混流式水轮机空化声发射信号的混沌特性分析
2021-07-17邹淑云李志鹏
刘 忠,蒋 盈,邹淑云,陈 莹,刘 振,李志鹏
(1. 长沙理工大学 能源与动力工程学院, 长沙 410114; 2. 中国水利水电科学研究院, 北京 100038)
水轮机内发生空化时,伴随着空泡的产生、发展和溃灭。空泡(群)的存在会造成水体压力波动,水轮机能量特性降低,并影响机组安全稳定运行。空泡(群)溃灭形成的冲击波或者微型射流甚至会造成过流部件表面破坏,使得机组使用寿命大幅度缩短[1]。声发射(Acoustic Emission,简称AE)作为一种新型的无损检测技术,不受结构、地形和环境的影响,能避开低频信号的干扰。水轮机发生空化的过程中会产生频率范围为20 kHz~1 MHz的AE信号,沿着水流及机械结构系统传播。因此,AE技术可用于水力机械的空化监测研究[2]。空泡的产生与溃灭几乎是瞬间完成的,其声信号具有很强的非线性和非平稳性[3]。混沌理论在非线性问题研究中有较强的适应性,有力地推动了包括空泡(群)非线性动力学行为在内的研究。沈壮志等[4]将混沌理论应用到声场气泡运动特性研究中,研究了气泡运动的影响因素以及影响程度,得到声场中气泡运动的混沌动力学特性。兰朝凤等[5]对水轮机在偏工况运行时的尾水管压力脉动信号进行混沌动力学特性分析,证明利用最大Lyapunov指数(LLE)可以对水轮机空化低频压力脉动信号进行定量分析。夏伟等[6]对湍流速度时间序列进行相空间重构,证明了关联维数和最大Lyapunov指数等混沌特征参数的强弱能够反映湍流涡结构在空间上耗散和消亡的变化规律。
目前,采用混沌理论研究水轮机空化AE信号的研究成果尚不多见。笔者针对混流式水轮机模型空化试验中不同空化阶段典型测点的AE信号,提取其最大Lyapunov指数和关联维数,分析这2种混沌特征参数随空化状态的变化规律。
1 基本理论
1.1 相空间重构
相空间重构是指通过一维时间序列反向构造出原系统的相空间结构,将时间序列具有的混沌特征轨迹(即“吸引子”)恢复出来,其关键在于延迟时间τ和嵌入维数m这2个重构参数的选取。合理确定τ值,可使重构的坐标之间最大限度地相互独立,同时保持各坐标之间的动力学关系;合理确定m值,可将吸引子的几何结构完全打开,同时最大限度地控制噪声的影响。在实际应用中,常分别采用互信息法与虚假最近邻点法来确定最佳延迟时间τo与最佳嵌入维数mo,主要步骤为[8]:
(1) 设时间序列x(t)=[s1s2…sn]和延迟时间序列x(t+τ)=[q1q2…qm]构成系统S和Q,根据信息论计算S和Q的互信息I(S,Q):
(1)
式中:ps(si)和pq(qj)分别为事件si和qj的概率;psq(si,qj)为事件si和qj的联合分布概率。
(2) 选择I(S,Q)的第一个局部极小值点所对应的时间作为最佳延迟时间τo。
(3) 将步骤(2)计算得到的τo作为输入,计算m维相空间中每个相点矢量X(k)=[x(k),x(k+T),…,x(k+(m-1)T)](T为采样间隔时间)与其最近邻点XN(k)的欧氏距离Rm(k):
(2)
当相空间的维数由m维增加到m+1维时,计算2个相点的距离Rm+1(k),有:
(3)
(4) 设定阈值RT∈[10,50],令:
(4)
若Sm>RT,则XN(k)是X(k)的虚假最近邻点。
(5) 从m的最小起始值开始,计算虚假最近邻点的比例,即假近邻率。逐渐增大m的值,直到假近邻率首次小于5%,此时的m值即为最佳嵌入维数m。
(6) 对长度为N的时间序列x设置τo和mo,进行相空间重构,重构相空间中总点数M为:
M=N-(mo-1)×τo
(5)
则重构信号为:
X(m,j)=x[(m-1)×τo+j]
(6)
式中:m=1,2,…,mo;j=1,2,…,M。
1.2 关联维数
关联维数(Correlation Dimension,简称DC)反映系统耗散能变化。DC越大,系统耗散能越大;反之,系统耗散能越小[9]。饱和关联维数法(GP算法)常用于计算DC,其计算步骤为[10]:
(1) 对重构信号X求取关联积分C(m,r):
(7)
式中:θ()为Heaviside单位函数;r为邻域半径;|Xi-Xj|为两相点矢量Xi与Xj之间的距离。
(2) 作lnC~lnr双对数图,去除斜率为0和无穷大的部分,对该曲线的近似线性区进行线性回归,其斜率即为所求的关联维数DC。
1.3 最大Lyapunov指数
最大Lyapunov指数能够定量描述初值条件敏感性,并能衡量系统的动力学特性。LLE>0代表系统具有混沌特性,且LLE越大,混沌程度越大[11]。计算LLE一般优先采用小数据量法,主要步骤为[12]:
(1) 对重构信号X在相空间中的每个相点Xj,找到该相点矢量的最近邻点Xj′,计算两点之间的欧氏距离dj(0),即:
(8)
(2) 计算相空间中每个相点与其最近邻点之间的i个离散步后的欧氏距离:
(9)
式中:i=1, 2,…, min(M-j,M-j′)。
(3) 对所有的i,求出所有j的lndj(i)的平均值Y(i):
(10)
式中:q为非零dj(i)的数目;Δt为演化时间步长增量。
(4) 采用最小二乘法作回归直线,其斜率即为所求的最大Lyapunov指数。
2 空化AE信号的混沌特性分析方法
基于混沌理论的水轮机空化AE信号特性分析方法的流程如图1所示,具体步骤如下:

