考虑摩擦时刚性直杆倾倒的运动分析1)
2021-07-14李浩隆冯维明
李浩隆 冯维明
(山东大学土建与水利学院,济南250061)
经典力学中常见关于刚性直杆自由倾倒的问题(图1),可利用动量定理、动量矩定理和动能定理来分析杆件在倾倒过程的运动。但教材中此问题多见于理想状态下(考虑地面为光滑的)运动学分析和动力学分析[1-2]。如果考虑一般情况下即地面有摩擦时刚性直杆倾倒过程,问题立刻就复杂了许多,2017年《力学与实践》曾就此问题公开征集解答[3],这也引起了许多任课教师和在校学生的兴趣,近年来不少学者对此问题展开讨论,表达了自己的见解。在早期的文献中,王晓云[4]计算了刚性杆完全倒地的时间,假设杆始终做定轴转动,把杆触地端理想地看作铰链;2000年,高桂林等[5]讨论了刚性杆在有摩擦的水平面上倾倒过程的力学分析,文章注意到了摩擦力在杆件倾倒过程会改变方向,研究了在特定摩擦因数下杆件触地端约束力分析和运动分析,但缺乏一般情形下的相关分析,所以对可能出现的一些现象没有进一步解释;2018年,唐有绮等[6]再一次对刚性直杆倾倒过程进行了动态分析,通过数值解分析了直杆角位移、角速度、触地端摩擦力等随时间变化的规律,虽比前者分析更深入,但仍然欠缺全面分析,且其杆件触地端摩擦力“始终向右”和摩擦力较大时杆件倾倒过程一直做定轴转动的结论都是不正确的;同一时间,苏振超等[7]研究了直杆倾倒时开始打滑的打滑角与摩擦因数的关系,通过对一道习题的分析,设计了已知打滑角求摩擦因数和已知摩擦因数求打滑角正反两个问题,并得出了摩擦因数与打滑角关系的曲线图,但图中有一段曲线无意义,没有得到打滑角与摩擦因数的完整关系,对杆触地端滑动后的运动方向的判断缺乏完整性;同年胡开鑫等[8]就此问题给出了两点结论,均质杆倾倒过程中触地端不会脱离地面且可在两相反方向滑动,否定了文献[6]的结论,并为此给出简单的证明,但其杆触地端左右滑动的判定条件值得商榷。2019年,张九铸[9]讨论了均质直杆无滑动倾倒时触地端脱离水平面的条件,认为在某一角度“一定能实现无滑动脱离水平面”,该文的结论与文献[5,8]是矛盾的。综上所述,此前的研究主要是建立动力学方程并进行数值求解,没有求得解析解,对于摩擦因数与打滑角关系的认识不够深入,对不同摩擦因数下杆运动的求解不够完整,甚至有些错误的结论。本文将尽可能对均质直杆倾倒过程进行完整的分析,对各种可能出现的现象进行分析,并对某些结论进行具有可信度的验证,弥补以往研究中的缺陷,提出对前期研究不同的思考以供大家讨论。
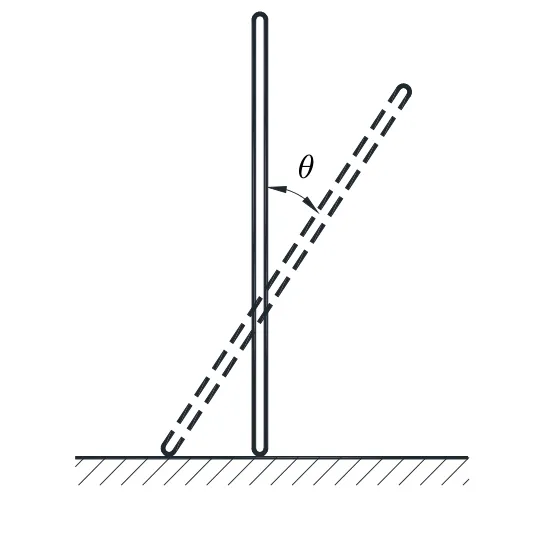
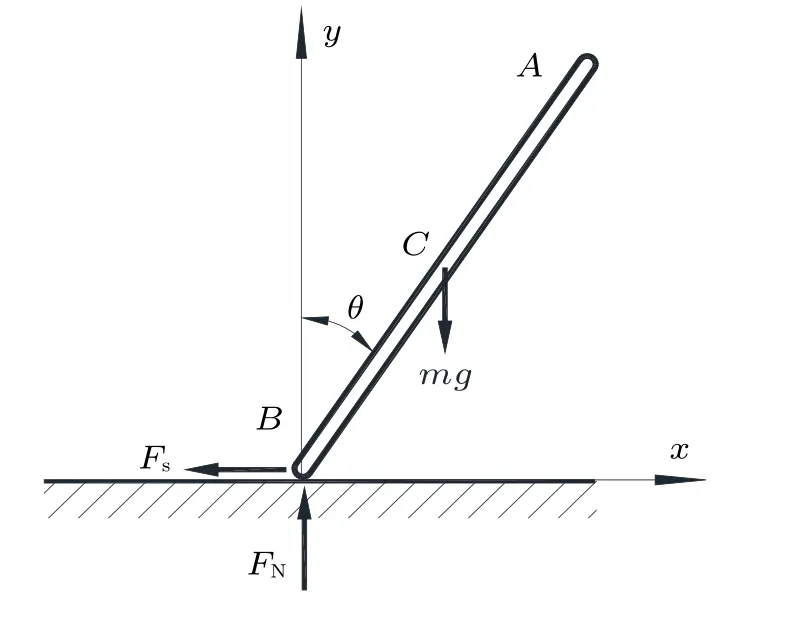
图1 直杆倾倒示意图
1 动力学建模与分析
一质量为m,长为l的均质直杆竖直立在地面上,杆与地面的摩擦因数为f,随后受到微扰开始自由倾倒,如图2,刚开始运动时θ较小,杆先做定轴转动,随后杆触地端开始打滑,设打滑角度为θ1,之后杆做平面运动,那么自然有这样的问题:打滑角θ1如何确定?杆做平面运动状态是怎样的?如何求解杆触地端的位移?
