融合空间信息的交通流构造方法
2021-07-19范金斌蒋云良张雄涛
范金斌,蒋云良,张雄涛
(1.浙江师范大学 数学与计算机科学学院,浙江 金华 321000;2.湖州师范学院 信息工程学院,浙江 湖州 313000)
在智能交通系统中[1],交通流量预测问题是根据历史交通流量数据、训练模型,并由模型来预测交通流量数值的.当前解决交通流量预测问题的模型采用的是一种深度学习方法,分别设计获取时序特征的神经网络模块和空间特征的神经网络模型,最后给出交通流量预测结果.Yu等较早提出将深度神经网络模型用于预测交通流量,分别采用时序卷积网络和图卷积网络获取时序特征及空间特征[2];Li等结合扩散过程和时序网络有效处理时空数据[3];Zheng等提出了深度网络模型[4];Guo等提出采用深度网络模型设计两个独立的神经网络模块,以分别获取时序特征和空间特征[5];2020年,Huang等提出采用深度结构方法从分离的时序信息和空间信息中获取时空特征,以完成交通流量预测问题[6].虽然越来越多的研究从模型设计角度提高了交通流量预测的准确性,但鲜有研究从数据预处理角度来处理具有复杂时空关系的交通数据[7].
1 相关符号与构造方法的意义
1.1 符号与基本操作
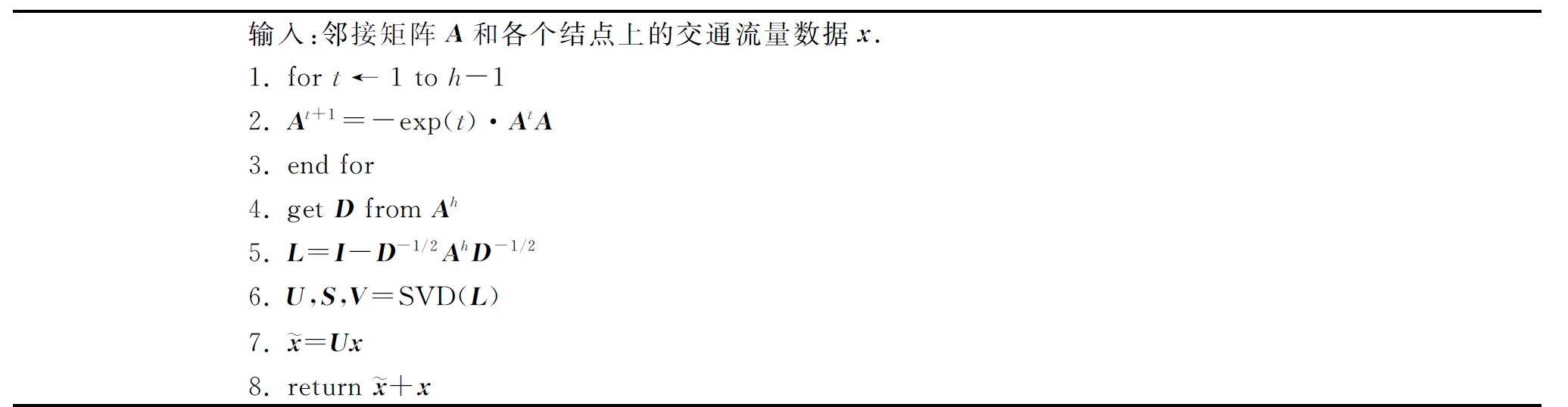
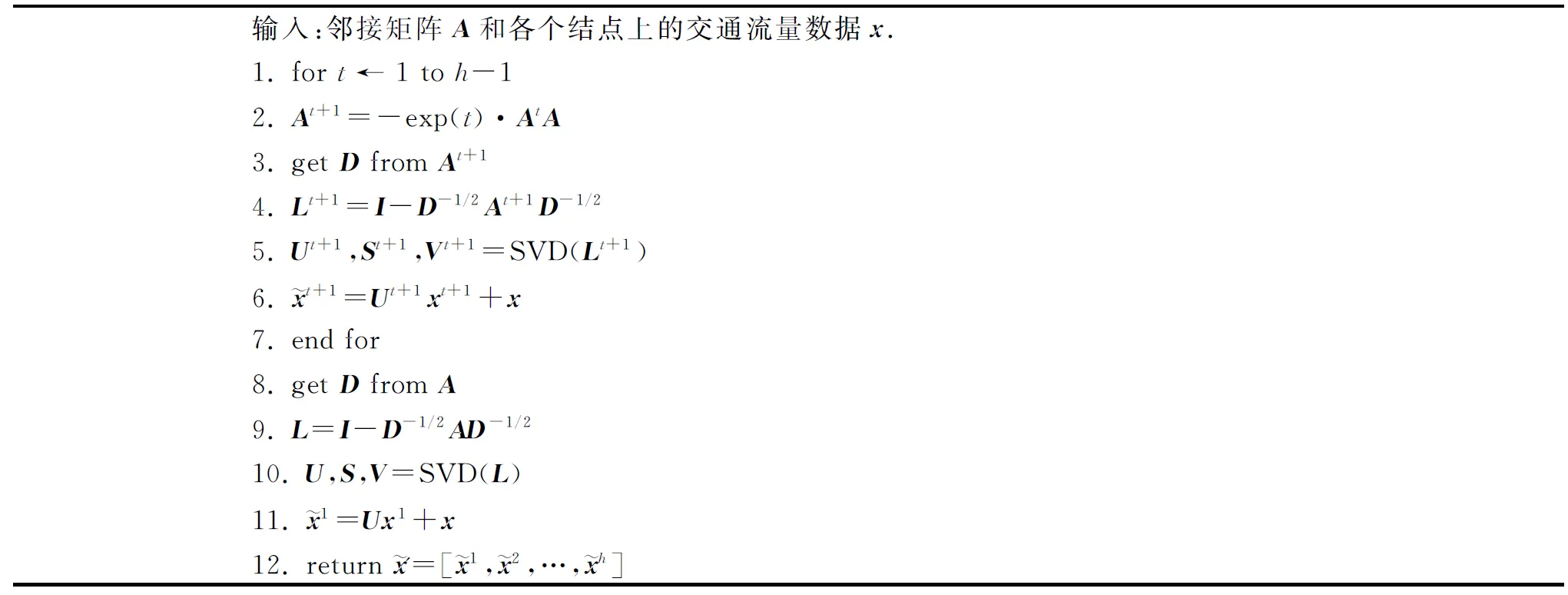
本文需要将路网建模为如图1所示的拓扑图G,其中,监测点作为拓扑图上的结点,监测点间的联系作为拓扑图上的连边.所构建的拓扑图各个顶点的特征x,由包含h个时刻的一段交通流量表示.拓扑图上各结点间的连接关系采用邻接矩阵A表示[2].基于此,h个时刻后的可达矩阵可表示为Ah;t(1 表1 主要符号和算符 图1 拓扑图、图上结点特征以及图上邻接矩阵Fig.1 Graph, features of nodes over graph, adjacency matrix 现有的交通流量预测方法均需从时空特征提取角度构建模型,因此需要设计大量的能获取时序特征和空间特征的网络模块.但设计网络模块往往需要大量的时间和精力,需要在真实场景下反复验证网络模型的有效性、可用性等.此外,采用不同的网络模块虽能获取时序特征和空间特征,但所获取的时空状态存在偏差[8].基于此,本文在保留交通流量时序信息的情况下,融合交通场景下的空间信息,构造兼具时空信息的交通流量数据集.采用此方法构造的数据集不但有助于简化模型设计过程,而且有利于同时获取时空特征,从而借助更准确的时空特征解决交通问题.