图1 水轮机空化声发射信号的混沌特性分析方法流程
(1) 混沌性检验:计算水轮机空化试验AE信号的LLE,检验其混沌性。
(2) 相空间重构:采用互信息法计算τo,采用虚假最近邻点法计算mo。
(3) 计算重构信号的混沌特征参数:采用小数据量法计算信号的LLE,采用GP算法计算信号的DC。
(4) 混沌特征分析:绘制LLE和DC与空化系数的关系曲线,分析这2种混沌特征参数随空化程度变化的规律,获取水轮机空化AE信号与空化状态之间的对应关系。
3 空化AE信号的获取与初步分析
3.1 基于水轮机模型试验的空化AE信号获取
3.1.1 试验系统简介
在国内具有国际先进水平的闭式水力机械试验台上进行了混流式水轮机模型空化试验[13]。采用闪频仪观测水轮机流态,采用自主开发的AE信号采集与分析系统(基本信息见表1)采集信号。

表1 声发射信号采集装置
传感器采用SR-150M型声发射传感器,其频响范围为60~400 kHz,中心频率为150 kHz,灵敏度>-65 dB。为减少信号在水轮机流道和部件的衰减,将2套声发射传感器分别布置在模型水轮机导叶拐臂和转轮下环处(见图2),以保证传感器与声源之间的金属厚度尽可能小且距离空化发生部位尽可能近。

(a) 导叶拐臂处

(b) 转轮下环处
选取偏离设计工况且对应于不同导叶开度(a01、a02)和单位转速(n111、n112、n113)的6组试验工况点,如图3所示,图中横坐标qV,11为单位体积流量,纵坐标n11为单位转速。

图3 试验工况点示意图
3.1.2 空化状态划分
将3个转轮叶片上出现空泡判断为初生空化,相应的空化系数为初生空化系数σi。将水轮机模型效率降低1%时判断为临界空化,相应的空化系数为临界空化系数σ1。6个试验工况点的特征空化系数见表2。

