基于速度曲线的高压旧电缆回收装置精准控制策略研究
2021-07-16郑飞勇胡向红潘明珠王华昕
郑飞勇,胡向红,潘明珠,王华昕,黄 兆
(1.绍兴大明电力建设有限公司,浙江 绍兴 312000;2.上海电力大学 电气工程学院,上海 200090)
0 引言
目前,110 kV 及以上高压电缆逐渐成为城市电力电网建设中的重要组成部分。在电缆敷设技术领域中,电缆敷设方法通常有3 种:为人力敷设、机械敷设及人力和机械混合敷设[1]。由于高压电力电缆有大截面、长距离及质量重等特点,一般都采用人力和机械混合敷设方法,但总体工作效率并不高。电缆敷设与回收存在着对称关系,电缆回收技术也能采用电缆敷设相同的技术。但是回收是收的过程,牵引力由大变小;敷设是放的过程,牵引力由小变大。而现在的电缆回收技术并不成熟,在回收过程中容易造成电缆损伤,导致电缆不能二次利用。本文针对110 kV及以上高压旧电缆,自主研发了一套高压旧电缆自动化回收装置。电缆回收速度可在装置中进行在线调整,回收方法由粗放方式转为精准控制。
在电力工程施工中,高压电力电缆敷设的恒速控制大概在6~9 m/min,不宜超过15 m/min[2]。此速度范围是靠现场施工人员的经验得出,高压旧电缆回收可采用相似的速度控制。但在复杂的回收场景下回收电缆时,恒速回收电缆并不合理,在直线回收场景阶段希望回收速度稍快一点,斜坡和水平转弯阶段希望回收速度稍慢一点。针对上述问题,可以对伺服电机进行加减速控制,达到变速回收高压旧电缆的目的,并且合理地对电机进行加减速控制可以有效地避免机械受到柔性冲击,延长系统使用寿命,提高生产效率。国内外的学者对加减速控制的研究领域大致在步进电机、电梯运行和列车行驶方面。步进电机因其独特的优点被广泛地应用在自动化领域[3]。文献[4]针对传统七段S 曲线分段较多的问题,提出了一种新的加减速控制方法,将传统的S 曲线划分为5 个阶段,并通过仿真表明了新的控制方法可提高系统的柔性。步进电机在运行中容易受到柔性冲击,为了减小冲击程度,提高其运行稳定性,文献[5]针对两相混合式步进电动机,按照其机械、电气特性及正弦细分驱动原理,将电流细分驱动与正弦加速度S 曲线相结合。文献[6]针对步进电机开环控制系统,分别研究了加减速运行曲线和传动刚度对其运动情况的影响,目的是为了在开环情况下,优化步进电机的控制。
电梯调速控制主要是对电动机的调速控制[7-8],研究并合理选择电梯速度运行控制曲线,对提高电梯运行质量具有重要意义。文献[9]为了提高电梯的运行品质,提出了新型正弦电梯运行控制曲线,能够明显改善电梯的运行效果。文献[10]在电梯运行中综合考虑了乘客舒适度与候梯时间,而且能保证乘客舒适平稳的且在较短的时间内达到指定楼层,因此在设计电梯速度曲线时根据电梯的运行特点与性能采用了抛物线型的电梯速度曲线。列车可按照多种速度曲线运行达到自动驾驶的目的,但会导致在站间的牵引能耗不同,故许多研究者对其速度曲线优化问题较为关注[11-12]。在列车自动运行方面,文献[13]采用了遗传算法对列车自动运行速度曲线进行优化,提高了列车自动运行的安全性、舒适性。文献[14]采用了粒子群算法,对控制列车的速度运行曲线进行优化,提高了控制曲线的平滑性,避免列车多次加减速切换,降低了其能耗,提高了乘客的舒适度。不同的速度曲线有不同的特点,常用的3 种曲线有梯形、抛物线形和S 形。本文提出将3 种常用速度运行曲线应用在高压旧电缆回收常见场景中,搭建回收场景模型,研究合理控制策略,并开展了回收装置试验工作。
1 高压旧电缆回收装置
根据回收场景现场工况施工要求,回收装置的工作原理及高压旧电缆自动化回收控制理念,提出了高压旧电缆自动化回收装置的初步设计,并应用Solidworks 软件创建出装置的三维实体模型,如图1 所示。

