基于旋量理论的模块化机械臂动力学建模
2021-07-14李宪华
吴 亮, 李宪华, 孙 青, 宋 韬,3
(1.安徽理工大学 机械工程学院, 安徽 淮南 232001; 2.上海大学 机电工程与自动化学院, 上海 200444; 3.上海机器人产业技术研究院有限公司, 上海 200063)
机器人动力学问题包括动力学正问题和动力学逆问题,正问题与机械臂的动力学仿真研究有关,逆问题则是为了实时控制的需要,利用动力学模型实现最优控制,以达到良好的动态性能和最优指标。目前,机器人动力学的研究方法有很多,较为常见的有Lagrange方法和Newton-Euler方法。Lagrange方法建模过程相对简单,系统性更强,但是计算量特别大,不适合实时计算;Newton-Euler方法则没有多余信息,计算速度快[1]。在机器人动力学建模前需要对机械臂的参数进行描述,较为常见的是D-H参数法[2]。在D-H 参数法中,各连杆相对于前一连杆建立坐标系,得到的是各个连杆相对于前一连杆的相对运动。D-H 参数法应用相对成熟,在机器人实际应用中也较为广泛。近年来,旋量法[3-5]在机器人建模方面得到了很多重视。以旋量进行机器人运动描述的最大优点是:各连杆是相对于机器人底座建立坐标系的,同时各连杆的旋量具有明确的几何意义,从而简化了机器人。王红旗等[6]基于旋量理论并利用Lagrange原理对移动机械手动力学建模。郭冰菁等[7]基于旋量理论对步态康复机器人进行了动力学的建模及仿真,验证了动力学模型的正确性。
本文基于旋量理论对6自由度模块化机械臂进行动力学建模与分析。首先,基于旋量理论建立机械臂动力学方程,通过逆动力学方程求解机械臂各关节的关节驱动力矩。然后,通过正动力学方程进行仿真,求解机械臂实际的关节位移、关节速度和关节加速度。最后,验证了机械臂动力学方程的正确性。
1 旋量理论基础
1.1 刚体运动的旋量表示


(1)
ξ=(vT,ωT)T
(2)

在旋量理论中,刚体的旋转运动可由运动旋量指数积的形式表示:
(3)

将坐标系{B}固定在刚体上,坐标系{B}相对于基坐标系{S}的位姿可以用gab表示,初始状态下的位姿为gab(0),当刚体转动θ后的位姿为:
(4)
1.2 速度旋量与力旋量
假设与刚体相联的坐标系{B}相对于固定参考系{A}的刚体运动,其轨迹曲线为gab(t)=SE(3),由于
(5)

(6)

(7)

刚体运动的空间速度与物体速度之间存在如下关系:
(8)
上式将运动旋量由一个坐标系变换到另一个坐标系的矩阵称为关于g的伴随变换,记为:
(9)
刚体运动的空间速度为:
(10)
因此,对应于该运动的空间速度即为由旋量产生的速度。
伴随变换也能作用于力旋量,作用在刚体上的力旋量由纯力f和作用在一点的纯力矩τ组合而成:
(11)
在坐标系{B}中表示的一个力旋量Fb可由一个坐标系变换到另一个坐标系{A}中,即:
(12)
2 机械臂动力学建模
本文以6自由度模块化机械臂为研究对象,该机械臂由6个转动关节串联构成,其三维模型以及简化构型如图1所示。其中:坐标系{S}为机械臂的基坐标系或惯性坐标系;坐标系{T}为机械臂的工具坐标系;ξi为各关节的运动螺旋。