表2 试验工况点的特征空化系数
以初生空化系数σi和临界空化系数σ1为分界线,将水轮机空化状态分成4种,如表3所示。

表3 水轮机空化状态的划分
3.1.3 空化试验结果
不同的单位流量、单位转速和空化系数构成一个测试工况点。对每个测试工况点重复采集若干组空化AE信号,得到各工况点水轮机效率η与空化系数之间的关系曲线,如图4所示。由图4可知,工况点1~工况点6的空化特性曲线变化趋势大体一致。随着空化系数的减小,从未空化状态到初生空化状态,空化程度增加,水轮机效率曲线变化平缓;空化发展阶段,水轮机效率有短暂上升的趋势,在临界空化附近达到最大;临界空化后,空化更加严重,水轮机效率迅速下降。

图4 各试验工况点的空化特性曲线
3.2 空化AE信号的降噪处理
为准确分析空化AE信号的动力学特征,需对空化AE信号进行降噪处理,以提高其信噪比。利用经验模态分解阈值降噪算法[14]对采集到的空化AE信号进行降噪处理。图5为工况点2的4个不同空化状态下降噪后的空化AE信号。

(a) 未空化

(b) 初生空化

(c) 空化发展

(d) 严重空化
由图5可知,在空化程度逐渐增加的过程中,信号幅值先增大后减小,在临界空化附近达到峰值,临界空化后到严重空化状态有回落趋势。
3.3 空化AE信号的混沌性检验
在混沌理论里,任何包含至少1个正的最大Lyapunov指数的系统被定义为混沌系统[15]。混沌性检验是后续利用混沌理论开展相空间重构和混沌特征分析的前提。因此,计算工况点1~工况点6中未空化和已空化时AE信号的LLE,结果见表4。
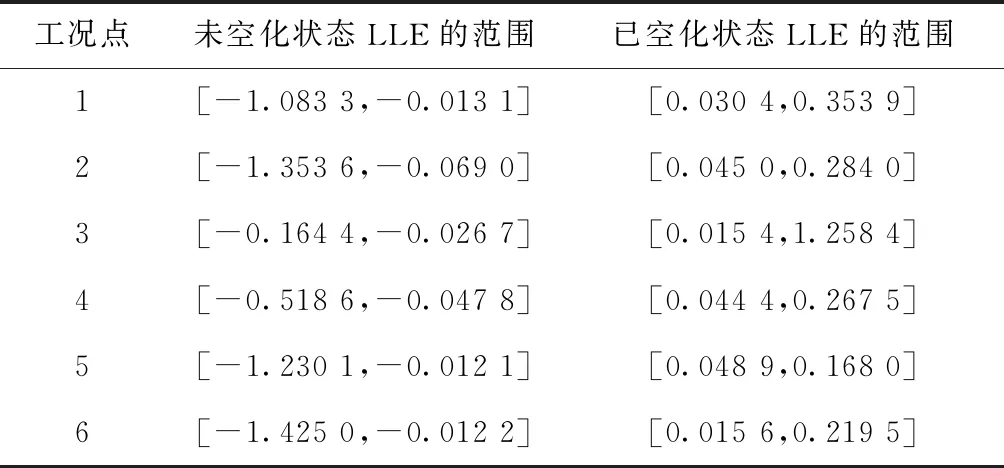
表4 工况点1~工况点6空化数据LLE的范围
由表4可知,工况点1~工况点6已空化序列的LLE均大于0,而未空化序列的LLE均小于0。该结果表明,混流式水轮机空化AE信号具有混沌性,可用LLE参数定性地判断空化发生与否。
4 空化AE信号的混沌特性分析
4.1 相空间重构
以工况点2初生空化状态的一段数据为例,计算得到延迟时间与互信息函数之间的关系,如图6(a)所示,可知最佳延迟时间τo=4。计算得到嵌入维数与假近邻率的关系,如图6(b)所示,可知最佳嵌入维数mo=10。
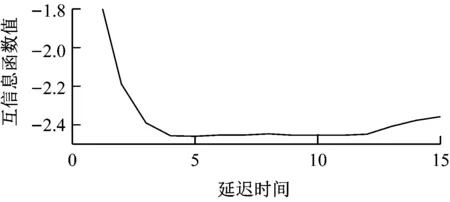
(a) 互信息与延迟时间