图1 高压旧电缆自动化回收装置系统总体设计结构
高压旧电缆自动化回收装置系统主要由图1中5 个部分组成,分别为自动收/放线架、DCS-3电缆输送机、液压升降平台、桥架及总控柜。总控柜内置PLC(可编程逻辑控制器)伺服系统、触摸屏、电器元件、牵引力传感器模块及记米传感器模块,用于控制伺服永磁同步电机及收集牵引力等参数,随时监视每个部件运行状况,并显示于触摸屏上;总控柜设有紧急停止按钮,一旦现场出现紧急状况和故障情况,此条线可全部强制停止。
2 回收过程中电缆牵引力特性
在实际的电缆线路中,有简单的,也有复杂的路径。对于较复杂路径的电缆线路,其牵引力的计算通常是将整条路径分成几段分别计算,然后将各段路径的牵引力进行相加,即可得到整条电缆线路总的牵引力。表1 为各段牵引力计算公式。比较常见的敷设场景有水平直线场景、水平转弯和斜坡加直线场景,如图2 所示。电缆回收牵引力的计算过程与敷设牵引力的计算过程刚好相反,但是总的牵引力计算过程是一样的。
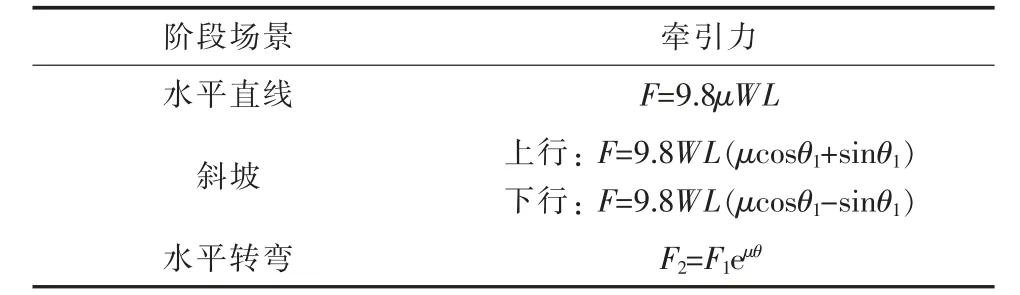
表1 各个阶段常见场景的牵引力表达式
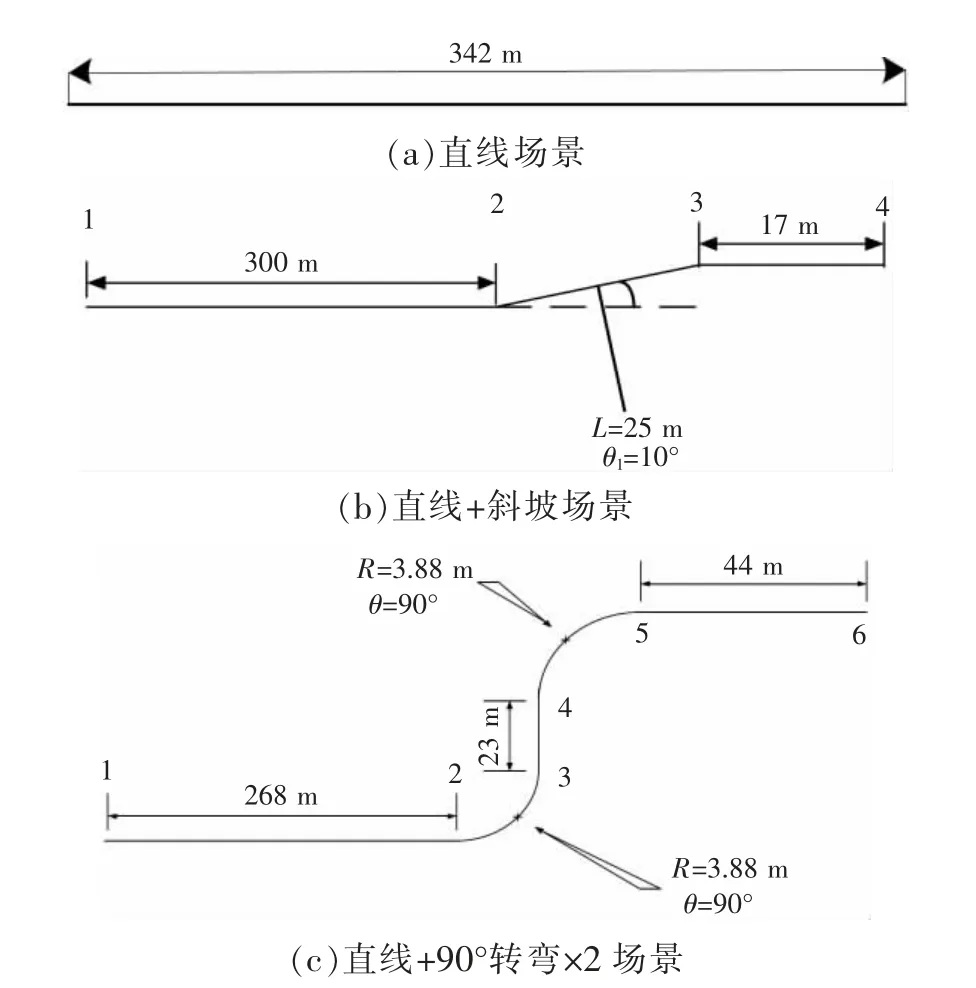
图2 场景示意
以典型直线加转弯场景为例做牵引力特性分析。回收距离为347.2 m,摩擦系数μ 为0.2,电缆单位W 为12.352 kg/m。牵引负荷特性曲线如图3 所示。