在交通流量预测问题上,本文采用传统机器学习方法对所提出的构造方法进行验证.由实验结果可知,结合空间信息,尤其是在多个时空下的空间信息,可有效提升交通流量预测效果. 为构造同时具有时序信息和空间信息的交通流量数据集合,本文提出两种融合空间信息的数据集构造方法:一种是基于h跳的可达矩阵和h段的历史观测数据,采用图傅立叶变换得到包含时空信息的交通流量数据;另一种是对每一时刻的可达矩阵和当前时刻的历史观测数据执行图傅立叶变换,得到更准确的时空信息,从而构造具有h段的交通流量数据. 基于h跳可达矩阵构造具有融合空间信息的交通流量数据(Datasets with Acc).该构造方式中的可达矩阵结合了真实场景下的交通流量移动方式,并采用如下方式获取每一跳的可达权重: Ah=exp(-h)·Ah-1A, (1) 其中,衰减因子h采用跳跃步长表示,即跳跃步长越大,两个结点间所分配的权重越小.衰减过程可以很好地反映交通流量在各节点间的流动情况. 在获得h跳可达矩阵Ah后,结合包含时序信息的交通流量数据x对拓扑图网络执行图傅立叶变换,获得包含时空信息的交通流数据集.基于可达矩阵Ah,可通过如下方式获取拉普拉斯矩阵L: L=I-D-1/2AhD-1/2, (2) 其中,D为对角度矩阵,即对角元素对应的Ah的每行求和,非对角元素为零.再对拉普拉斯矩阵进行特征分解,得: L=UΛUT, (3) 其中:U为傅立叶空间中的特征矩阵;Λ为相应的特征值矩阵.拓扑图上的图傅立叶变换操作可采用如下方式进行: (4) 表2为基于h跳可达矩阵融合空间信息的构造方式;表3为基于多个可达矩阵融合空间信息的构造方式. 表2 基于h跳可达矩阵融合空间信息的构造方式 表3 基于多个可达矩阵融合空间信息的构造方式 基于多个可达矩阵构造具有融合空间信息的交通流量数据(Datasets with Multi-Acc).为更准确地获取不同时段上的时空信息,本文对每一时段上的拓扑数据图进行傅立叶变换.对某一时段t上的拓扑图利用式(1)获取可达矩阵At;基于可达矩阵At计算得到对应的对角度矩阵、拉普拉斯矩阵,从而得到所需的傅立叶空间内的特征矩阵Ut;基于上述相同方式得到傅立叶空间中的特征矩阵Ut,对t时段下的拓扑图进行图傅立叶变换,并结合原始交通流量,即 (5) 本文使用加州第三区开源交通流量数据集,收集于Caltrans Performance Measurement System(PeMS)平台.所用数据集(PeMS03)包含2018年1月份的交通流量,同时覆盖主干道上的555个监测点.