基于变论域模糊PID控制动力总成主动悬置分析
2021-07-14陈哲明马万力白恒星常远旭李伟健
陈哲明,马万力,白恒星,常远旭,张 鑫,李伟健
(重庆理工大学 a.车辆工程学院;b.汽车零部件先进制造技术教育部重点实验室,重庆 400054)
近年来,传统的动力总成悬置系统由于存在着刚度和阻尼不能随汽车工况改变而同时改变的问题,越来越不能满足现代人对汽车舒适性的要求[1]。随着科学技术的不断发展,从半主动悬置到主动悬置,在悬置的控制领域中PID控制和模糊控制得到了广泛的应用和发展[2-3]。孙国春[4]运用自适应控制和反馈控制对汽车动力总成隔振系统进行研究;丁世稳[5]将模糊控制和PID控制结合对动力总成隔振系统进行优化控制,表明模糊控制的效果较好;蔺玉辉[6]利用联合仿真对隔振系统进行控制效果对比,研究结果表明控制系统需要一定的稳定性才能达到控制效果最优。
动力总成悬置系统是一种具有非线性、时变性等复杂特性的系统[7],无法对其建立精确的数学模型。为进一步提高汽车的平顺性和舒适性,在被动悬置中引入主动控制力来消除不同车速下汽车传递振动和噪声问题。其中,PID控制器原理简明,结构简单,参数设置方式容易实现对多数一般目标的控制,且具有良好的控制效果和鲁棒性。