声自导鱼雷搜索航路威胁区域分析
2021-07-14赵向涛王佳婧石志军
赵向涛, 寇 祝, 王佳婧, 石志军
声自导鱼雷搜索航路威胁区域分析
赵向涛1, 寇 祝1, 王佳婧1, 石志军2
(1. 海军大连舰艇学院 水武与防化系, 辽宁 大连, 116018; 2. 中国人民解放军91184部队, 山东 青岛, 266071)
针对水面舰艇遭受声自导鱼雷攻击无法确定鱼雷航向问题, 给出了声自导鱼雷搜索航路威胁区的定义, 提出了威胁航向范围求解的迭代法和估算法。该方法从水面舰艇防御的角度出发, 在概略估计鱼雷位置及航速情况下, 直观地给出声自导鱼雷有效攻击航向范围, 从而确定鱼雷的威胁区, 为水面舰艇鱼雷防御决策提供理论依据。相比于以往仅凭经验判断来袭鱼雷信息, 论文方法可有效地缩小来袭鱼雷威胁区范围, 在舰艇火控系统中嵌入该算法可以实时判断并显示来袭鱼雷的威胁区, 从而提高水面舰艇水下拦截的效率。
声自导鱼雷; 水面舰艇; 鱼雷防御; 威胁区
0 引言
水面舰艇防御潜射鱼雷攻击一直是水下防御的重点问题[1], 因涉及军事信息, 所以相关领域的研究甚少公开。鱼雷攻击具有突然性, 这给防御鱼雷带来极大困难, 无论是采取规避机动、拦截毁伤还是诱骗对抗, 都需要了解鱼雷攻击态势, 具体需要确定鱼雷的方位、距离、航向和航速[2]。实际作战过程中, 水面舰艇防御鱼雷过程非常短暂, 通常在几分钟的时间, 在如此紧迫的形势下, 要通过探测系统准确掌握目标的运动要素比较困难[3]。比如, 通过被动鱼雷预警探测距离较远, 但是在只有方位信息条件下无法对鱼雷准确定位, 即使可以进行定位也存在较大的误差。如果进一步通过平滑、滤波可以测得比较准确的目标运动要素, 但又需要较长的解算时间[4]。
基于上述原因, 从水面舰艇防御的角度考虑, 需要在概略估计鱼雷位置及航速的情况下, 分析鱼雷有效攻击航向范围[5], 为防御决策提供依据。
1 声自导鱼雷反舰攻击弹道分析
潜射声自导鱼雷从发射到攻击命中目标全过程中, 其弹道主要包括发射管内弹道、鱼雷初始弹道(舵管制下非控航行弹道)、寻深和初始转角程序弹道、搜索弹道、自导导引弹道、丢失后再搜索程序弹道等[6]。现代反舰鱼雷一般航程在几千米至几十千米, 没有线导的鱼雷航程在10 km左右[7], 可见现代反舰鱼雷都具有较远距离攻击的能力, 从潜艇隐蔽实施反舰鱼雷攻击的角度来看, 在满足鱼雷攻击概率条件下, 远距离反舰鱼雷攻击也是潜艇攻击舰艇的优先方案[8]。鱼雷经过内弹道发射后, 经过初始弹道和寻深转角程序弹道后, 声自导搜索发现目标前, 多数时间处于搜索弹道[9]。
从鱼雷防御角度, 将声自导鱼雷攻击划分为2个主要阶段: 1) 自导鱼雷搜索阶段, 鱼雷发射后按照预定航向接近搜索水面舰艇目标, 在发现目标前通常处于直航状态; 2) 鱼雷自导跟踪阶段, 自导鱼雷发现目标以后, 按照预定程序, 跟踪目标直至命中目标。
对于水面舰艇来说, 鱼雷处于搜索目标过程中正是进行防御作战的最佳时期, 一旦鱼雷捕捉到舰艇, 进入近距离自导弹道阶段, 应采取规避机动等对抗鱼雷措施。
2 声自导鱼雷搜索航路威胁区
如果水面舰艇在声自导鱼雷直航搜索目标阶段发现目标, 需要在假定鱼雷距离和航速范围的情况下, 分析其能够搜索发现水面舰艇的可能航路范围, 从而确定鱼雷威胁区, 以便进一步采取对抗措施对抗鱼雷, 保障水面舰艇安全。
假设声自导鱼雷与舰艇相对位置、鱼雷航速、鱼雷声自导作用距离及自导搜索扇面已知, 则可以确定鱼雷捕捉舰艇目标可能航路范围, 从而确定以鱼雷位置为中心, 鱼雷可能航向范围所覆盖的扇面, 称之为声自导鱼雷搜索航路威胁区。
由声自导鱼雷命中原理[10]可知, 在已知鱼雷相对舰艇位置(舷角、距离), 鱼雷航速、自导扇面角度、自导距离和射击提前角这些条件下, 可以确定舰艇相对鱼雷航向, 根据舰艇相对航向线是否经过鱼雷自导扇面来判断鱼雷是否可以搜索捕捉舰艇。
2.1 威胁航路解算原理范围