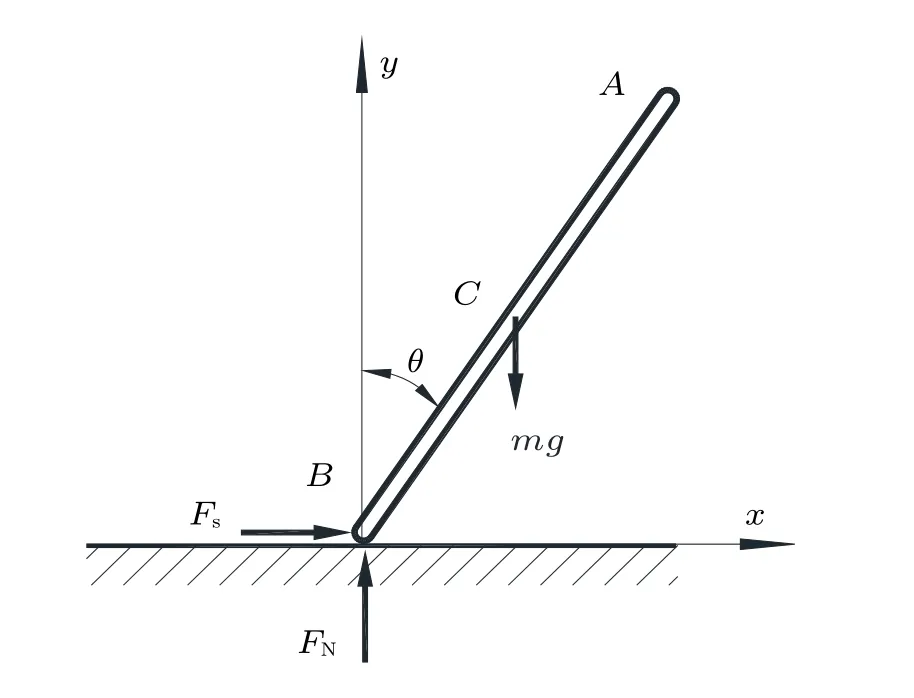
图2 杆做定轴转动时的受力分析图
1.1 定轴转动过程
设杆角速度为ω,由动能定理

得

则质心C的水平速度为

式(2)再次对t求导得

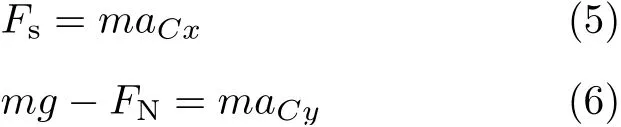
设a Cx和a Cy为杆质心C的加速度沿x和y轴的分量,如图3,由质心运动定理
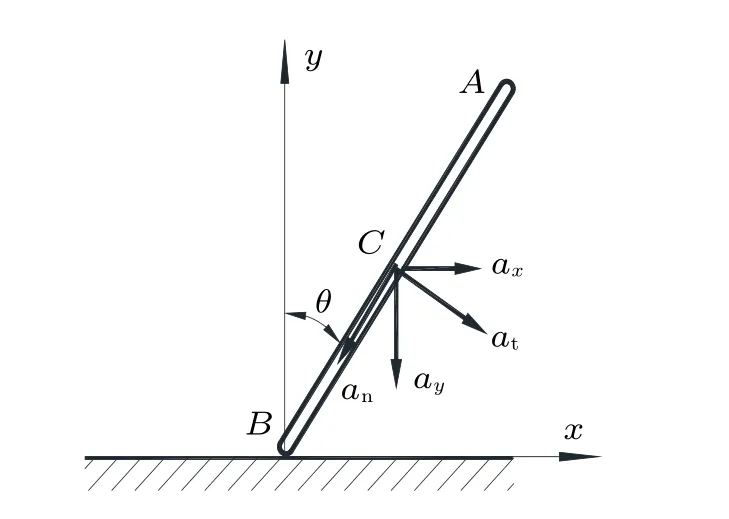
图3 杆做定轴转动时质心加速度的两种分解图
将a Cx和a Cy用切向加速度at和法向加速度an分别表示

又at=αl/2,an=ω2/2。
同时将式(7)、式(8)分别代入式(5)、式(6)求得
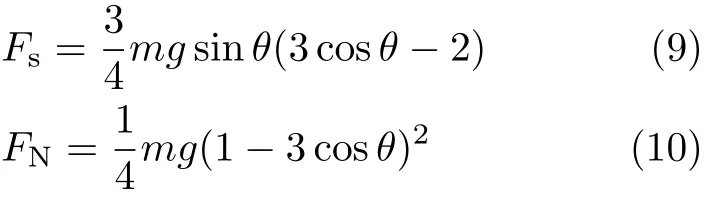
显然FN≥0,当且仅当θ=arccos1/3≈70.5°时取等号,故杆在定轴转动时不会跳起。对于Fs,在定轴转动过程中,当θ≤2arccos1/3≈48.2°时,Fs≥0,也就是摩擦力向x轴正向,此时杆触地端不打滑所要求的最小f满足Fs=f FN;当θ≥48.2°时,Fs≤0,也就是摩擦力向x轴负向,此时最小f应满足Fs=−f FN,故统一地有

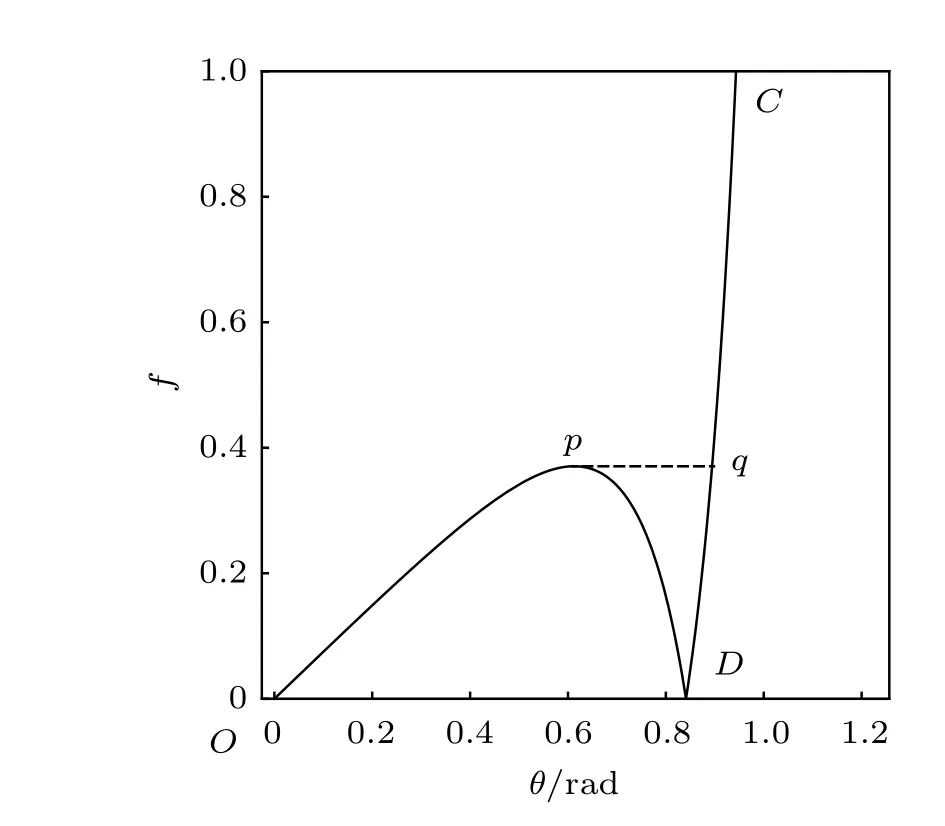
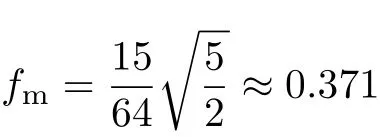
图4 f关于θ的函数曲线图
由f′(θ)=0,得,代入式(11)可得曲线极大值
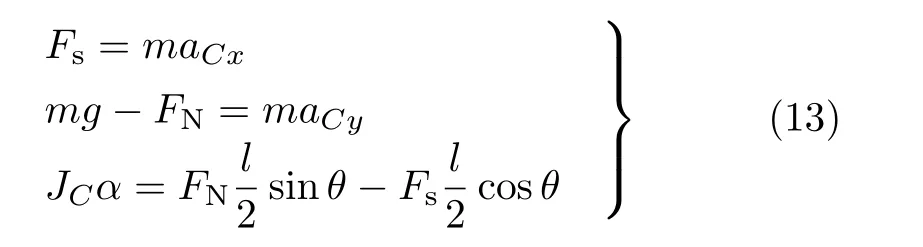
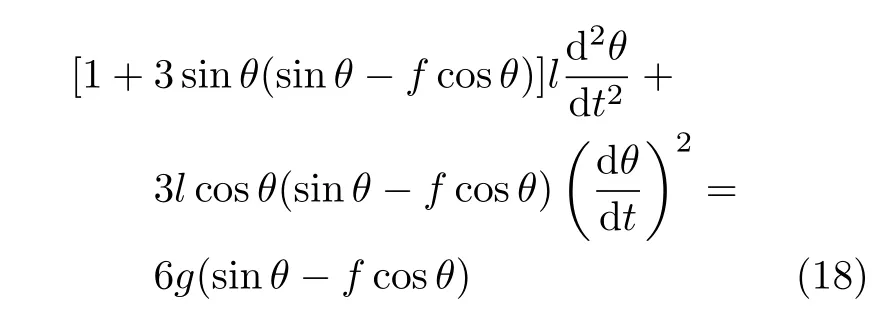
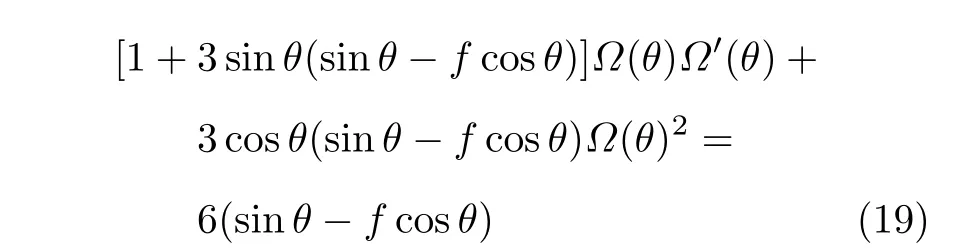
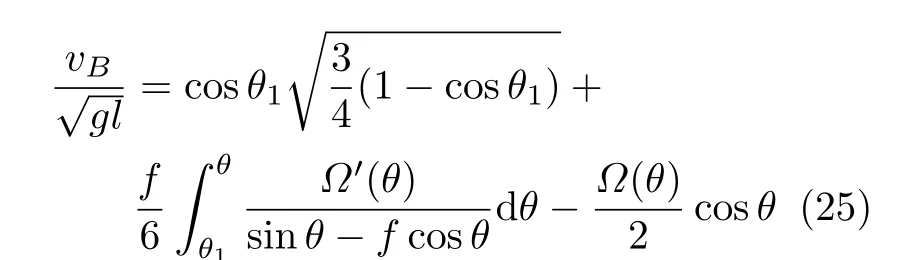