但在非线性系统中,其控制效果会随着系统的复杂程度而降低;模糊PID控制器受设计模糊规则的影响,具有一定程度的抗外界干扰性能,由于模糊规则在线调整PID参数的输出,使得模糊控制系统有着较快的响应速度,但是其控制精度会降低,输入输出的范围受模糊论域的影响;变论域自适应模糊控制方法在模糊PID控制的基础上,通过系统相应的输入或输出的误差及其变化率动态调整模糊论域,增加处理过程中的插值节点数,提高系统的控制效果[8-11]。本文中基于变论域自适应模糊控制的优点设计主动悬置系统的变论域模糊控制器,并考虑发动机和路面同时对悬置系统的激励,对主动控制悬置系统进行建模、仿真和结果对比分析。
1 系统动力学建模
1.1 主动悬置模型
主动悬置在面对汽车行驶的各种工况时,通过发动机和车身上作动器输出的主动控制力来代替传统的被动悬置阻尼元件[12],实现对悬置系统的控制程度。通过典型主动悬置,建立3自由度1/4车动力总成的数学模型,将发动机视为具有质量的刚体;作动器的体积和质量均较小,忽略其质量,建立的模型如图1所示。
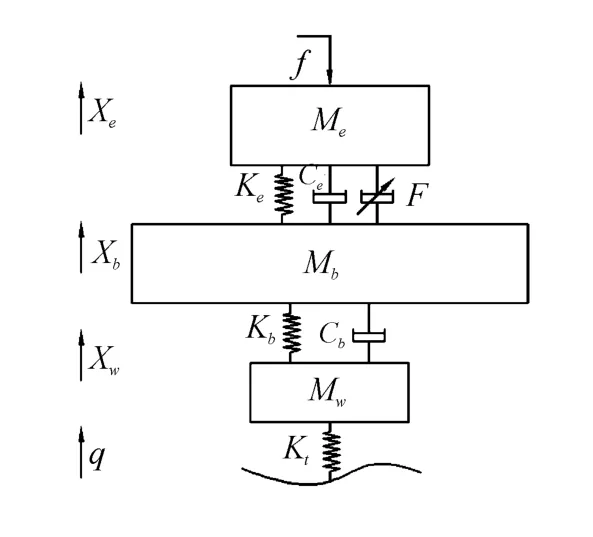
图1 3自由度主动悬置模型示意图
图1中的数学模型所代表的主要参数如表1所示。