2.2 迭代法
1) 初始化
按照直航鱼雷接近目标原则, 确定初始射击提前角为

其中, 右舷为+, 左舷为-。
2) 确定提前角取值范围
3) 计算舰艇相对速度


图2 声自导鱼雷提前角解算原理示意图
进一步通过正弦定理求得

相对速度方向位于舰艇的舷角为


5) 判断退出
注意: 上述方法求解过程采用解析法, 一是要求鱼雷速度大于舰艇速度, 二是要求鱼雷与舰艇距离大于鱼雷声自导作用距离。
2.3 估算法



2) 求解自导扇面舷长
3) 求威胁航向范围的夹角

2.4 仿真验证
1) 算例1
目标航向90°、航速12 kn, 鱼雷位于目标舷角70°、距离5 000 m、航速40 kn、声自导作用距离1 500 m、自导扇面70°。

2) 算例2
目标航向90°、航速12 kn, 鱼雷位于目标舷角30°、距离5 000 m、航速40 kn、声自导作用距离1 500 m、自导扇面70°。
以上2个算例说明了估算法相较更为准确。不同舷角态势下, 在鱼雷速度远大于舰艇速度的情况下, 鱼雷搜索威胁航路角度范围变化很小。如果舰艇速度较高, 鱼雷处于尾追态势, 大舷角攻击威胁区开角较小, 小舷角攻击威胁区开角较大, 这主要是由鱼雷捕捉到目标前的航行距离较远造成。
3 仿真分析

3.1 鱼雷航速影响
鱼雷航速取值在一定范围内, 对鱼雷攻击目标有一定影响[11], 其搜索航路威胁区会发生变化, 主要是提前角不同。鱼雷航速较高时射击提前角绝对值较小, 航速比较低时, 射击提前角绝对值较大。故此, 在鱼雷航速可能变化的情况下, 鱼雷搜索航路威胁区开角将扩大。
但是射击提前角变化又与鱼雷攻击时所处的舷角有关, 通过以下算例分析。
仿真条件: 目标航向90°、航速12 kn、鱼雷位于目标舷角0~180°、距离5 000 m、航速30 kn、声自导作用距离1 500 m、自导扇面70°, 鱼雷航速分别为30、40和50 kn。仿真计算结果统计见表1和图4, 图4中纯色填充扇面为高速目标威胁区, 斜线填充扇面为低速目标威胁区。
舰艇正横附近鱼雷攻击提前角大于舰艇首尾方向鱼雷攻击提前角, 所以不同航速鱼雷攻击舰艇的搜索航路威胁区在正横附近影响较大, 而在首尾方向影响较小。
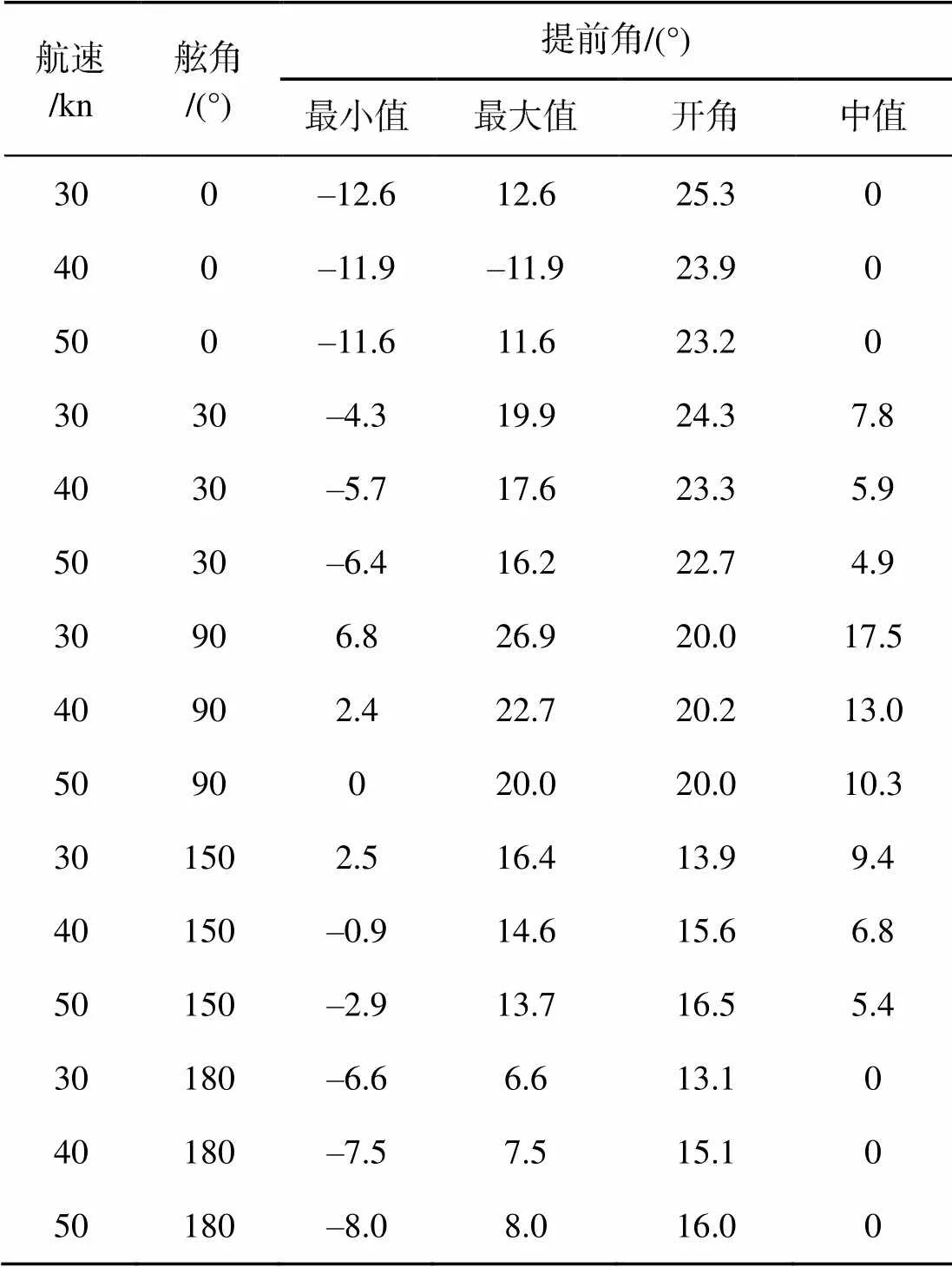
表1 声自导鱼雷攻击舷角、航速与搜索航路威胁区统计