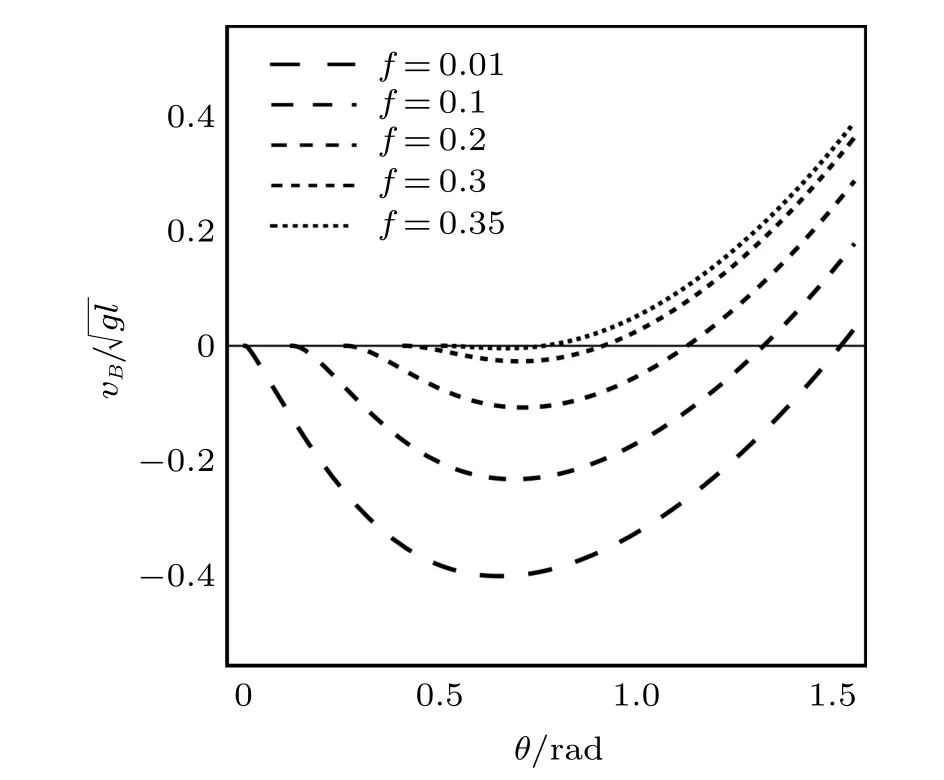
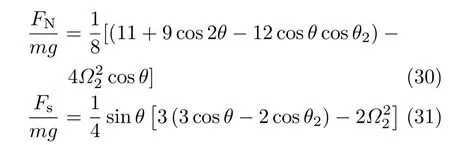
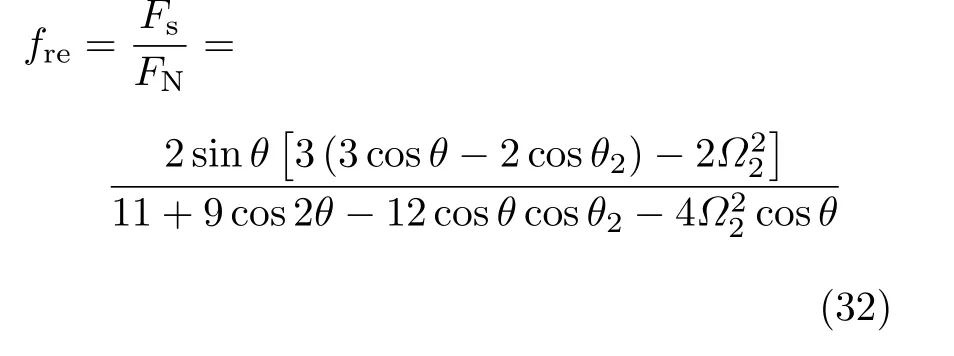
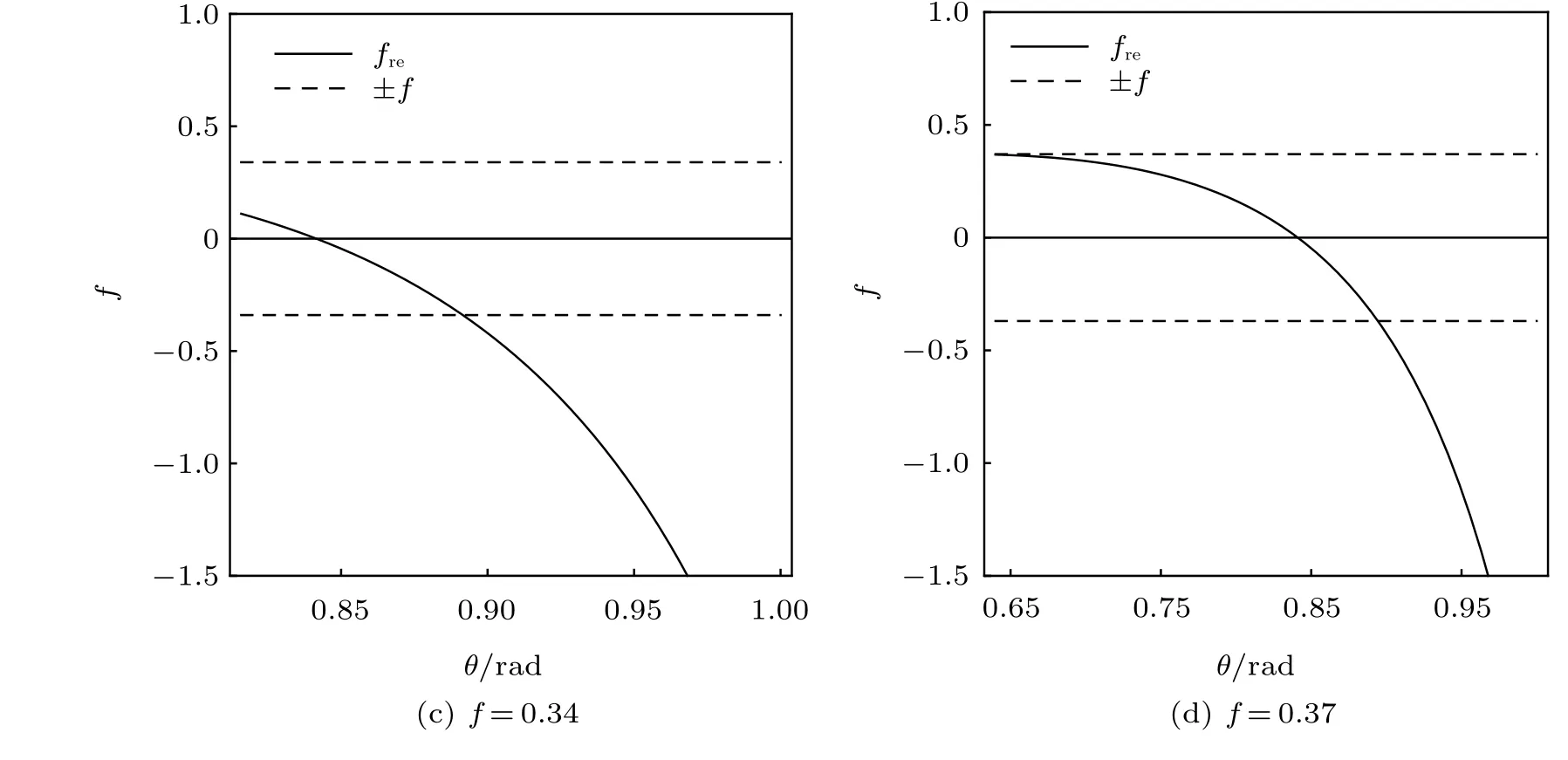
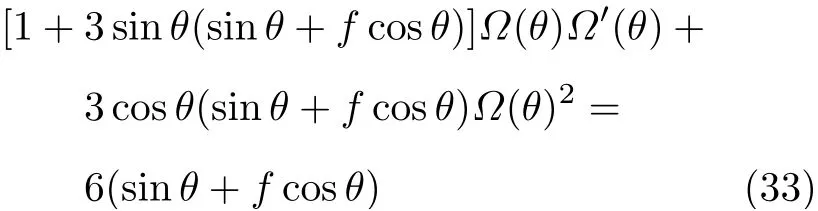
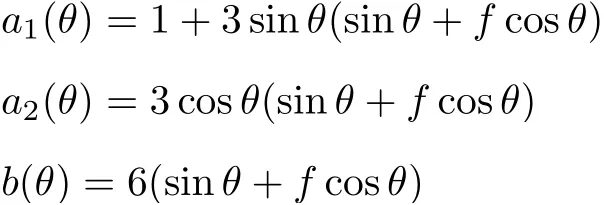
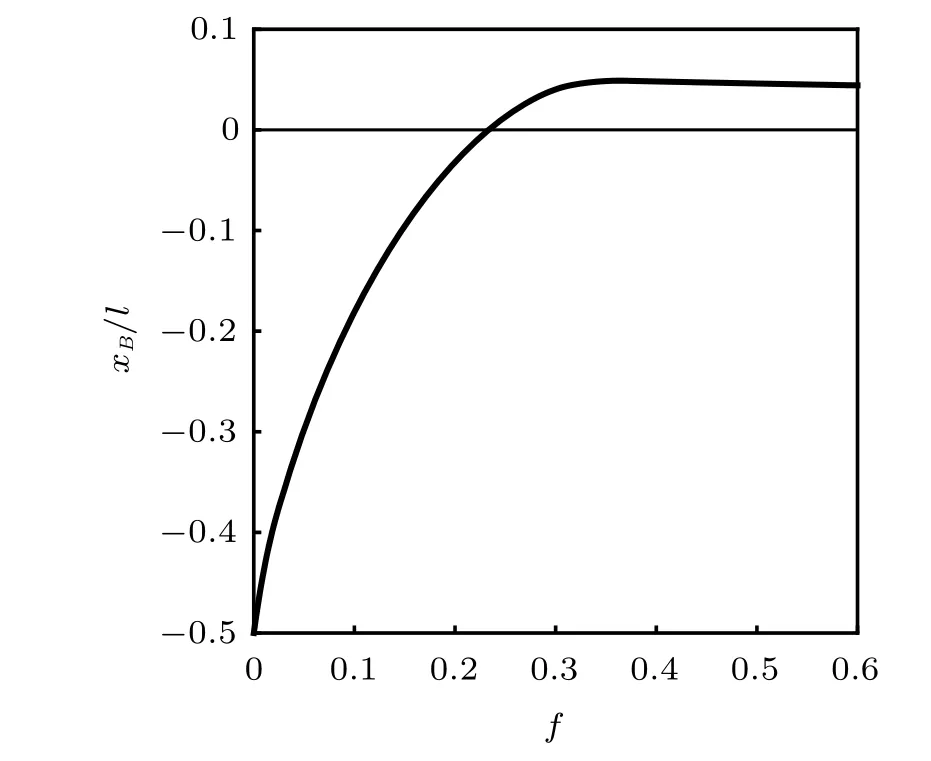
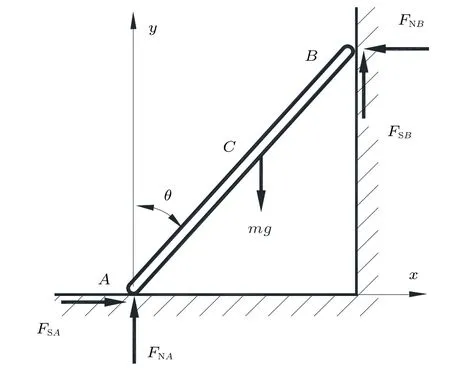
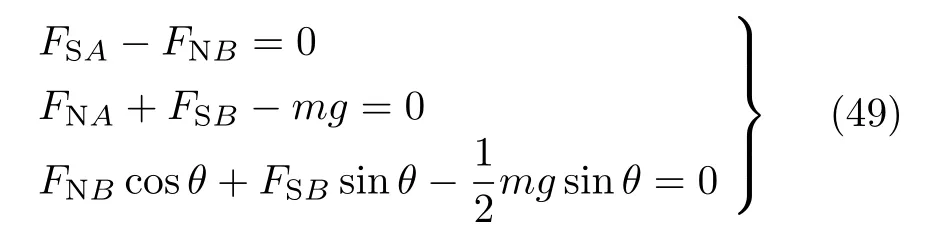
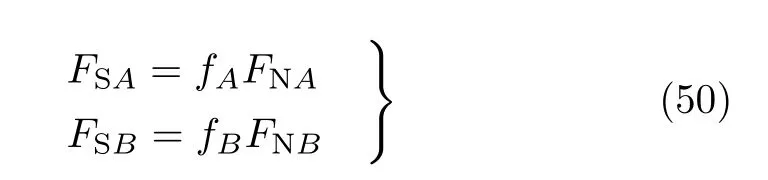
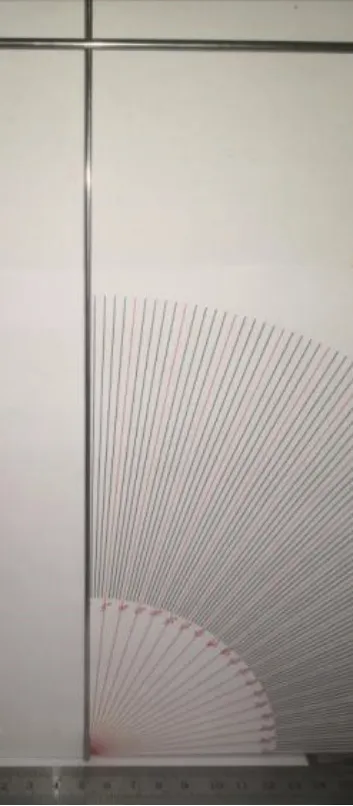
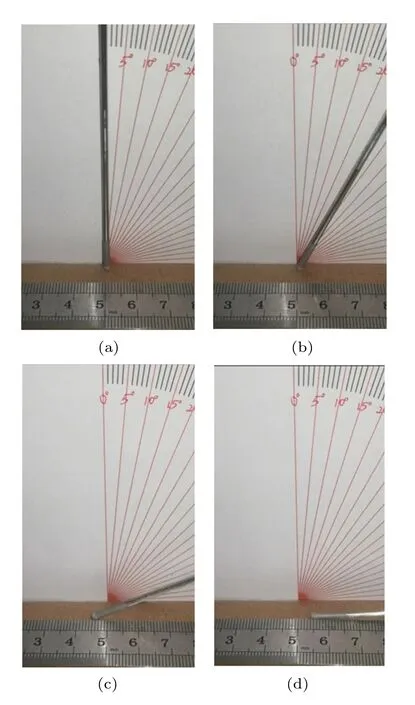
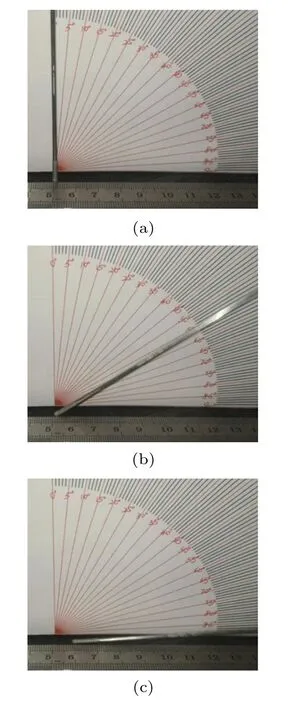
设此极值点为p,过p做平行于x轴的线交曲线于点q,q点横坐标为0.894,约等于51.2°。需要注意,图4是在定轴转动的情形(即式(11))下画出的,一旦触地端开始滑动,杆就进入平面运动状态,动力学方程将在后文给出。在f 由上面讨论可知,直杆倾倒过程中首先发生定轴转动(除f=0外),其次是平面运动,杆件触地端运动过程以摩擦因数fm为界而不同。因此,需分别讨论。 