表1 主动悬置主要参数
由图1可以列出主动悬置的运动微分方程为:
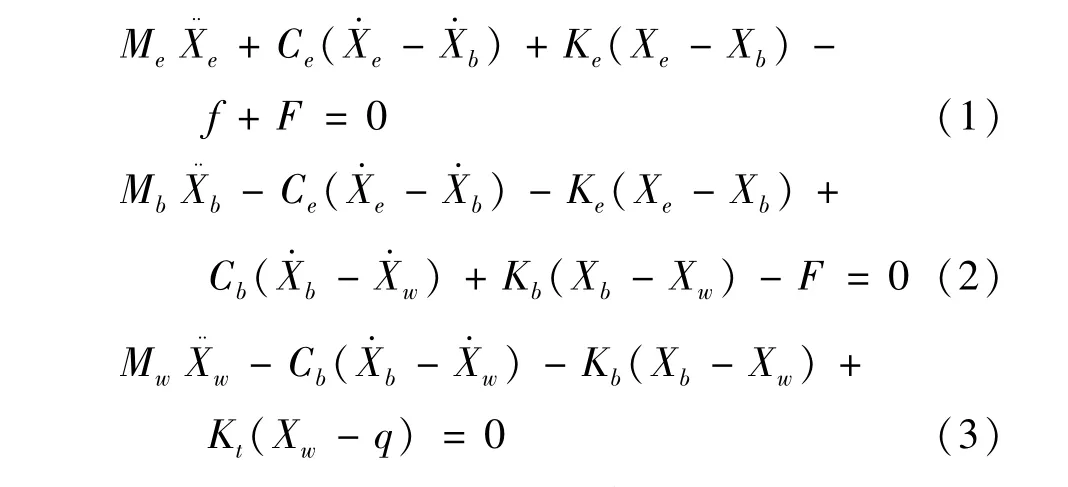
其中,运动微分方程中的具体数值和单位如表2所示。
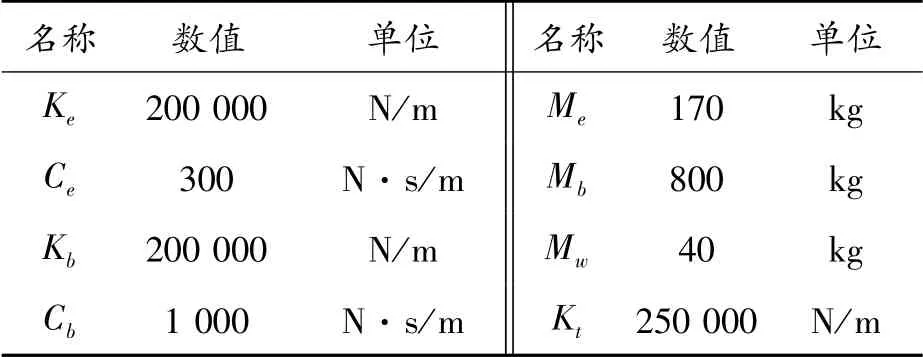
表2 主动悬置数值
根据式(1)~(3)和表1中的符号在Matlab/Simulink中建立对应的模型,将该模型悬置的垂直速度和垂直加速度作为输出,建立的模型如图2所示。
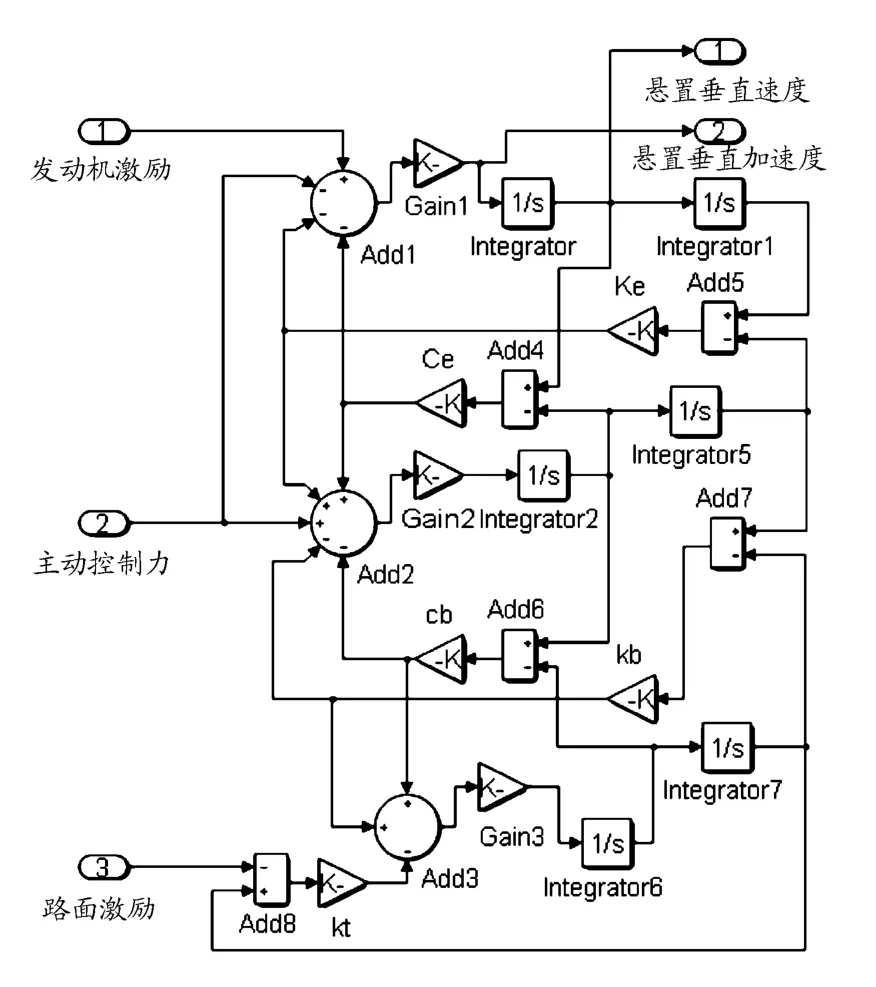
图2 动力总成主动悬置模型示意图
1.2 发动机激励模型
取四缸发动机常用工况下垂直方向力作为激励输入。由于偶数缸发动机各缸的1阶力可以相互平衡并抵消[13],故主要考虑发动机2阶惯性力对悬置系统带来的影响,其数学表达式为:

其中:m代表活塞的质量为0.302 8 kg;r代表曲柄回转半径为0.045 mm;λ代表曲柄半径和连杆长度的比值为1.3;ω代表发动机曲轴角速度为2 000 r/min。根据式(4)建立的发动机模型如图3所示。
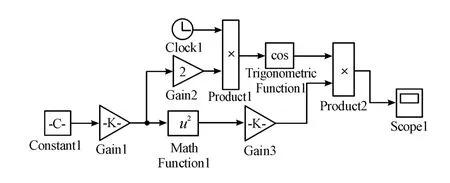