(b) 假近邻率与嵌入维数
采用互信息法和虚假最近邻点法,依次计算各空化数据的最佳延迟时间τo和最佳嵌入维数mo,进行相空间重构。2种重构参数与空化系数的关系如图7所示,6个工况点的τo和mo随空化系数变化的规律大体一致,说明重构参数对空化AE信号所蕴含的空化程度信息具有较高的敏感性,也间接说明笔者所进行的相空间重构工作的有效性。此外,所有的延迟时间不超过10,所有的嵌入维数不超过11,故在算法实现时可设定计算范围,以实现算法的快速有效。

(a) 最佳延迟时间与空化系数的关系

(b) 最佳嵌入维数与空化系数的关系
4.2 关联维数特征分析
对上述初生空化数据的重构信号求取关联积分,得到lnC~lnr关系曲线,如图8所示,其近似线性区的拟合曲线斜率为5.659 4,即该数据的关联维数DC=5.659 4。

图8 ln C~ln r双对数曲线
为探究DC随水轮机空化程度的变化规律,选取同一导叶开度、不同单位转速对应的工况点1~3以及同一单位转速、不同导叶开度对应的工况点2和工况点5进行对比分析,对4个空化状态的数据进行DC计算,绘制DC-σ关系曲线,如图9所示。

图9 部分工况点的关联维数与空化系数的关系
由图9可知,工况点1~3和工况点5的DC-σ变化规律如下。
(1) 整体趋势
随着空化系数逐渐减小,空化程度增加,4个工况点的DC-σ关系曲线的变化趋势大体一致,整体上呈现上升的趋势,即耗散能越来越大。未空化阶段:DC特征值随空化系数的减小而增大,耗散能不断增加,表明水轮机由未空化到初生空化的过程中,水流逐渐不平稳。初生空化阶段:DC特征值在初生空化附近达到某一极大值,即耗散能达到局部最大值,此时空泡开始产生和溃灭,导致局部出现了气液两相流,破坏了水流的平稳性。空化发展阶段:初生空化后到临界空化前,DC特征值有短暂减小的趋势,即耗散能呈现减小的趋势,这与图4的空化特性曲线得出的结论一致,此时水轮机效率有短暂上升的趋势。严重空化状态:临界空化后,DC特征值呈现急剧增大的趋势,即耗散能大幅增加,此时空化发生剧烈,水轮机效率下降超1%,水流状态紊乱。
(2) 对比同一导叶开度下不同单位转速
对比工况点1~3的DC-σ关系曲线,工况点2的DC-σ曲线规律性较工况点1和工况点3明显。除了初生空化状态附近外,工况点2 的DC-σ关系曲线均处于工况点1和工况点3的下方,即整体而言工况点2的耗散能较小,与图4空化特性曲线得出的结论一致,工况点1和工况点3的水轮机效率整体均不如工况点2。
(3) 对比同一单位转速下不同导叶开度
对比工况点2和工况点5的DC-σ关系曲线,工况点2 的DC-σ曲线处于下方,即工况点2的耗散能整体低于工况点5,与图4的空化特性曲线得出的结论一致,工况点2 的水轮机效率均高于工况点5。
综上所述,DC特征值随空化系数的变化规律明显,各工况点DC-σ关系曲线整体趋势一致,在初生空化和临界空化状态附近,DC特征参数对空化状态改变的敏感性均很高。比较导叶开度与单位转速对DC特征参数的影响,可知同一单位转速下不同导叶开度的DC-σ关系曲线的变化规律更为相似,即DC特征参数受单位转速的影响更大。虽然关联维数特征参数随空化状态改变的规律明显,但是仅靠这单一特征参数不足以说明混沌特征能够定量描述空化程度。因此,引入LLE混沌特征。
4.3 LLE特征分析
以工况点2未空化阶段和空化发展阶段的AE重构信号为例进行LLE计算,得到Y(i)与离散步数i的关系,如图10所示,其斜率即为所求LLE。