1.2.1f 此时杆打滑的θ1满足 由刚体质心平面运动微分方程 由滑动摩擦(见图2) 联立式(13)和式(14)可得 如图5,以C为基点,B为动点,B点加速度表示为 图5 杆做平面运动时的加速度分析图 向y轴正向投影得 联立式(15)和式(17),注意到α=d2θ/dt2,ω=dθ/dt,可以得到关于θ(t)的二阶非线性非齐次微分方程 式(18)没有解析解,利用变换d2θ/dt2=ωdω/dθ,并定义无量纲角速度化简得 进一步整理得 它为n=−1的Bernoulli微分方程[10],其中 所以方程通解为 对于f=0的情况,式(20)可以积出 但f0时,无法全部积出。 在初步的分析中,往往认为触地端的运动是单向的,但实际上不然。 以C为基点,B为动点,则B点速度为 质心任意时刻的水平速度表示为 其中a Cx为质心水平加速度式(15),v Cx0为触地端开始滑动时质心的速度,由式(3)知 将式(23)代入式(22),整理可得 图6 不同摩擦因数下v B/随θ变化的曲线 当触地端速度为零时,杆要么定轴转动,要么转而正向滑动,可以先判断杆能否定轴转动。 设杆从θ=θ2开始定轴转动,此时杆角速度为ω2。 由动能定理 得 加速度仍为式(4),由式(5)~式(8)得 将式(4)、式(27)代入式(28)、式(29)得无量纲力 取f为0.31,0.32,0.34,0.37,如图7,虚线代表±f,实线代表fre,随着杆的倾倒,角度不断增大,杆定轴转动所需的最小摩擦因数也在变化,fre为正代表摩擦力也是正向,注意到f大于一定值时,实线有一段落在虚线范围内,杆可以定轴转动,后数值求解得到此值约为0.317。当实线与虚线相交时,杆开始打滑,设为θ3,由图可知当f∈(0.317,0.370),打滑时fre<0,则摩擦力方向为x轴负向,杆只能正向打滑。 图7 不同摩擦因数下杆所需的最小摩擦因数图(续) 式(11)中以θ为自变量,但实际上杆的运动特性由摩擦因数f决定,结合对图4的讨论,把f作为自变量,并略去没有物理意义的多解分支,数值求解得到杆第一次打滑角θ1与f的关系,通过数值求解式(25)的零点,得到杆触地端减速为零时杆的倾斜角θ2,通过求解|fre|=f,得到第二次杆定轴转动的打滑角θ3,将θ1,θ2和θ3画在一个图里,如图8。 