图3 水平弯曲场景牵引力变化曲线
从图3 可以看出,总的牵引力大小与水平距离的长度成正比的关系,由最大的电缆牵引力就可以确定敷设或者回收距离,敷设过程的牵引力和回收过程的牵引力刚好对称。回收过程中初始时刻牵引力最大,末始时刻最小;下坡回收牵引力小,上坡回收牵引力大。因此回收过程中起初过程中速度不一定要求恒速控制,按照一定的速度曲线运行对电缆的保护比较好。
3 自动化回收流程
根据高压旧电缆变速控制的要求,提出了高压旧电缆自动化回收流程,如图4 所示。

图4 高压旧电缆自动化回收控制流程
在整个回收高压旧电缆过程中,首先需要确定回收场景类型,常见的阶段回收场景有直线、斜坡、水平转弯,而简单和复杂的回收场景类型是阶段回收场景组合而成。其次,把每一段的回收场景特征数据输入到PLC 伺服系统中,回收场景特征数据包括阶段场景的长度、倾斜角、转弯半径、转弯圆心角等。然后PLC 伺服系统能够判定数据是否输入成功,若输入成功,则进行下一步,PLC 伺服系统可以根据不同的场景类型选择不同的速度运行控制曲线,最后按照速度曲线进行自动化回收电缆,直至结束。若输入不成功,则需要检查回收装置,排除故障后,再重新输入。
4 基于速度曲线的控制策略
4.1 伺服系统控制模型
高压旧电缆自动化回收是通过PLC 控制PMSM(伺服永磁同步电机)运行来实现的,控制策略如图5 所示。控制系统由内外环构成,外环是单纯的速度运行控制曲线指令,内环采用的是矢量控制,是PMSM 常用的控制方法[15]。在电机矢量控制中,电流控制方法主要有5 种,分别为:id=0 控制、最大转矩控制、弱磁控制、cosφ=1控制及最大效率控制等[16]。本文中高压旧电缆回收装置属于小容量调速系统,伺服永磁同步电机选用id=0 的矢量控制方法。

图5 基于伺服永磁同步电机的PLC 伺服系统控制策略
控制系统的内环是基于电流解耦控制的永磁同步电机伺服系统。整个系统的控制过程为:用设定的转速指令与电机当前的转速相比较,通过速度环的PI 控制器进行调节,得到q 轴电流iq的指令值iqref。与此同时设定d 轴电流iqref=0,对永磁同步电机三相绕组中的电流进行检测,三相电流再通过clark 和park 坐标变换,得到d 和q 轴上的电流id和iq,将其同给定的d 和q 轴电流相比较,通过各自的PI 控制器得到d 和q 轴上的电压和再结合解耦控制器的输出得到d和q 轴的电压指令udref和uqref。
运动方程为:

状态方程为:

式中:p 为微分算子;J 为伺服电机转子以及系统的转动惯量;TL为伺服电机的负载转矩;np为伺服电机的极对数。
4.2 常用速度运行控制曲线
4.2.1 梯形速度曲线数学模型
典型的梯形速度运行曲线如图6 所示,由3个过程组成,分别为匀加速、匀速、匀减速。加速度为常数,x 轴是时间t,y 轴是速度v 和对应的加速度a。
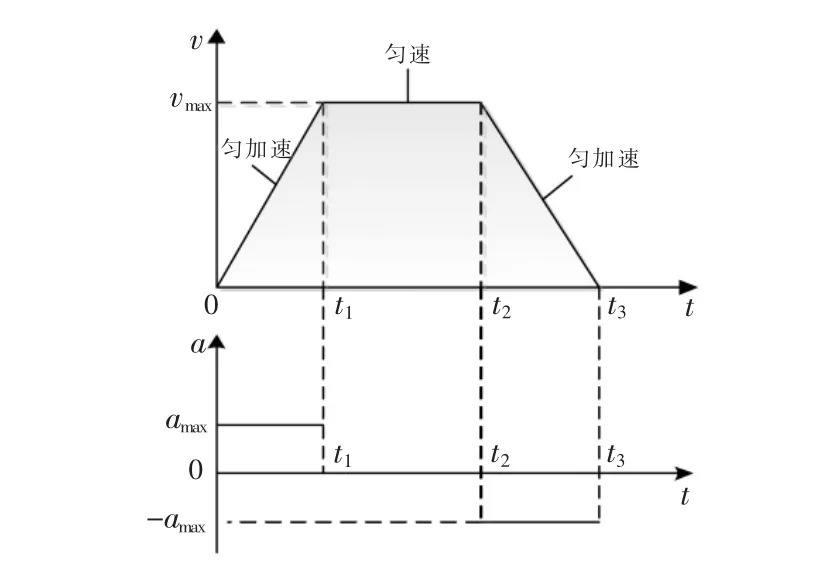
图6 梯形曲线
速度公式如下:

式中:v0为初速度;vmax为末速度;amax为加速度。
梯形速度运行曲线算法实现比较简单,但整体速度不够平滑,加速度在曲线分段衔接处不连续变化,存在阶跃,对电机进行控制时可能会给电机造成柔性冲击。
4.2.2 抛物线形速度曲线
抛物线运行速度曲线如图7 所示,由减加速、匀速、加减速3 个过程组成,加速度变化率为常数。

图7 抛物线形曲线
速度公式如下:
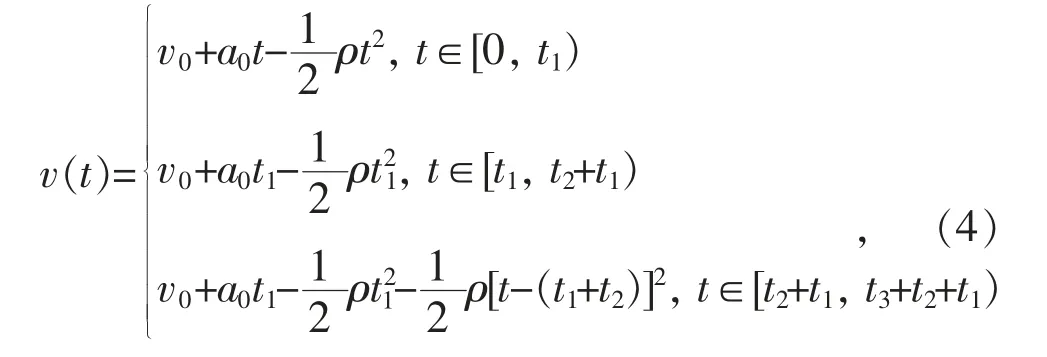
式中:v0为初速度;a0为初加速度;ρ 为加速度变化率。
抛物线形速度曲线整体相对平滑,对电机进行控制时可使电机加速快,但在曲线的起点和终点加速度较大,一定程度上可能对电机造成柔性冲击,对于升降速率要求较高的场景,此曲线较适合。
4.2.3 S 形速度曲线数学模型
S 形曲线如图8 所示,分别由加加速、减加速、匀速、加减速、减减速5 个过程组成。其速度及位移数学表达式为:

图8 S 形曲线
速度公式如下:

式中:ρ 为加速度变化率;v0为初速度。
S 形速度曲线相对比较平滑且运动精度高,在对电机进行加减速控制过程中,曲线上任何一点的加速度都是连续变化的,并不产生任何突变,可避免对电机造成柔性冲击,但由于曲线阶段较多,故实现过程较复杂。
5 回收场景仿真分析
5.1 场景等效
在MATLAB/Simulink 仿真软件平台中搭建了伺服永磁同步电机矢量控制模型,进行常见回收场景下的高压旧电缆回收模拟仿真,电机的参数如表2 所示。根据电缆盘和电机之间的转速比q 和装置传动的总效率η,再通过实际回收场景的牵引力F 可以计算出系统中电机的负载转矩T,其数学表达式为:
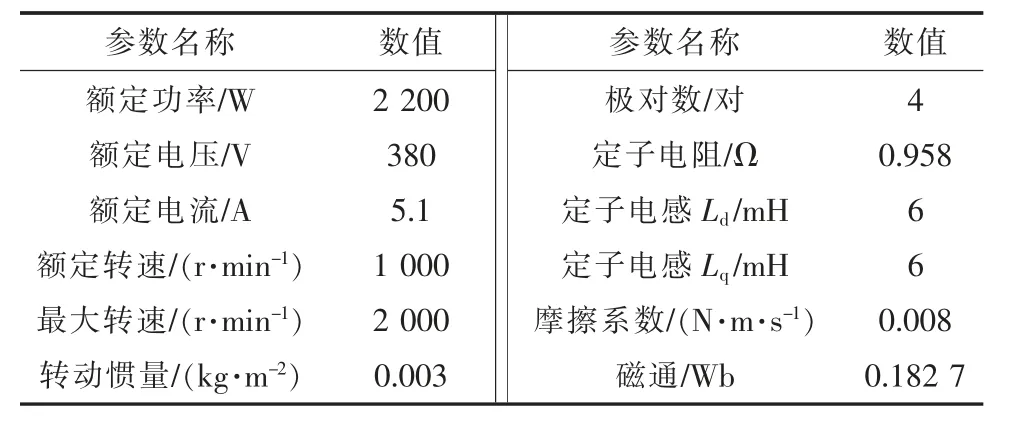
表2 伺服永磁同步电机主要参数