图3 发动机激励模型示意图
1.3 路面激励模型
由于汽车在不同路面行驶时,所受到的路面激励是不一样的,采用经典的滤波白噪声法来模拟路面不平度,其数学公式如下:

其中:q(t)代表输入的路面随机激励;Gq(n0)代表路面不平度系数的几何值,取路况相对较差的E级为0.004 096 m3;n0代表参考空间频率为0.1 m-1;u代表速度为60 km/h;f0代表下截止频率为0.062 Hz;w(t)代表随机白噪声。根据式(5)建立的路面模型如图4所示。

图4 路面不平度模型示意图
2 变论域自适应模糊PID控制
2.1 变论域设计
自适应模糊PID控制根据专家经验设定,一经设定其控制规则便无法更改,从而导致输入输出的论域也无法更改。一旦输入量过大,会导致系统超调,无法完成控制目标;而一旦输入量过小,又无法有效利用模糊规则,系统的控制精度将变差[14]。针对控制过程中出现的上述情况,结合变论域的思想设计了将伸缩因子包含在内的论域范围:

其中:α(i)、β(i)代表系统输入、输出伸缩因子;E、U代表系统的输入、输出论域;X(i)、Y(η)为变化后的输入、输出论域。结合式(6)设计的变论域自适应模糊PID控制结构如图5所示。

图5 变论域自适应模糊PID控制结构示意图