图8 θ1,θ2,θ3与f的关系曲线 f轴可以分成三段:(0,0.317)、(0.317,0.370)、(0.370,+∞),分别对应三种情况。第一段内,杆从竖直开始倾倒,先定轴转动,然后触地端打滑开始负向运动,减速为0后开始正向运动,直至落地;第二段内,杆从竖直开始倾倒,先定轴转动,然后触地端打滑开始负向运动,减速为0后开始定轴转动,之后打滑开始正向滑动直至落地;第三段内,杆从竖直开始倾倒,先定轴转动,然后触地端打滑开始正向运动,直至落地。 当杆正向滑动后(图9),摩擦力反向,需将式(14)改为Fs=−f FN,可以看做是将摩擦因数变为相反数,故运动方程应为 图9 杆正向滑动时的受力分析 当f∈(0,0.317)时,此方程初值由式(19)得到,当f∈(0.317,0.370)时,方程初值由式(27)得到。 1.2.2f>fm时的杆件平面运动 此时杆打滑的θ1满足 运动方程同式(33),通解同式(20),其中 代入初值条件,求得 还要指出对任意的摩擦因数杆均不能跳起。设杆定轴转动最后一刻的动能为E0,此后杆将发生平面运动,触地端将会向x轴正向滑动,角速度和角度的关系难以精确求出,故利用放缩的办法,假设此时杆继续定轴转动,此后角速度为ω1,由动能定理可知 其中WG为杆转到θ时重力做的功。 但实际上,杆为平面运动,角速度为ω2,质心速度大小为v2,由动能定理可知 其中Wf为摩擦力做功的大小,利用速度叠加求得 式(36)减去式(37)得 由于式(12)右端大于零,则 而ω1是定轴转动的角速度,可见打滑时的角速度比定轴转动时的更小,利用式(13)和式(17)与补充条件Fs=−f FN,求得无量纲反力 放缩得 代入式(2)得 这样,证明了支反力恒正。其他摩擦因数下的证明思路一致,这里不再赘述。 