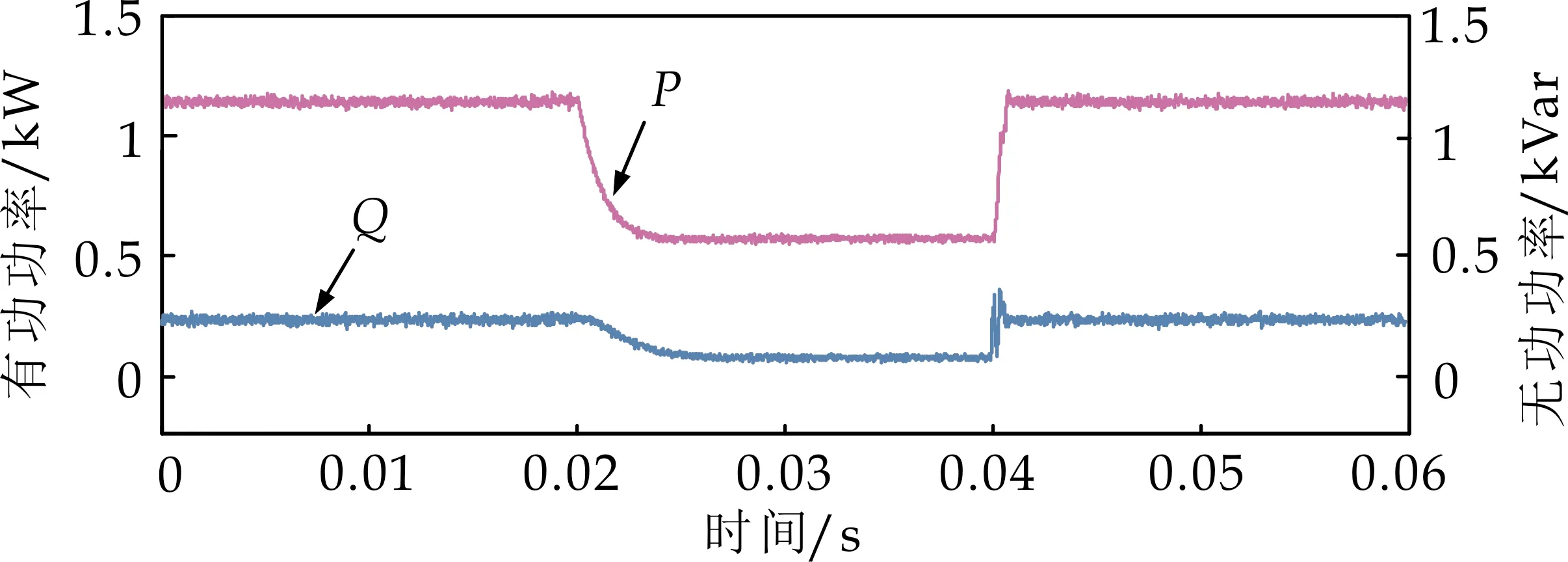
图5 功率输出响应曲线
4 结论
为解决多变换器控制网络中通计算延时、通信延时问题,本文提出了一种电压源变换器装置级事件驱动控制策略.方法首先建立了包含系统未知扰动的变换器系统数学模型; 其次,设计了基于误差的事件驱动机制,以减少控制过程中的冗余计算; 最后,结合事件驱动机制, 针对子模块模型设计事件驱动自适应反步控制策略.
仿真结果表明,本文所提事件驱动控制策略可以有效减少控制律更新次数,节省计算资源、减少计算延时和通讯延时,与传统静态解耦方法相比较,本文方法具有更好的动态响应性能、更高的计算效率和更好的稳态性能.
