指向核心素养的初中物理深度备课
2021-07-14付明马剑
付明 马剑
摘 要:物理核心素养的提出,指明了物理教学方向,对教师也提出了更高的要求.核心素养如何在教学中实现真正的落地?本文以人教版“杠杆”一课为例,从物理核心素养的四个维度出发,抓住物理概念本质,从学生认知规律的角度设计教学,有效提升学生的物理核心素养.
关键词:核心素养;深度备课;杠杆
中图分类号:G633.7 文献标识码:B 文章编号:1008-4134(2021)12-0024-04
物理学科核心素养主要由物理观念、科学思维、科学探究、科学态度与责任四个方面的要素构成.在四个要素中,物理观念代表知识的内化,是其他核心素养的基础,科学思维和科学探究是关键能力,科学态度和责任是必备品格.四个方面相互依赖、共同发展.教师应基于教学实际,循序渐进地培养学生的核心素养.
人教版义务教育教科书将“杠杆”安排在八年级下册第十二章“简单机械”,本节内容由“杠杆”“杠杆的平衡条件”“生活中的杠杆”三部分构成.杠杆的知识是前几章力学知识的延续,比如力的三要素、平衡状态,也是学习滑轮和轮轴等简单机械的基础.而“探究杠杆的平衡条件”是《义务教育物理课程标准(2011年版)》列出的20个学生必做实验之一.因此,在本节课中培养和发展学生的核心素养显得尤为重要.
1 物理观念——杠杆的概念、力臂的概念
物理观念是学生从物理学视角形成的对客观世界的基本认识,是解决实际问题的基础.就本节课而言,如何让学生科学认识杠杆、如何引导学生自主构建力臂概念,是教师在备课时需要深入思考的.
1.1 杠杆的概念
教材中给出的杠杆的概念是:“一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆” .杠杆概念的关键词是:硬棒、力的作用、固定点、转动.很显然,杠杆是一种物理模型,在力的作用下能够绕固定点转动的硬棒,无论是直的还是弯曲的,都属于杠杆.因此,在教学中,教师需要让学生实际体验杠杆,再结合生活中的杠杆,找到共同点,从而形成杠杆的概念.
1.1.1 引入新课:大国重器——五大机械
播放视频五大机械:火箭航空运输机械、矿山采挖机、悬空铺桥造桥机、风力发电机安装设备、挖隧道盾构机.震撼的场面,引发学生民族自豪感,激发学习机械的兴趣.
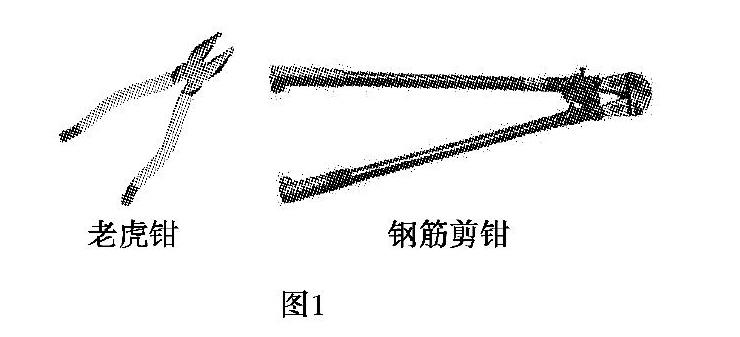
1.1.2 实际体验,感受杠杆可以省力
先后让力气大的男生用老虎钳、力气小的女生用钢筋剪钳尝试将粗铁丝剪断(如图1所示).学生发现男生无法剪断铁丝,而女生却很轻松地剪断了铁丝.通过明显的反差对比让学生认识到杠杆可以省力.
1.1.3 分组体验,观察杠杆特点
每组用铅笔、直尺、硬币等器材,模拟小时候玩跷跷板的过程(如图2所示),并观察跷跷板转动过程中的特点.最后,学生根据老虎钳、钢筋剪钳、跷跷板等的使用体验,总结杠杆的共同特点,进而得出杠杆的概念及支点、动力、阻力三个要素.