当f 当θ1<θ<θ2时,利用式(22)知负向位移为 其中t1为杆触地端开始滑动的时刻,t2为停止滑动(或开始反向滑动)的时刻 将式(23)代入式(42),经部分积分后可得 其中第三项利用换元法把积分变量换为θ 由于位移与杆的长度有关,式(42)两端同除杆长l,得到无量纲位移x B1/l 同理可推得,当θi<θ<π/2时,无量纲正向位移为 当f∈(0,0.317)时,θi取θ2,当f∈(0.317,0.370)时,θi取θ3,故触地端总位移x B/l=x B1/l+x B2/l。 当f≥fm时,触地端只有正向位移,同样可导出触地端位移表达式为 得到触地端最终位移与摩擦因数的关系曲线,如图10。 图10 x B/l与f的关系曲线 图10中的曲线在f=0.233附近有零点,也就是此时触地端会回到初始位置,曲线在f=0.364附近有极大值点,极大值约为0.049,此时触地端离初始位置最远。 考虑到滑动摩擦因数测试较为困难,本实验主要通过测得静摩擦因数后,测试从定轴转动到初始滑动的临界角度,即图4中所示初始滑动临界曲线。同时验证对应不同摩擦因数杆触地端的运动状态。首先需要取不同的介质获得不同的摩擦因数,然后对应在不同介质表面进行直杆倾倒实验。 实验选用均质的细长不锈钢杆,长300 mm,直径2 mm,两端打磨成弧形,并均匀地裹上一层硬脂酸,以保证在滑动过程中摩擦因数的均匀性。 静摩擦因数的直接测量较难,可以通过图11的方法进行间接测量:将杆靠在直角墙面上,设杆与铅锤方向夹角为θ,释放后,如果杆打滑,就减小角度再重新摆放,如果不打滑则小心增大角度再重新摆放,精细调整至临界状态。 图11 杆受力分析图 设A和B段支反力和摩擦力分别为FNA,FSA,FNB,FSB,摩擦因数分别为f A和f B,当杆达到临界平衡时,由平衡方程得 由于上、下端均达到最大静摩擦力,则补充方程为 式(49)和式(50)共五个方程,却有六个未知量,故可以认为一端摩擦因数已知,来测量另一端摩擦因数,如f B已知,可求得 B端的摩擦因数可以这样求得,将水平面与垂直面用同一种材质,此时A和B端摩擦因数相同,可设为f,从式(51)可解出 选定水平面和垂直面材质均为A4纸,测得临界角为39°,则f B=f=0.354。