基于频谱分析和卷积神经网络的高速轴向柱塞泵空化故障诊断
2021-07-16魏晓良陶建峰刘成良王立尧
魏晓良,潮 群,陶建峰,刘成良,王立尧
(上海交通大学机械系统与振动国家重点实验室,上海 200240)
引言
空化是指油液局部压力低于其饱和蒸气压时,溶解于油液中的空气大量析出形成气泡或者空穴的现象。气泡的产生和溃灭会产生剧烈的振动和噪声,同时对零部件造成冲击,形成气蚀破坏;其次,空化的发生会降低泵的流量和容积效率,影响相关液压系统的正常工作,甚至导致严重的事故。研究表明,转速是空化发生的影响因素之一,转速越高发生空化的可能性和剧烈程度越高。因此,需要对高速轴向柱塞泵的空化故障进行有效的诊断,避免空化带来的危害[1-2]。
空化现象会造成零部件的异常振动,因此可以通过挖掘故障发生时零部件的振动信号特征进行空化故障的诊断[3]。在泵的故障诊断领域,研究主要集中在信号特征挖掘、分类器优化两方面[4-6]。MCKEE等[7]通过在离心泵轴轴承、入口法兰和出口法兰位置处采集泵的振动信号,利用主成分分析方法寻找对空化现象敏感的倍频程频谱特征;AZIZI等[8]利用经验模态分解(Empirical Mode Decom-position,EMD)方法得到IMF分量,把IMF分量的统计特征作为回归神经网络故障分类器的输入,进行离心泵的空化故障诊断;SHERVANITABAR等[9]利用了经验模态分解和希尔伯特黄变换的方法提取振动信号特征,并结合SVM分类器实现对柱塞泵空化程度的诊断。
近年来,卷积神经网络在机械故障诊断领域的应用取得良好的效果。ZHANG等[10]利用一维卷积神经网络建立能适应多工况、噪声环境的轴承故障诊断模型;WEN等[11]把轴承一维振动信号转化为二维灰度图,利用二维卷积神经网络学习灰度图中隐含的特征,实现轴承故障类型的诊断;XU等[12]利用二维卷积神经网络对振动信号的频谱图进行处理,自动学习时频图的特征进行分类。
上述针对泵的空化故障诊断方法,在噪声环境下的诊断准确率面临挑战,并且对高速轴向柱塞泵的空化诊断问题关注较少。本研究提出利用短时傅里叶变换进行时频分析,提取空化故障时的振动信号特征,并结合卷积神经网络进行故障分类的方法。该方法首先对信号进行划分,选择合适的STFT变换参数把时域振动信号转变为频谱图,训练卷积网络模型对不同故障程度的频谱图进行分类,为了提高模型的鲁棒性,对频谱图进行优化处理,最后验证了所提方法在不同信噪比环境下的性能。
1 实验方案和数据采集
柱塞泵空化时的壳体振动信号通过安装在柱塞泵壳体上三轴振动传感器得到,如图1所示。实验用的高速轴向泵参数:9柱塞,额定转速10000 r/min,额定出口压力21 MPa,排量1.2 mL/r,正常运行进口压力0.25~0.30 MPa。通过实验台的溢流阀和电机让泵在额定出口压力和转速下运行,同时利用进口调压阀组使泵的进口压力从额定值开始逐步下降。当泵的进口压力降低时,泵将会发生不同程度的空化,同时利用数据采集模块采集泵空化时的振动信号。
泵在发生空化时,泵的容积效率将会下降。 实验台上装有3个流量计,分别测量泵的进口流量、出口流量和回油流量。通过计算泵的容积损失率作为泵空化等级的评价标准,计算公式如下:
(1)

图1 振动传感器安装位置
式中,n—— 泵的转速
V—— 泵的排量
qt—— 理论进口流量
qin—— 实际进口流量
qd—— 实际出口流量
qr—— 回油流量
根据泵的容积损失率,将不同进口压力下泵的空化程度划分为4个等级,空化程度越严重,容积损失越大,如表1所示,空化等级的划分作为后续模型诊断的标签。需要注意的是,由于式(1)中忽略了泵的死腔容积,无空化情况下的容积损失略大于0。实验采集振动信号的频率是10.24 kHz,每类样本采集点数61440,给出空化时振动传感器X轴的信号,如图2所示。

表1 不同进口压力下泵的空化等级
2 频谱分析和卷积神经网络
2.1 短时傅里叶变换
傅里叶变换是信号分析常用工具,将信号从时域转变到频域,从而使分析信号的频域特征成为可能,定义如下:
(2)
式中,x(t) —— 时域信号
ω—— 频率
t—— 时间
x(ω) —— 傅里叶变换后的频域信号