式中:n 为电机转速;R 为电缆盘半径;V 为电缆回收速度。
由式(6)可知,电机的负载转矩与牵引力成线性关系,与转速比成反比。由于实际回收场景总长度较长,电缆回收速度范围为0~9 m/min,导致实际回收场景仿真模拟时间在数10 min 之内,而在仿真软件平台中仿真时间以秒为单位,实际仿真过程中时间会更长,这并不合理,故必须采用等效试验的方法,将回收场景进行等效,模拟各种实际回收场景复杂的应力环境[17]。本文将实际回收场景进行了等效,把场景总长度缩小了1 000 倍,仿真时间相应地缩小了,但是为了使实际场景下的负载转矩与模拟环境中的保持一致,在转速比不变的情况下,则需要保持实际回收场景下的牵引力与模拟环境中的一样,故在模拟环境中计算牵引力时,时间需要乘以100 倍的系数。
5.2 场景仿真分析
本文设计了3 种转速运行控制曲线模型仿真对比分析,并假设场景正方向为从左到右。
5.2.1 直线场景
在直线场景下,从不同的方向牵引高压旧电缆,总的牵引力不会发生变化,所以可从正方向回收电缆或者从反方向牵引电缆。本场景总长度为342 m,按照给定的梯形转速运行曲线进行反方向回收高压旧电缆模拟仿真,仿真结果如图9所示。

图9 直线场景下梯形运行曲线控制电机仿真结果
由图9 仿真结果可知,电机在启动时转速出现负值,大约为25 r/min,相对较小,可能是仿真过程中系统迭代所产生的误差,不会对系统造成影响,并且在实际中不会出现电机反转的情况。电机启动后能够按照梯形转速运行曲线工作,在0~1 s 电机匀加速,加速度为960 r/min2,1 s 时到达最大额定转速,在1~2.42 s 电机以最大额定转速匀速运行,2.42 s 时电机开始减速,在2.42~3.42 s 电机匀减速运行,加速度为960 r/min2,最后停下。电机电磁转矩在速度分段衔接处产生了突变,可能会给电机带来柔性冲击。然而电机在启动和停止时相对于电机恒速运行时更加稳定。
5.2.2 直线+斜坡×1 场景
按照给定的抛物线形转速运行曲线进行反方向回收高压旧电缆模拟仿真,仿真结果如图10所示。