图4 不同舷角鱼雷威胁区示意图
1) 正横来袭鱼雷, 提前角开角变化不大, 但是方向(以中值为方向)变化较大, 综合考虑不同航速, 开角合并后范围略有增大, 主要原因是鱼雷攻击方向变化引起。
2) 首部来袭鱼雷, 低速鱼雷接近时捕捉目标航行距离较近, 提前角开角最大, 航向无偏差, 综合考虑不同航速, 低速鱼雷开角范围覆盖高速鱼雷航向范围。
3) 尾部来袭鱼雷, 高速鱼雷接近时捕捉目标航行距离较近, 提前角开角最大, 航向无偏差, 综合考虑不同航速, 高速鱼雷开角范围覆盖低速鱼雷航向范围。
4) 大、小舷角来袭鱼雷, 综合考虑不同航速引起航向偏差, 高速鱼雷最小提前角和低速鱼雷最大提前角之间开角最大。
综合分析, 尾部来袭鱼雷搜索航路威胁区最小, 正横最大, 首部比正横略小。
3.2 鱼雷距离影响
仿真基本条件同3.1节, 图5为鱼雷来袭舷角分别为0、60、120和180°, 鱼雷距舰艇分别为3000、5000和7000 m时的鱼雷其搜索航路威胁区统计如所示。由于自导距离不同, 射击距离的比例不同, 射击提前角随着鱼雷射击距离增大而增大, 鱼雷搜索航路威胁区开角减小, 并且由于目标距离不同, 威胁区的起始基准点发生了变化, 按照估算法可以理解, 由于预计捕捉目标相遇点随距离增加趋向舰艇前方距离增加, 故不同距离上的鱼雷攻击时, 鱼雷搜索航路威胁区不同, 在空间上呈分布状态。