图1 机械臂三维模型和坐标系
根据机械臂初始构型及建立的坐标系,可以列出各关节运动旋量的单位轴线向量ωi和轴线上的任意一点qi如表1所示。根据式(1)和式(2)即可求得初始时刻在基坐标系下表示的各关节运动旋量ξi=(vi,ωi),再根据旋量理论求得机械臂的运动学方程。
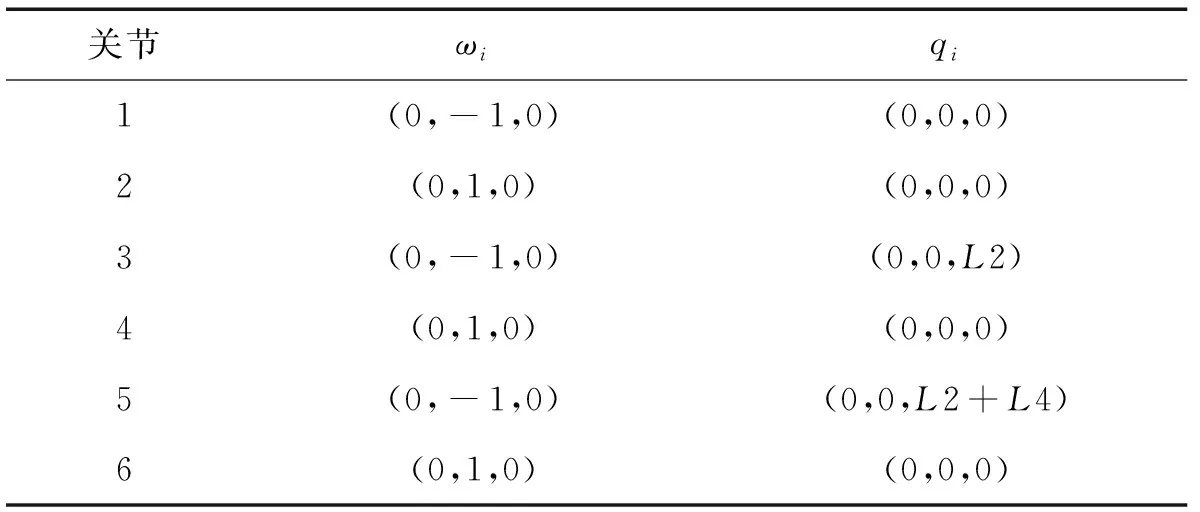
表1 关节轴线单位向量和轴线上的点
从基座到末端执行器为各连杆设置固定在连杆的坐标系{i},基坐标系可视为{0}。各连杆坐标系相对于基坐标系的位姿为T0,i(0),并且坐标系在初始时刻姿态都与基坐标系相同,坐标系原点位置则与qi点重合,关节坐标系{i-1}相对于相邻的坐标系{i}的变换为:
(13)
设Φi为连杆坐标系{i}中表示的关节运动旋量,则Φi可通过伴随变换求得:
(14)
坐标系{i-1}相对于相邻的坐标系{i}和之间的变换为:
(15)
(1) 向外递归。
由于串联式机械臂连杆的特性,可以通过递归的方式从连杆1到连杆6逐次计算出机械臂各连杆的广义速度。因此,在坐标系{i}下表示的连杆i的广义速度Vi为:
(16)
式中:当i=1时,V0为基座的速度。
对式(16)进行微分可得广义加速度为:
(17)
(2) 向内递归。
求得各连杆的速度和加速度后,对连杆进行受力分析如图2所示。连杆i将受到来自关节i和关节i+1的主动力,然后结合机械臂动力学参数(如表2所示)信息,可建立机械臂连杆i的Newton-Euler方程:
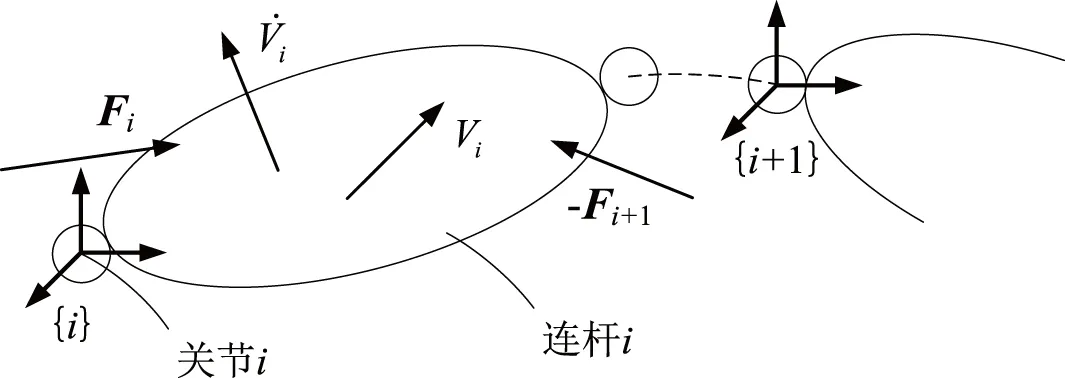
图2 机械臂连杆的受力分析

表2 机械臂的各连杆的质量参数
(18)
式中:Fi+1表示在坐标系{i+1}中,其余均表示在坐标{i}中;连杆的广义惯量Ii表示在坐标系{i}中,而惯性张量Ic表示在质心坐标系中。因此,需要变换至坐标系{i}中,可由下式求得:
(19)
(20)
式中:Ici为在连杆质心坐标系中表示的广义空间惯量;E为3×3的单位矩阵。
由式(18)可得关节i对连杆i的广义力为:
(21)
注意,当i=n时(n为关节总数),Ti+1,i=Tn+1,n为连杆n相对于工具坐标系的位姿变换;Fi+1=Fn+1为机械臂末端所受外界接触力在工具坐标系中的表示。由于在坐标系{i}中的关节运动螺旋为Φi,所以,关节i的驱动力矩为:
(22)
通过向外递归求得各连杆的广义速度和加速度,然后通过向内递归求得关节力矩。
可以将上述递归Newton-Euler 算法表达成一个状态空间方程:
(23)
(24)


(25)
(26)
3 仿真实验


(a)(b)图3 机械臂末端执行器位置曲线图


图4 各关节力矩的变化图

(a) (b)图5 机械臂末端执行器运动轨迹对比图

图6 仿真轨迹误差图
4 结 语
基于旋量理论对6自由度模块化机械臂进行相关参数的描述,采用了递归的Newton-Euler方法求解了机械臂的逆动力学方程和正动力学方程,最后进行了动力学仿真实验,首先设定机械臂关节轨迹,然后利用逆动力学方程求出理想状态的关节力矩函数,再将关节力矩函数代入正动力学方程中进行仿真,得到关节运动轨迹,通过对比验证了本文建立的机械臂动力学模型的正确性。