当e和ec作为控制系统的输入时,进入到变论域控制器中,将输入输出的伸缩因子与进入模糊PID控制器的的输入输出进行相乘。通过控制结构的设计,在进行论域因子选取时,e和ec的论域伸缩因子取α(1)、α(2);同时,α(1)、α(2)的基本论域为[0 1],β的基本论域为[0 1]。
2.2 变论域自适应模糊PID控制设计
对于传统的PID控制来说,通过比例Kp、积分Ki、微分Kd模块对参数进行调节具有极大的不确定性,在纠正输入偏差e及其变化率ec的过程中会消耗过多的时间。自适应模糊PID控制在传统的PID控制上进行了输入输出的参数模糊处理,利用模糊规则对输入的偏差及其变化率实时调整输出的Kp、Ki、Kd参数[15]。输入系统的e值过大时,需要Kp取较大数值,Ki取较小数值;e为中等数值时,需要Kp取较小数值,Ki取中等数值;e为较小数值时,Kp、Ki需要取较大数值,Kd取中等数值。整个模糊控制器的模糊逻辑规则需要结合相关专家经验进行的语言模糊化描述,其中Kp、Ki、Kd的模糊规则如表3所示。
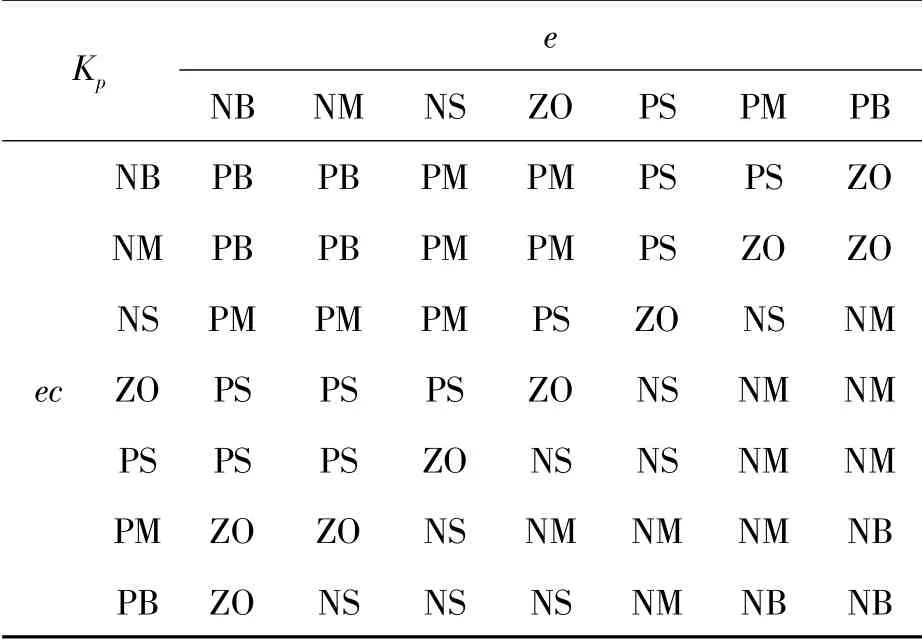
表3 Kp模糊控制规则