图10 直线+斜坡场景下抛物线曲线控制系统仿真结果
由图10 仿真结果可知,电机启动之后能按照抛物线形转速运行曲线进行工作,在0~1 s 内电机减加速运行,初速度为0,初加速度值1 440 r/min2,加速度变化率为960 r/min3,1 s 时电机转速超过了最大额定转速,然后慢慢到达最大额定转速,随后以最大额定转速匀速运行,2.42 s 时电机开始加减速运行,3.42 s 时停止运行。相对于梯形转速运行曲线,电机在抛物线形转速运行曲线下的电机电磁转矩在速度分段衔接处更加平稳一点,不会产生较大突变,但是也可能会给电机带来柔性冲击。
5.2.3 直线+90°转弯×2 场景
按照给定的3 种转速运行控制曲线进行正方向回收高压旧电缆模拟仿真,为了增加其对比性,把加速、减速及匀速运行时间设为相同,仿真过程时间如表3 所示,仿真对比结果如图11所示。
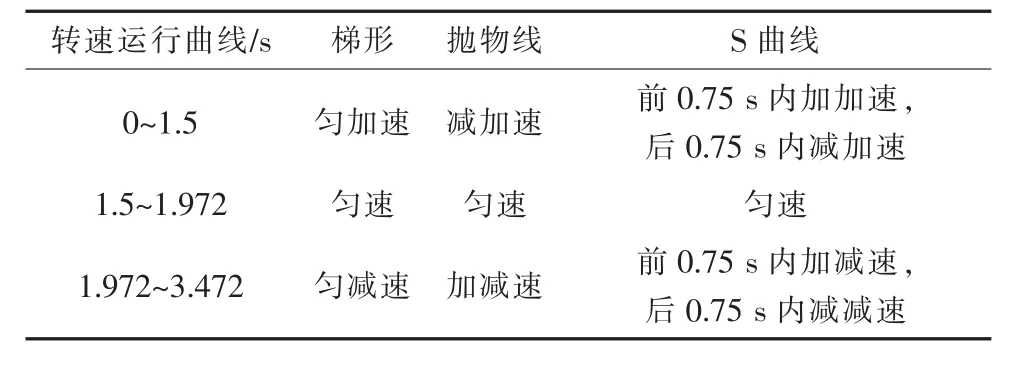
表3 3 种转速运行控制曲线控制电机加减速过程时间
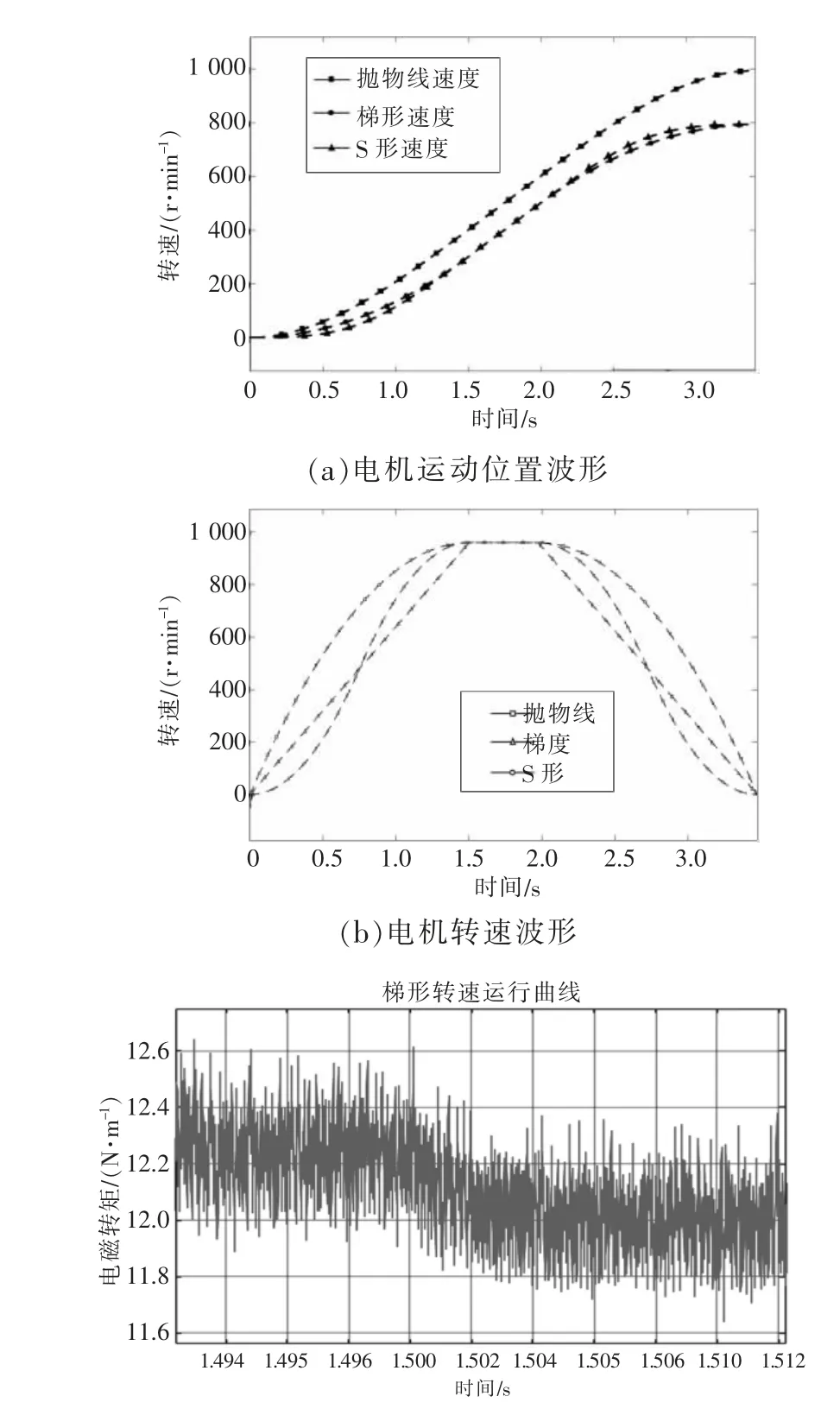

图11 直线+转弯场景下3 种运行控制曲线对比仿真结果
由图11 的仿真结果可知,对比3 种运行控制曲线升降速策略下的电机运动位置输出曲线,抛物线形速度运行控制曲线具有加速与减速快的特点,输出转角最大,而S 曲线和梯形曲线下电机运动位置相当,加减速效率一般高。在1.5 s 时都开始做匀速运行,是一个转速变化的衔接点,3.472 s 时停止运行。在梯形运行曲线仿真结果中,在转速变化衔接处,电机电磁转矩、定子绕组三相电流都会发生小突变,可能会给电机带来柔性冲击;抛物线形运行曲线与S 形运行曲线相比,S 形转速运行曲线下电机电磁转矩在直线场景部分有S 形运动的趋势,说明电机能输出平稳的电磁转矩,而且定子绕组三相电流密度在电机启动及停止时比在抛物线形转速运行曲线下稀疏,说明在启动和停止过程中比较稳定,故可以选择S 形运行曲线来自动回收高压旧电缆。
6 装置试验
依据设计要求对高压旧电缆回收装置系统进行试验现场组装,如图12 所示,模拟直线加斜坡再加转弯场景(如图13 所示)开展装置测试。在试验过程中采用直径大小为3 m、电压等级为110 kV 的电缆盘;回收旧电缆的总长度为35 m,电压等级为380 V。