1.2 引发学生深度思考,恰当建立力臂概念
力臂这一概念对于初中学生来说是个难点,也是物理教学的一个难点.而大多现行的初中物理教材都是直接将杠杆的五要素列出,即直接给出力臂的概念,学生只能被动接受,并不理解概念的本质,也不知道为什么引入力臂的概念,这样的教学安排不符合学生的认知规律.
引入力臂概念是为了方便探究杠杆的平衡条件,教师需要创造情境,引导学生建立力臂概念.抓住概念本质.为此,不少物理教师的做法是:先给出支点、动力、阻力的概念,然后让学生初步探究杠杆的平衡条件.没有力臂概念之前,学生会用“支点到动力的作用点(记为距离1)”“支点到阻力的作用点(记为距离2)”表示.在学生发现杠杆的平衡条件为“动力×距离1=阻力×距离2”后,教师再用弯曲杠杆演示,使学生发生认知冲突,从而适时建立力臂概念.这样的处理符合学生的认知规律,而且能很好地形成力臂的物理观念.但是受课时限制,我们可能没有充足的时间去探究.为此,笔者采取了以下方案.
1.2.1 是什么影响了跷跷板的转动效果
教师要求学生用图3的装置模拟跷跷板,使跷跷板在水平位置静止,并总结影响跷跷板转动效果的因素.通过实验,学生发现:保持1元硬币位置不变将5角硬幣向右移动、保持5角硬币位置不变将1元硬币向右移动,都可实现跷跷板在水平位置静止.所以,力的大小、力的作用点到支点的距离都会影响杠杆的转动效果.
1.2.2 力的方向也会影响杠杆的转动效果
力的三要素有大小、方向、作用点.当学生意识到力的大小、力的作用点到支点的距离影响杠杆的转动效果后,教师提出问题并演示:当力的方向改变时,杠杆的转动效果是否改变?
图4是自制力臂演示器,转盘上标有刻度,细线悬挂的钩码相当于动力和阻力,定滑轮可以改变力的方向.由图4可知,当力的大小、力的作用点到支点的距离相同而力的方向改变时,杠杆的转动效果也不同.
1.2.3 抓住本质,建立力臂概念
当力的方向、力的作用点到支点的距离都改变时,杠杆的转动效果是否改变?继续用力臂演示器演示,如图5所示,杠杆的转动效果没有改变.因此,应该有一个更全面的因素影响杠杆的转动效果,是什么呢?教师继续用力臂演示器演示,转动转盘,使细线与刻度盘的刻度重合,如图6所示.
由实验可知,两次实验杠杆的转动效果相同的根本原因是:支点到力的作用线的距离相同,由此引入力臂概念.
2 科学探究——探究杠杆的平衡条件
学生已经知道物体的平衡状态包括静止状态和匀速直线运动状态.在此基础上,教师告诉学生,杠杆在动力和阻力作用下静止或匀速转动时,即杠杆平衡.同时,教师要给出如图7所示杠杆,学生需要明白两种情况都是平衡状态,而本节课针对杠杆在水平位置平衡时进行探究.
2.1 认真对待学生提出的合理猜想
在体验模拟跷跷板之后,学生已经知道影响杠杆平衡(即上面提到的杠杆的转动效果)的因素有动力、阻力、动力臂、阻力臂,并且发现:力大力臂短,力小力臂长的规律.当教师提出问题“杠杆平衡时动力、阻力、动力臂、阻力臂之间满足什么定量关系”后,学生能够排除“力与力臂相减”或“力与力臂相除”的关系,因为相减或相除肯定不会相等,所以学生的猜想是“力与力臂相加”或“力与力臂相乘”的关系.
2.2 关于实验方案
笔者查阅了不同版本的初中物理教材,发现不同教材的實验方案是不同的(如图8所示).人教版和沪科粤教版的教材一致,即用钩码对杠杆施的力作为动力和阻力;北师大版教材用到了钩码和弹簧测力计,且弹簧测力计的施力方向是竖直向上;苏科版教材也用到了钩码和弹簧测力计,但弹簧测力计的施力方向是竖直向下.应该说,使用弹簧测力计能使规律更具普遍性,但要考虑课时的限制,苏科版的插图中由于弹簧测力计是倒着使用,需要倒着调零,而倒着调零最方便的方法如图9所示:将弹簧测力计甲竖直正方向调零,再将弹簧测力计乙与弹簧测力计甲钩对钩相连,让两个弹簧测力计示数一致.所以,笔者认为,让学生用钩码进行3次测量,再用弹簧测力计竖直向上测1次较为合理.