本文对PeMS03数据集采用如下不同的构造方式: (1) 仅包含时序信息的构造方式(Datasets with None),即包含历史观测数据x. (2) 基于邻接矩阵融合空间信息的构造方式(Datasets with Adj),即对邻接矩阵和历史观测数据x执行图傅立叶变换得到新的样本. (3) 基于h跳可达矩阵融合空间信息的构造方式(Datasets with Acc),即本文所提出的一种数据构造方法,其中h的选定由预测长度确定.本实验部分是预测6个时段后的预测片段,因此h的选择为6. (4) 基于多个可达矩阵融合空间信息的构造方式(Datasets with Multi-Acc),即本文所提出的另一种数据构造方法. 以上4种不同的数据集构造方法,将在交通流量预测问题上采用支持向量回归(support vector regression,SVR)和梯度提升模型(gradient boosting regressor,GBR)作为训练模型,以验证本文所提出的数据集构造方法的有效性. 具体的模型设置和训练过程参照如下方法: 所选用的SVR模型和GBR模型采用scikit-learn中已实现的模型,并设置默认参数,其中的SVR核函数设置为线性核函数.实现的方法是对随机的监测点进行训练并完成测试,具体以所选监测点60%的构造数据作为训练样本,剩余的构造数据作为测试样本. 模型评估采用平均绝对误差(mean absolute error,MAE)和均方根误差(root mean square error,RMSE)两个数据评价指标: (6) 本文随机选取3个监测点,得到如表4、表5、表6中的实验结果.总体看,包含空间信息的数据构造方法能有效提升交通流量预测的准确率;在空间信息中考虑多跳和每一跳的时序信息更有利于交通流量预测.在不同的监测点,不同的数据构造方法对未来交通流量的预测有不同影响. 表4 在监测点105号上SVR的评价结果 表5 在监测点516号上SVR的评价结果 表6 在监测点319号上SVR的评价结果 由表4可知,对监测点105号提出的两种融合空间信息的数据构造方法,在相同的实验条件下,能在交通流量预测问题上表现出更好的预测效果,特别是基于多个可达矩阵的数据构造方法比仅包含时序信息数据的构造方法有了显著的提升;在该监测点上,通过单一时刻空间信息的邻接矩阵或多个时刻空间信息的可达矩阵来实现空间信息融合,同样优于反包含时序信息的数据构造方法,但不及基于多个可达矩阵的构造方式;在该监测点上,融合更多时刻上的空间信息更有利于模型对交通流量的准确预测. 