图5 不同舷角、不同距离下声自导鱼雷搜索航路威胁区
4 结束语
水面舰艇在接收到声呐报警并判断是声自导鱼雷后, 可以运用文中提出的迭代法和估算法分析计算来袭鱼雷的航路范围, 从而确定鱼雷的威胁区, 进而采取相应的措施对抗鱼雷, 保障自身安全。文中提出声自导鱼雷搜索航路威胁区的概念, 而且通过建模与分析, 给出了不同舷角、航速、距离下的鱼雷威胁区。相较于以往仅凭经验判断来袭鱼雷信息, 所提方法可缩小来袭鱼雷威胁区范围, 因此该方法可为水面舰艇防御来袭声自导鱼雷决策提供有力的目标要素分析手段, 解决实际作战问题。
[1] 陈颜辉. 水面舰艇综合防御鱼雷决策关键技术[J]. 火力与指挥控制, 2019, 44(6): 1030-1031. Chen Yan-hui. Key Technology Analysis on Surface Ship Defense Decision Against Torpedo Synthetically[J]. Fire Control & Command Control, 2019, 44(6): 1030-1031.
[2] 李源, 杨盛雷. 水面舰艇鱼雷防御武器系统[J]. 指挥控制与仿真, 2017, 39(3): 31-35.Li Yuan, Yang Sheng-lei. Surface Ship Anti-torpedo Weapon System[J]. Fire Control & Command Control, 2017, 39(3): 31-35.
[3] 赵正业. 潜艇火控原理[M]. 北京: 国防工业出版社, 2003.
[4] 陈敬军. 水面舰艇鱼雷防御系统中鱼雷报警综览[J]. 声学技术, 2013, 32(3): 257-262.Chen Jing-jun. Torpedo Warning Survey in Surface Ship Torpedo Defence Systems[J]. Technical Acoustics, 2013, 32(3): 257-262.
[5] 王改娣, 翁璐, 吕艳慧, 等. 鱼雷攻击体目标命中效果仿真方法[J]. 水下无人系统学报, 2019, 27(1): 78-82.Wang Gai-di, Weng Lu, Lü Yan-hui, et al. Simulation Method for Hitting Effect of Torpedo Attacking Body Target[J]. Journal of Unmanned Undersea System, 2019, 27(1): 78-82.
[6] 尹韶平, 刘瑞生. 鱼雷总体技术[M]. 北京: 国防工业出版社, 2011: 130-133.
[7] 陈敬军. 国外反舰鱼雷的现状与发展趋势[J]. 声学技术, 2013, 32(2): 164-170.Chen Jing-jun. The Status Quo and Development Trend of Overseas Anti-surface Ship Torpedo[J]. Technical Acoustics, 2013, 32(2): 164-170.
[8] 陈颜辉, 朱伟良, 杜毅. 潜射鱼雷弹道预测模型与仿真[J]. 海军工程大学学报, 2013, 25(2): 57-61.Chen Yan-hui, Zhu Wei-lang, Du Yi. Trajectory Prediction Model and Simulation of Sub-launched Torpedo[J]. Journal of Naval University of Engineering, 2013, 25(2): 57-61.
[9] 张宇文. 鱼雷弹道与弹道射击[M]. 西安: 西北工业大学出版社, 1999.
[10] 孟庆玉, 张静远, 宋保维. 鱼雷作战效能分析[M]. 北京: 国防工业出版社, 2003: 104-106.
[11] 陈道升, 郑晓庆, 梁朝阳, 等. 潜艇规避对声自导鱼雷命中概率的影响[J]. 测试技术学报, 2014, 28(5): 443- 448.Chen Dao-sheng, Zheng Xiao-qing, Liang Chao-yang, et al. Effect of Hit Probability of Submarine Evasion to Acoustic Homing Torpedo[J]. Journal of Test and Measurement Technology, 2014, 28(5): 443-448.
Analysis of Acoustic Homing Torpedo Searching Threat Area
ZHANG Xiang-tao1, KOU Zhu1, WANG Jia-jing1, SHI Zhi-jun2
(1. Underwater Weapons & Chemical Defense, Dalian Naval Academy, Dalian 116018, China; 2. 91184thUnit, The People’s Liberation Army of China, Qingdao 266071, China)
Against the background of acoustic homing torpedo attacks on surface ships, this study presents a definition of an acoustic homing torpedo searching the threat area, and then solves the threat range using an iteration method and an estimated method. From the perspective of surface ship defense, in the brief estimation of torpedo position and speed, the intuitively gives acoustic homing torpedo effective attack course range, to determine the threat area of torpedo, and provides a theoretical basis for torpedo defense decisions of surface ships. Compared to the experience estimate, the method in this study can effectively reduce the scope of the torpedo threat area, and embedding the algorithm in the ship fire control system can judge and display the threat area of the incoming torpedo in real time, increasing the efficiency of the surface ship undersea interception.
acoustic homing torpedo; surface ships; torpedo defense; threat area
TJ630.1; E843
A
2096-3920(2021)03-0344-06
10.11993/j.issn.2096-3920.2021.03.015
赵向涛, 寇祝, 王佳婧, 等. 声自导鱼雷搜索航路威胁区域分析[J]. 水下无人系统学报, 2021, 29(3): 344-349.
2020-07-29;
2020-08-18.
赵向涛(1969-), 男, 博士, 副教授, 主要研究方向为反潜攻防战术.
(责任编辑: 许 妍)