图2 壳体振动信号
傅里叶变换的本质是用一系列简单的函数的加权和来近似表示复杂的函数,这样的变换可以让一些在时域中难以观察的特征在频域清楚地表现出来。但是傅里叶变换是全局变换,即频域信号上的每个频率对应的函数值都由x(t)全过程的函数值贡献。所以傅里叶变换只是建立了时域和频域的联系,但并不能反映信号频谱随时间的变化。针对傅里叶变换的缺点,短时傅里叶变换定义如下:
(3)
式中,g(t)是分析窗函数,随着τ的不断变化,由g所确定的窗口在时间轴上移动,使分析信号x(t)逐步进入被分析的状态,因此该变换反映了信号x(t)在时刻为τ、频率为ω的分量的相对含量。短时傅里叶变换是能量守恒变换,对任何窗函数,下式都成立:
(4)
在归一化条件下,短时傅里叶变换是可逆的,逆变换公式如下:
(5)
短时傅里叶变换是一种时频变换,适用于分析非平稳信号。短时傅里叶变换的本质是以t和ω为中心、以dt和dω为宽度组成的矩形窗在时、频域平面滑动,在滑动的过程中对矩形窗中的信号进行傅里叶变换。但是,时域窗和频域窗互相之间存在约束,时域窗变窄,频域窗则变宽,不能保证同时提高时间分辨率和频域分辨率,需要针对信号的特征选择合适的参数。
2.2 卷积神经网络
卷积神经网络[13-14]在图片处理和识别方面有广泛的应用,本研究设计的二维卷积神经网络包括卷积层、批标准化层、最大池化层、随机丢弃层,对振动信号转换后的频谱图进行分类识别。
1) 卷积层
卷积层的主要功能是对数据的局部区域和卷积核进行卷积运算后输出,通过设置移动步长让单个卷积核感受野遍历整个输入数据。卷积层的运算如下式所示:
(6)
2) 批标准化层
为了加速模型的训练,引入批标准化层来对数据进行归一化操作,同时带来一定的正则化效果。批标准化的数学公式如下:
(7)
(8)

3) 池化层
引入池化层实现对输入特征的降采样,同时保留突出的特征,能够减少模型参数同时抑制过拟合。采用最大池化,公式如下:
(9)

4) 随机丢弃机制
为了提高模型的鲁棒性,可在卷积神经网络引入随机丢弃机制,让神经元之间权重随机置零。
(10)
(11)

5) 模型输出
采用Softmax评估函数作为模型最后的输出,公式如下:
(12)
式中,yj是输出层第j个神经元输出,m是空化故障程度的数量,p(yj)是神经元经过Softmax的概率输出。
6) 损失函数
空化故障诊断问题是一个多分类问题,损失函数采用多分类交叉熵损失函数,定义如下:

(13)
式中,N表示数据样本数;M是故障类别数量;yic是指示变量,预测类别与样本类别相同取1,反之是0;pic是样本预测类别的概率,由Softmax层输出。
2.3 故障诊断模型
故障诊断模型由卷积神经网络构成,模型的结构如图3所示。模型中的Dropout是随机将神经元连接权重置零,统一设置为0.25。模型中其余各层的参数设置如表2所示。