表5中,基于h跳可达矩阵的构造方式,采用SVR模型预测监测点516号的交通流量,展示出的评价结果最好.由于监测点在空间上存在差异,因此不同的空间信息在表示空间联系时存在差异,从而模型也会给出不同的预测结果.但融合更多时段上的空间信息仍被证明有助于模型给出准确的交通流量预测.此外,表6给出的实验数据结果也证实了表4的结论. 除采用SVR模型验证所提出的交通流量构造方法的有效性外,本文还采用GBR模型验证所提出的交通流量构造方法,结果如图2、图3、图4所示.由图2可见,基于h跳可达矩阵融合空间信息的构造方式,在实验中表现出的实验结果最好.在监测点14号上,空间信息采用h跳可达矩阵更易表示,也便于模型更好地获取时空特征,并给出准确的交通流量预测值.在监测点327号和140号上,模型则从本文的另一种数据构造方法中获取更准确的时空特征,并给出更准确的未来交通流量.可见,本文提出的融合空间信息有助于解决传统模型无法解决的交通流量预测问题. 图2 在监测点14号上GBR的评价结果Fig.2 The evaluation results of GBR on the 14th monitor 图3 在监测点327号上GBR的评价结果Fig.3 The evaluation results of GBR on the 327th monitor 图4 在监测点140号上GBR的评价结果Fig.4 The evaluation results of GBR on the 140th monitor 从上述实验结果可以看出,融合空间信息有利于传统模型给出更准确的交通流量信息;结合多个时段上的空间信息更能表示真实场景下的空间特征,更有利于提升模型预测的准确性.因此,融合空间信息的交通流量构造方法,可直接采用传统模型解决现有问题,简化了模型设计过程. 本文提出了两种融合多个时刻空间信息的数据集构造方法,即基于h跳可达矩阵融合空间信息的构造方式和基于多个可达矩阵融合空间信息的构造方式.这两种数据构造方法融合了更多空间信息,简化了模型设计,并可采用传统机器学习方法,即基于所构造的数据集解决现有交通问题.此外,该数据构造方法有助于模型同时获取时空信息. 基于已提出的数据集构造方法,我们将会在更多的模型及交通流量场景下对数据集构造方法进行优化,尤其是要通过构造邻接矩阵来更准确地表示各监测点间的差异,从而提升该数据构造方法在整个路网上的预测效果.

1.2 融合空间信息的意义
2 融合空间信息的构造方法
3 实验分析
3.1 实验设置
3.2 结果分析





4 结 语