2.3 数据分析与处理
学生得出数据后如何处理数据进而引导学生得出结论?有的老师引导学生直接得出结论,有的老师引导学生得出力与力臂反比例关系.笔者认为,大部分初中物理教材把杠杆安排在八年级下学期,学生没有学反比例函数,不适合从反比例角度分析定量关系;苏科版教材把杠杆放在九年级,此时学生已经学了反比例函数,可以从力与力臂成反比角度分析.
3 科学思维——为什么要在杠杆水平平衡时进行实验
3.1 杠杆的种类及自身重力对实验的影响
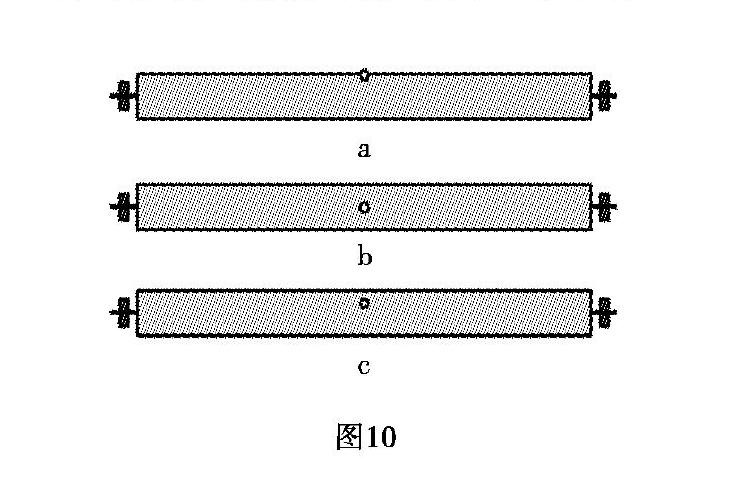
实验室用来做“探究杠杆平衡条件”实验的杠杆,按照支点的位置不同,可分为三类(如图10所示).无论哪种类型的杠杆,由于杠杆转轴的孔径非常小,所以转轴处摩擦力的力矩也非常小,可以忽略不计.
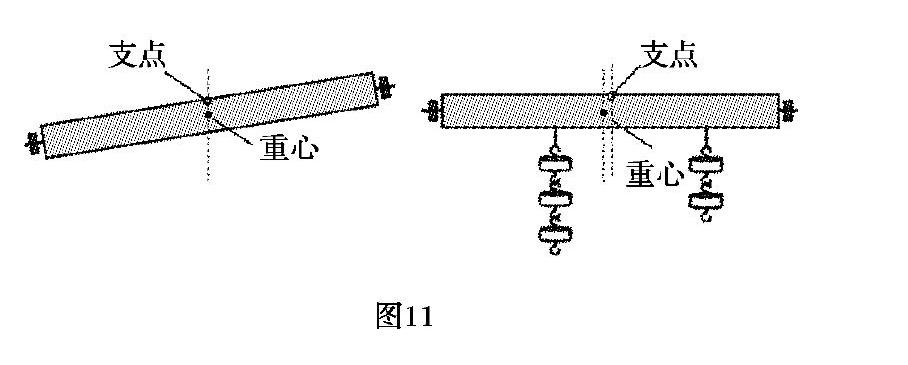
图10a的杠杆,支点在杠杆的上边缘中点.这种杠杆调节水平平衡比较容易,但由于支点与重心之间间距较大,在实验前如果杠杆不是严格水平,此时重心必然在支点正下方,重力力臂为零,当杠杆悬挂钩码在水平位置平衡时,杠杆自重的力矩影响比较大(如图11所示),实验误差也就比较大.
图10b的杠杆,支点在几何中心,调节平衡螺母,可使杠杆重心与支点重合.当杠杆重心与支点重合时,杠杆重力的力臂为零,杠杆可以在任何位置平衡,不容易在水平位置调节平衡;如果杠杆重心与支点不重合(由于平衡螺母的位置影响,平衡螺母和杠杆构成的杠杆重心可能不重合),则杠杆在自身重力作用下必然会逆时针转动,最终变为竖直状态(如图12所示).因此,无论杠杆重心与支点是否重合,都很难调节杠杆在水平位置平衡,不易操作.