表2 模型参数设置

图3 故障诊断模型
3 实验结果与分析
3.1 故障诊断流程
采集柱塞泵空化时壳体的振动信号后,按照如下步骤进行数据处理和模型训练。振动传感器能采集3个方向的振动信号,不同方向的振动信号对故障的敏感性不同,经过对比发现,沿壳体径向的振动信号比轴向更敏感,以下分析选择X轴方向振动信号。
(1) 信号切片,把振动信号划分成若干小片段,每个片段作为一个新的样本,切片的原则是至少保留泵转动一圈的振动信号,可按照下式计算,同时考虑后续短时傅里叶变换的快速性,样本点数最好是2的n次方;
(14)
式中,N1—— 每段切片信号包含的点数
k—— 正整数,表示选择转动k圈的信号
v—— 泵的转速,r/min
fh—— 采样频率,Hz
从2.1节可知,时间窗变窄,频域分辨率会降低,因此样本片段长度不宜太短,选择每个片段样本点数为256,大约是4转的振动信号长度,同时兼顾后续傅里叶变换的需要;
(2) 划分数据集,把振动信号片段按照4∶1的比例划分为训练集和测试集,同时保证不同类别的数量均等;
(3) 短时傅里叶变换,对训练集和测试集的每个样本进行频谱分析,得到信号片段的频谱图,数据集的划分如表3所示;
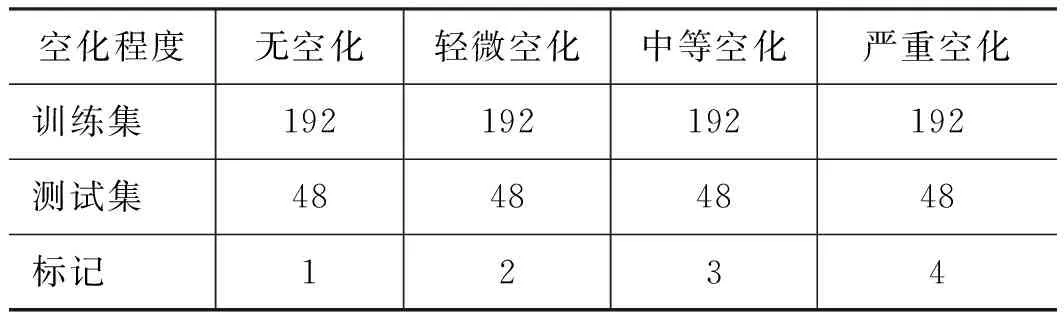
表3 数据集划分

图4 振动信号频谱分析结果
(4) 建立模型,按照第2章节“频谱分析和卷积神经网络”的描述建立模型并训练,模型训练输入是信号转换后的频谱图;
(5) 构造不同信噪比的测试集,并用于模型测试,构造的方法是将原始测试集信号和高斯白噪声信号进行叠加,信噪比的范围是-2~10 dB,然后对测试集数据进行短时傅里叶变换,信噪比定义如下:
(15)
式中,Ps—— 信号功率
PN—— 噪声功率
3.2 频谱分析结果
经过短时傅里叶变换,得到泵在不同程度空化时壳体振动信号的频谱图,如图4所示。在无噪声环境下,不同空化程度的信号频谱图呈现明显的区别,说明短时傅里叶变换能够有效提取空化时的特征。但在有噪声情况下,不同空化程度振动信号的频谱图区分度下降,如图4g和图4h,难以区别,因此有必要对短时傅里叶变换后的频谱图进行处理。
变换后的处理方法,按照式(16)~式(19)进行,分别是频域处理和时域处理。

(16)

(17)
式中,Z(ω,t)是短时傅里叶变换后的结果,h(ω)是频域处理函数,把不是重点频率附近的频谱置零,重点频率带根据泵的转速和柱塞计算得到。
(18)

(19)
式中,Z*(ω,t)短时傅里叶变换经过处理的结果;L(t)是时域处理函数,把对应时刻的小于0.85倍最大幅值的变换结果置零,进一步突出频谱图的特征,减少噪声的干扰。从图4i~图4l可知,经过处理后,不同空化程度的带噪声振动信号频谱图区别较为明显。
3.3 模型诊断结果
利用短时傅里叶变换可以有效提取不同空化程度壳体振动信号的特征,但是从频谱中对故障程度进行人工分类耗费时间。利用卷积神经网络建立的故障诊断模型,可以实现故障诊断的自动诊断。利用样本转换后的频谱图进行模型的训练和测试,在无噪声情况下,模型在测试集的诊断结果准确率A最高可达99.8%,损失函数值C低至0.012,说明故障诊断准确可靠。同时,为了验证模型的抗噪性能,以及验证对频谱图进行后处理的必要性,对比了不同信噪比情况下的模型诊断性能,结果如图5所示。在相同的模型下,短时傅里叶变换+后处理的方法诊断准确率高于单一的短时傅里叶变换,并且在测试集上损失函数值更小。同时在0以上的信噪比情况下,诊断准确率均大于85%,模型的抗噪性能比较高,说明后处理方法显著提升了模型的抗噪性能。

图5 频谱图处理对模型抗噪性能的影响
4 结论
(1) 提出了基于频谱分析和卷积神经网络的高速轴向柱塞泵诊断方法,能够有效提取故障特征,并且避免人工分析频谱图耗时的问题;
(2) 针对单一短时傅里叶变换提取特征方法抗噪性能低的问题,对变换后的频谱进行后处理,能够有效降低噪声对频谱图的影响;
(3) 本研究所提方法的故障诊断准确率高,在无噪声情况下准确率高达99.8%。随着信噪比的降低,模型故障诊断准确率有轻微降低,但在0信噪比情况下,准确率仍高达85%,表明所提方法鲁棒性能好。