图12 回收装置系统现场组装场景

图13 斜坡+直线+水平转弯场景
为了保证试验过程的安全性,在试验安全范围内分别测得电机启动时,电缆的回收速度为9 m/min,6 m/min,3 m/min 牵引力变化波形,并记录好相应数据。试验是在直线+斜坡+转弯场景下进行的,给定电机合适的转速让电缆盘转动,同时旧电缆被拉紧回收,等待几秒稳定后,立即纪录此时的牵引力大小、示波器输出牵引力变化波形及变频器输出电流波形,然后使电机反转,同时旧电缆逐渐被释放,记录牵引力变化波形。
(1)电机转速为529.4 r/min,电缆回收速度为9 m/min 时,牵引力变化波形见图14。
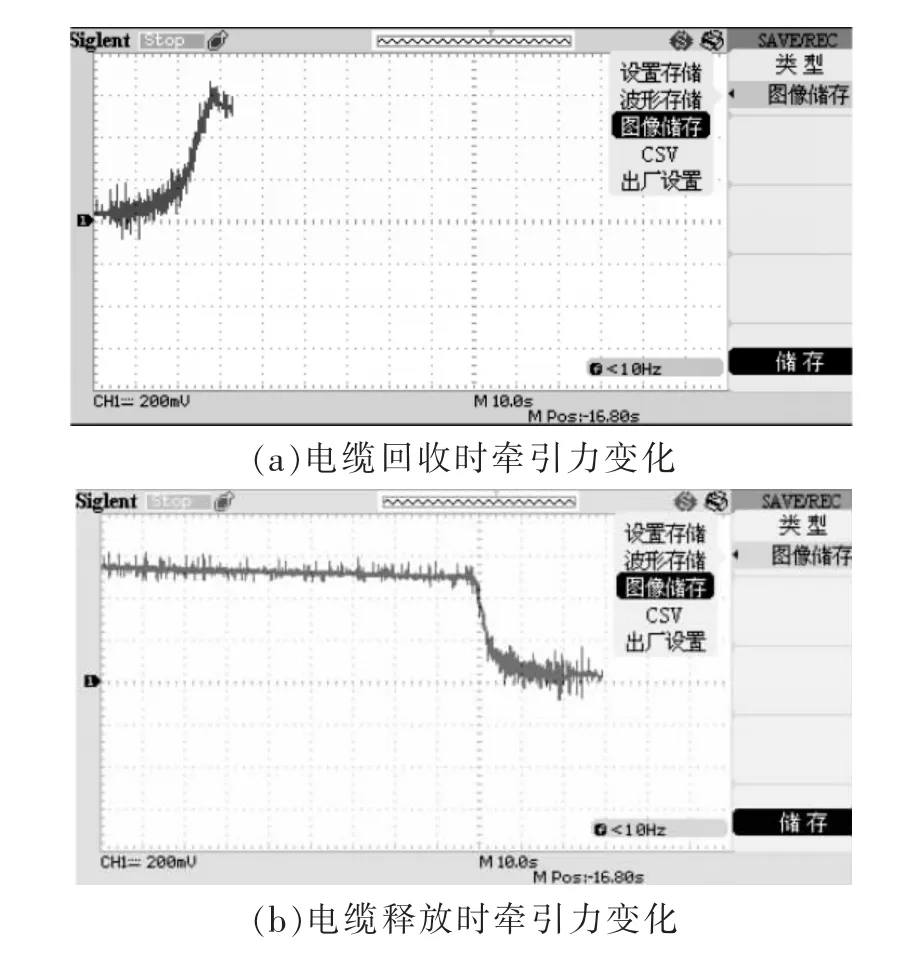
图14 电缆回收速度为9 m/min 时牵引力变化波形
(2)电缆回收速度为6 m/min,电机转速为352.9 r/min 时,牵引力变化波形见图15。
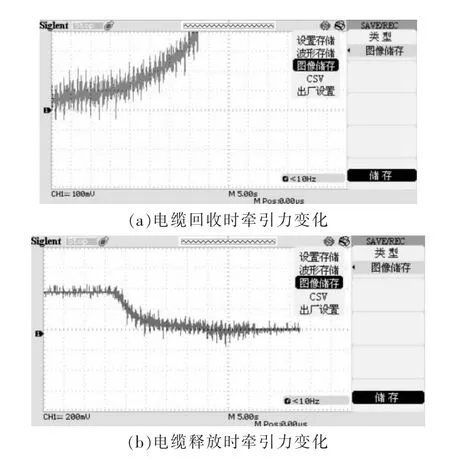
图15 电缆回收速度为6 m/min 时牵引力变化波形
(3)电缆回收速度为3 m/min,电机转速为176.5 r/min 时,牵引力变化波形见图16。