结合实际情况,选择动力总成垂直速度及其变化率作为输入。将选取的误差e、误差变化率ec、输入变量伸缩因子α(i)、输出变量伸缩因子β(i)同时分为7个等级,分别用字母NB、NM、NS、ZO、PB、PM、PS来表示系统输入输出的负大、负中、负小、零、正小、正中、正大情况。设定[-6 6]为e、ec、α(i)、β(i)的离散论域。根据被动悬置的仿真结果,确定输入输出的量化因子Ke=30、Kec=0.6、Ku=30。
2.3 系统模型设计
根据表3~5,在Matlab/Simulink中建立49条模糊控规则,再根据变论域控制规则,建立基于变论域自适应模糊PID主动悬置控制模型,建立的模型如图6所示。
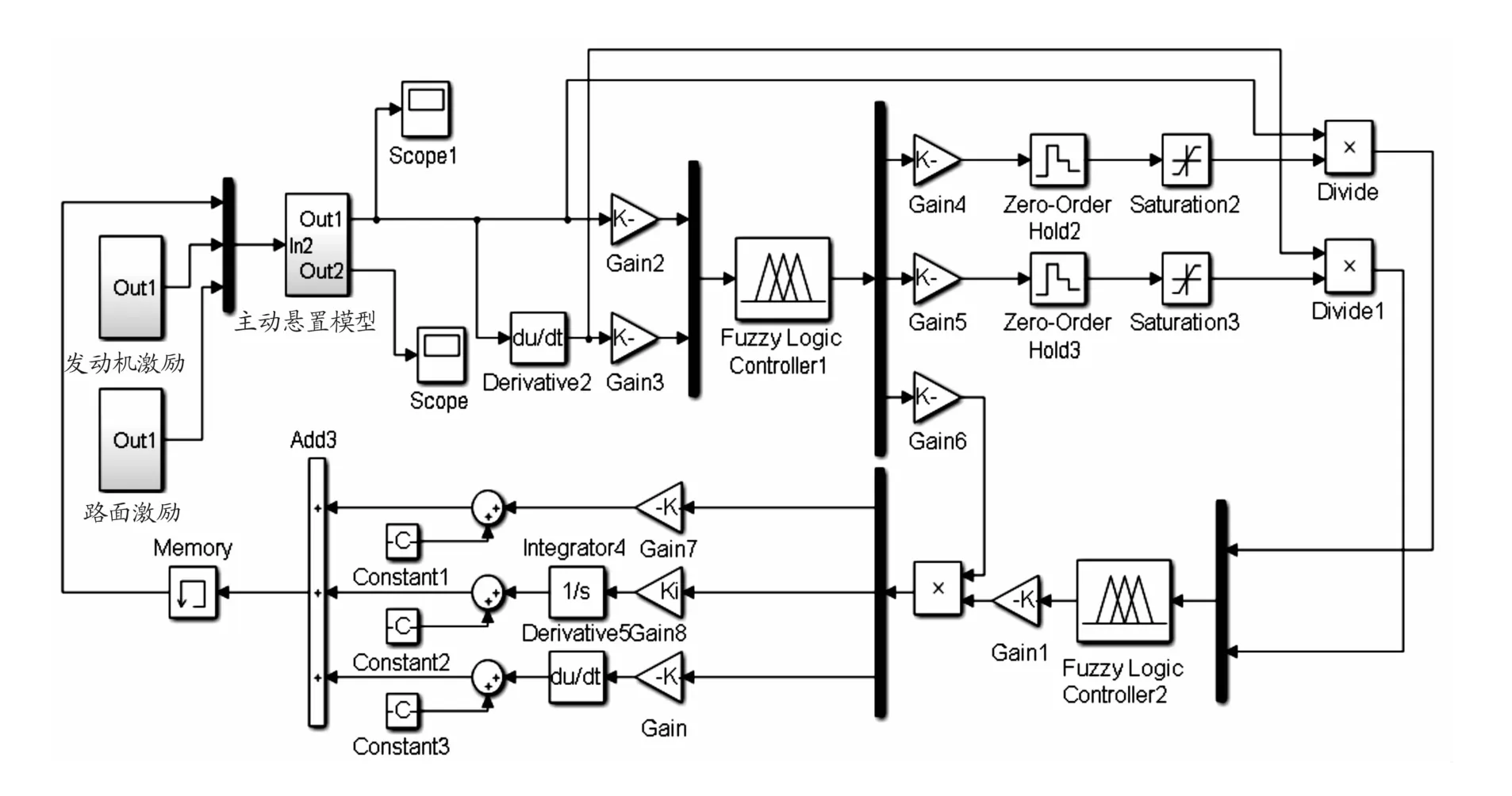
图6 变论域自适应模糊PID系统模型示意图
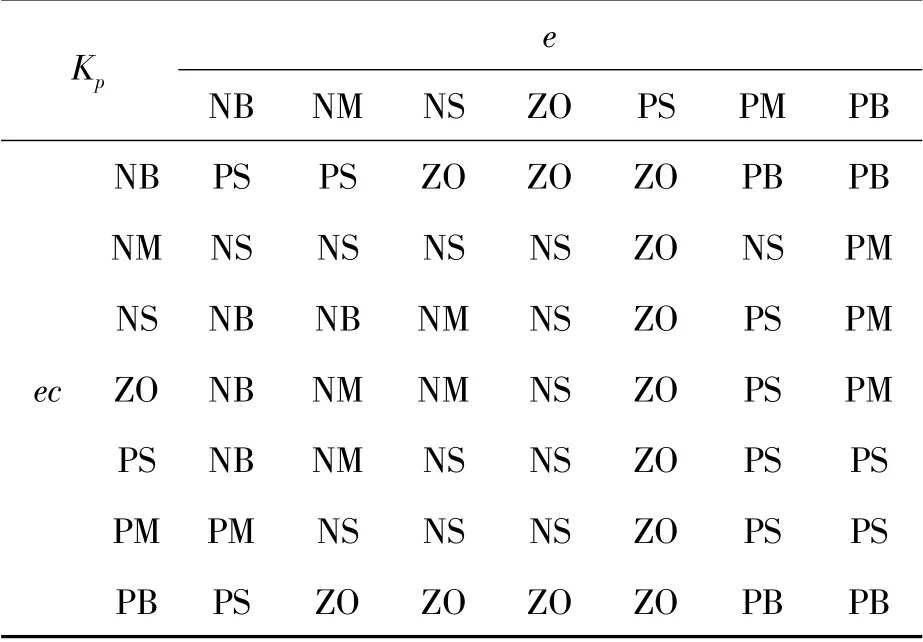
表4 Ki模糊控制规则

表5 Kd模糊控制规则
3 仿真分析
为了验证所设计的变论域自适应模糊PID控制器的性能,通过Matlab/Simulink进行系统的仿真实验分析,设置仿真时间为10 s,同时与被动悬置、模糊PID控制主动悬置中的动力总成垂直速度和垂直加速度进行相应对比,实验结果见图7、8。