(a) 未空化状态

(b) 空化发展状态
分别用最小二乘法拟合,图10(a)的拟合斜率为-0.069 0,即该未空化状态AE信号的LLE为-0.069 0;图10(b)的拟合斜率为0.045 0,即该空化发展状态AE信号的LLE为0.045 0。
为了探究LLE随水轮机空化程度的变化规律,选取同一导叶开度、不同单位转速对应的工况点1~3以及同一单位转速、不同导叶开度对应的工况点2和工况点5进行对比分析,对4个空化状态的数据进行LLE计算,绘制LLE-σ关系曲线,如图11所示。

图11 部分工况点的LLE与空化系数的关系
由图11可知,工况点1~3和工况点5的LLE-σ变化规律如下。
(1) 整体趋势
随着空化系数逐渐减小,空化程度增加,4个工况点的LLE-σ关系曲线的变化趋势大体一致,呈现上升的趋势,即混沌程度越来越大。未空化阶段:LLE<0,LLE逐渐增大至接近0,增幅较小,水流状态较为平稳。初生空化阶段:LLE非常接近0,增幅很小,在初生空化点附近,LLE由负变正,系统过渡到混沌,空泡开始出现,使得水流与流道和转轮叶片之间的作用以及水流内部的作用开始变得复杂。空化发展阶段:LLE>0,空化程度增大,LLE持续增大,混沌程度不断增加。此时,空泡的产生、成长、挤压和溃灭作用加剧了局部气液两相流程度,水流流态的紊乱程度持续增大。严重空化阶段:临界空化后,空化发生剧烈,水轮机效率下降超1%,LLE较之前大幅增长,混沌程度大幅增加,水流流态更加紊乱。
(2) 对比同一导叶开度下不同单位转速
工况点1和工况点3的LLE-σ关系曲线明显位于工况点2上方,即从未空化状态开始,工况点1和工况点3的混沌程度明显高于工况点2,水流状态不如工况点2平稳。
(3) 对比同一单位转速下不同导叶开度
工况点2 的LLE-σ关系曲线略低于工况点5,即工况点2整体混沌程度略低于工况点5,工况点2的水流状态较工况点5更为平稳。
综上所述,LLE特征参数随空化系数的变化规律明显,各工况点LLE-σ关系曲线的整体变化趋势一致,在初生空化和临界空化状态附近,LLE特征参数对空化状态改变的敏感性均很高。LLE混沌特征不仅能够定性地描述水轮机的空化状态,而且能够定量地描述水轮机空化的严重程度。比较导叶开度和单位转速对LLE特征规律的影响,可知同一单位转速下不同导叶开度的LLE-σ关系曲线的变化规律更为相似,LLE数值大小更为接近,即LLE特征参数受单位转速的影响更大,单位转速对水轮机内水流状态的影响更大,故同时采用DC和LLE能够更为准确且定量地描述水轮机的空化程度。
5 结 论
(1) LLE和DC这2个混沌特征参数互为补充,不仅能够定性地描述水轮机的空化状态,而且能够定量地描述水轮机空化的严重程度,可用于水轮机空化故障的识别。
(2) 比较同一单位转速、不同导叶开度和同一导叶开度、不同单位转速的LLE-σ与DC-σ关系曲线可知,混沌特征规律受单位转速的影响较大。
(3) 相空间重构参数对AE信号所蕴含的空化程度信息具有较高的敏感性。今后可利用深度学习领域的相关方法完成相空间重构参数的快速获取,以实现水轮机空化故障的实时监测。