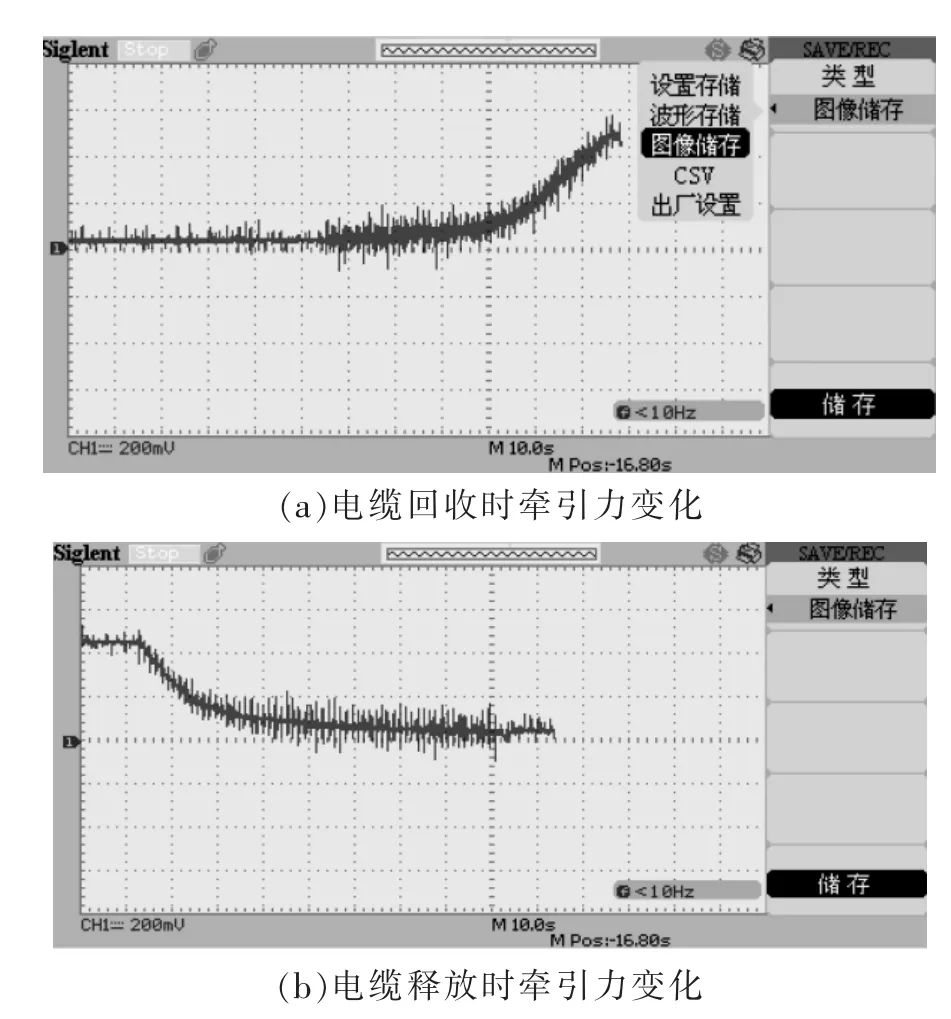
图16 电缆回收速度为3 m/min 时牵引力变化波形
由图14—16 可知,不同的电缆回收速度,牵引力的变化幅度不同,电缆回收速度越大,牵引力的变化幅度也越大,达到牵引力峰值的时间越短,此过程中牵引力的峰值在210~230 N,同时表明了在实际的高压旧电缆回收过程中,选择合适的回收速度至关重要。当电缆在进行释放时,此时的牵引力从最大值处迅速减小,当完全释放后,牵引力回到最低值。
7 结语
回收过程中牵引力的特性是从大到小,对电缆回收装置的速度控制提出要求。本文提出了一种用速度运行控制曲线控制伺服永磁同步电机的方法。模拟多种场景分析控制策略有效性。仿真结果表明在启停过程中电机按照转速曲线运行时相对于电机恒速运行时更加稳定;梯形、抛物线形转速运行控制曲线可能会给电机带来柔性冲击,适用于简单的高压旧电缆回收场景;S 形转速运行控制曲线相对平滑,不会给电机带来柔性冲击,也不容易造成电机故障,适用于复杂的高压旧电缆回收场景。通过回收装置的现场型式试验测试,验证了控制策略可以有效地抑制电缆启动时牵引力的突变,避免安全事故的发生,为电缆回收的安全施工奠定了基础。