下面的实验中,垂直面的材质保持不变(A4纸),更换水平面的材质重复上述实验过程获得相应的临界角,通过式(39)确定A处相应的摩擦因数,所得结果如表1所示。 表1 不同材料下的摩擦因数 为了控制直杆倒下的方向,直杆的顶部靠在一根光滑的细钢杆上,直杆后面有角度表,用高速摄像录制直杆倾倒的过程,通过回放可以读出杆触地端滑动时的临界角,准备就绪的装置如图12。 图12 倾倒装置示意图 实验得到的不同摩擦因数下初次滑动临界角如图13所示,图中曲线为理论值(见图4),各点为实验值。整体趋势较为符合理论解。这里必须正视两个偏差:(1)静摩擦因数是在尽可能保持杆件不受其他因素影响下(如保持绝对静止)测得的最大静摩擦因数。但杆件倾倒过程测试时,从定轴转动到触地端开始滑动前难以符合静摩擦因数的测试环境,因此实际摩擦因数降低了(介于静、动摩擦因数之间);(2)慢镜头实际观察滑动临界角时仍有延迟,测量结果整体偏大(即图中各点偏右)。 图13 实验值与理论曲线对比图 图14为摩擦因数f=0.29时杆的运动状态。图14(a)为初始位置,杆触地端在刻度5的位置;图14(b)为定轴转动过程,杆触地端仍在刻度5的位置;图14(c)为杆触地端反向滑动过程中,杆触地端位于刻度5的左边;图14(d)为杆触地端正向滑动过程中,杆触地端位于刻度5的右边,定性验证了当f<0.317时,杆倾倒过程的运动分析。 图14 f=0.29时,直杆倾倒过程截图 图15为摩擦因数f=0.519时杆的运动状态。图15(a)为初始位置,杆触地端在刻度5的位置;图15(b)为定轴转动过程,杆触地端仍在刻度5的位置;图15(c)为杆触地端正向滑动过程中,杆触地端位于刻度5的右边;杆倾倒过程中无反向滑动。