因此,实验室用的杠杆主要是图10c的杠杆,支点在几何中心之上、上边缘之下.这种杠杆调节水平平衡容易,且由于支点到重心的距离小,杠杆重力的力臂也很小,在杠杆没有严格水平平衡时,对实验的影响也就小.
3.2 杠杆在水平位置平衡的原因
我们对图10c的杠杆进行分析.如果实验前杠杆没有在水平位置平衡,如图13a所示,杠杆重心在支点正下方,杠杆重力力臂为零;如果挂上钩码后使杠杆在水平位置平衡,如图13b所示,此时杠杆重心在支点左下方,杠杆重力力臂不为零,对实验有一定的影响.如果实验前杠杆没有在水平位置平衡,为了消除杠杆自身重力影响,需要使杠杆挂上钩码后倾斜角度与实验前相同,如图13c所示,但是测量力臂非常不方便.
综上分析,实验前调节杠杆水平平衡是为了消除杠杆自身重力的影响;实验中调节杠杆水平平衡是为了方便测量力臂.但是,我们必须清楚,实验前和实验过程中的调节平衡不是独立的,而应该是一致的.如果不一致,要么杠杆自身重力有影响,要么测量力臂不方便.
4 科学态度与责任——真的可以撬动地球吗
“给我一个支点,我可以撬动地球.”这是人们熟悉的阿基米德的名言.根据杠杆平衡条件,动力臂需要多长才能撬动地球?如图14所示,教师把数据给学生:以月球为支点,地球质量m地约为6×1024kg,月地平均距离L2约为38.44万公里,为了计算方便,近似取值4×108m,一个成年人体重m人=70kg,求动力臂L1(即人到月球的距离).
由杠杆平衡条件:m人g·L1= m地g·L2;
则动力臂L1=m地L2m人=6×1024kg×4×108m70kg=3.43×1031m.
再将动力臂的长度变换成光年,1光年≈9.5×1015m,则动力臂L1≈3.61×1015 光年,即3610万亿光年.目前的研究认为宇宙的范围为930亿光年,撬动地球的杠杆长度远远超过了宇宙的大小,因此,撬动地球只是一个理想.
5 结束语
基于核心素养的物理教学没有固定的教学模式.核心素养的落地首先需要物理教师更新理念,以核心素养的四个方面为指导,加强深度备课,重视学生物理观念的形成,在每一节课中注重学生科学思维的提升,通过物理和生活的联系培养学生的科学态度和责任,从而发展学生的核心素养.
参考文献:
[1]胡卫平.物理学科核心素养的内涵与表现[J].中学物理教学参考,2017,46(15):1-3.
[2]朱文军.基于物理核心素养的浮力深度备课[J].物理教师,2018,39(02):47-50.
[3]田成良,孔令坤,赵瑞雪.剖析力臂概念教学的逻辑[J].中学物理,2019,37(12):5-6.
[4]蒋新.杠杆要在水平位置平衡的原因[J].物理教学,2015,37(04):39-40.
[5]王伟民.也说杠杆要在水平位置平衡的原因[J].中小学实验与装备,2018,28(01):27-29.
[6]沈孝兵.做好实验,探究杠杆——“杠杆”教学过程中的实验设计及教学启示[J].物理教学,2017,39(07):42-45.
[7]陈伊淳,陈刚.试论“力臂概念”教学改进的有效性——基于信息加工心理学视角[J].中学物理,2021,39(04):8-11.
[8]蔡田怡.基于“5E”探究模式的生活化教学——以初中物理“杠杆”教学为例[J].物理教师,2020,41(12):48-51.
[9]王伟彬,张玲,孙建纹.突出自主学习 构建“学问课堂”——以“杠杆”教学为例[J].中学教学参考,2020(29):38-40.
[10]邹玉.核心素养下物理概念教学的实验设计——关于“杠杆力臂教学”的思考与设计[J].中学物理教学参考,2020,49(13):24-27.
[11]孙永权.一堂体现核心素养的科学课——以《杠杆》一课的教学为例[J].中学教学参考,2019(14):92-93.
(收稿日期:2020-12-30)