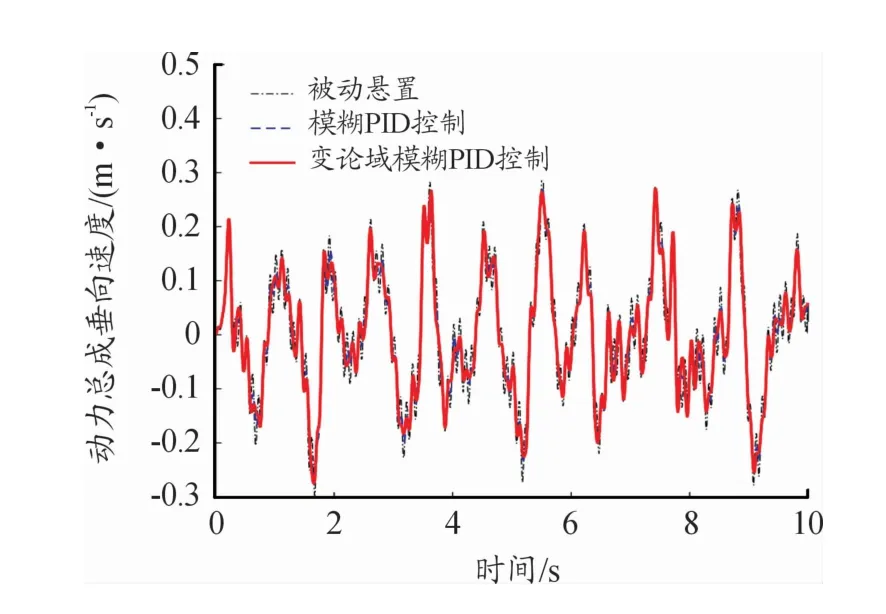
图7 动力总成垂直速度
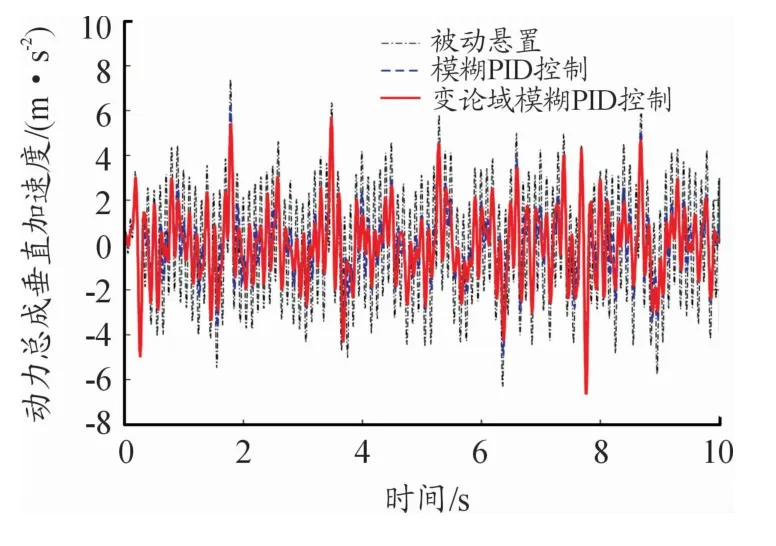
图8 动力总成垂直加速度
为了更加直观地比较被动悬置、模糊PID控制主动悬置、变论域自适应模糊PID控制主动悬置在仿真中的具体控制效果,引入Simulink中RMS模块对仿真结果进行二次均方根值计算,计算结果如表6所示。
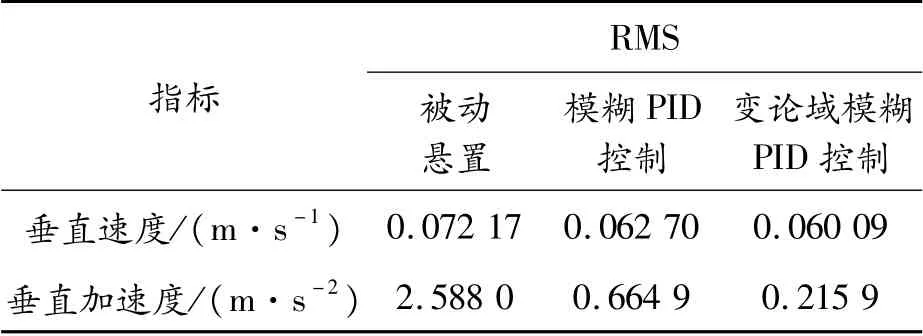
表6 结果数值
4 结论
1)动力总成垂直速度在模糊PID控制、变论域自适应模糊PID控制下分别下降了13.1%、16.7%,说明与被动悬置相比,主动控制悬置系统在垂向方面的振动得到了有效抑制。
2)动力总成垂直加速度在模糊PID控制、变论域自适应模糊PID控制下分别下降了74.3%、91.7%,说明主动控制悬置系统振动趋势大幅降低,其在动力总成和车身之间的位移得到了控制。
3)变论域自适应模糊PID控制在主动悬置控制系统中优于模糊PID控制,说明所设计的变论域自适应模糊PID控制器在悬置系统中起到了预期的控制效果,在汽车行驶过程中能够有效降低动力总成的振动,提升驾驶过程中的舒适性。