定性验证了当f>fm(0.370)时,杆倾倒过程的运动分析。 图15 f=0.519时,直杆倾倒过程截图 f∈(0.317,0.370)时,杆虽然存在第二次定轴转动,但时间极短,并且前述分析并未考虑动静摩擦因数的不同,在实际实验时,难以准确地观测到第二次定轴转动。 另外无论在何种摩擦因数下,杆触地端均无跳离地面的现象。 本文利用理论力学、常微分方程等相关知识,分析了考虑摩擦的刚性直杆倾倒的全过程,建立了完善的动力学模型,得到了直杆打滑角和反向角与摩擦因数的关系,同时利用直杆触地端位移的表达式,得到了触地端最终位移与摩擦因数的关系曲线,通过实验验证了部分现象,对以往的部分错误进行了纠正,并得到如下结论: (1)刚性直杆在自由倾倒过程中,无论杆与地面的摩擦因数为何值,杆触地端在某一个倾角都会滑动; (2)当摩擦因数f∈(0,0.317)时,杆触地端有静止(即定轴转动)、反向滑动和正向滑动三个阶段;当摩擦因数f∈(0.317,0.370)时,杆触地端有静止(即定轴转动)、反向滑动、静止(即第二次定轴转动)和正向滑动四个阶段;当摩擦因数f∈(0.370,+∞)时,杆触地端有静止(即定轴转动)和正向滑动两个阶段; (3)均质刚性直杆在自由倾倒过程中,无论杆与地面的摩擦因数为何值,杆触地端都不会跳离地面。 由于篇幅所限,本文没有再考虑动静摩擦因数不等的情况,如果考虑,思路基本不变,只需对各运动模型中的摩擦因数作区分,可以得到新的结论,并且更接近真实的运动情况,但同时也会带来求解与表述上的困难,此外本文的实验也以定性验证为主,还可以在更好的实验条件下对更多的结论进行验证。1.2 平面运动过程



















2 触地端位移分析


3 实验验证
3.1 摩擦因数的测量



3.2 触地端初次滑动临界角测试
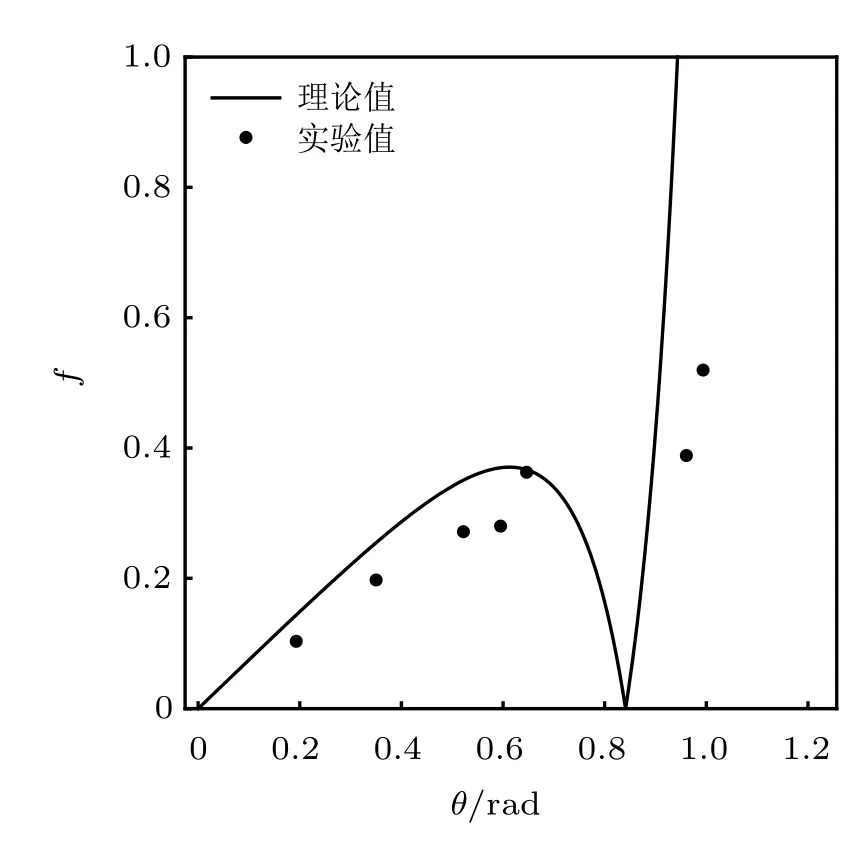
3.3 触地端运动状态验证
4 结论与展望
