智能图书分类机器人模型研究与设计*
2021-07-12陈黄飞刘锐华陈彩艳
陈黄飞,刘锐华,陈彩艳
(广东工业大学 华立学院 机电工程学院,广州 增城 511325)
图书馆的藏书众多,即使是小型图书馆也会有上万种藏书,多则是百万种藏书,所以如何管理图书是一个图书馆的首要问题。图书馆每天的人流量非常多,无论是图书管理还是读者管理都具有非常大的压力,管理好图书馆需要对图书进行分类保护,也方便读者寻找书籍和文献。既然每天有很大的人流量,必然会有很多图书会被弄混,为了让明天的读者找到那些被弄混的书籍,图书管理员需要将它们进行归位,这将是一个非常大的工作量,这时图书分类机器人就有了存在的意义,它可以将那些被弄混的书籍进行识别,然后准确定位并将书籍放置到指定位置。为解决高校图书馆管理员过高的劳动强度和效率低下的问题,将智能机器人应用到高校图书馆的日常管理中已经成为当前图书馆研究的热门问题[1-2]。本文作者设计了一种六自由度的图书分类机器人,通过红外线扫描找到被弄混的书籍,然后放置在指定的位置。
1 智能机器人传动机构设计
为使控制传动部分简化,机械臂的转动采用蜗轮蜗杆传动,蜗轮蜗杆传动可使整个机械臂无死角360°旋转;还能通过与小齿轮触碰的计数器计数实现转动角度的精确控制,这对后续对书籍的精准摆放具有很大帮助;转动平稳,齿轮较大,可承受整个机械臂的重量。转动部分是机械臂多个自由度中较重要的部分,其设计过程也是整个设计过程中较重要的一环。
六轴智能机器人有6个轴,每个轴的传动都需要一台伺服电动机配备减速机,伺服电动机的选型尤为重要,六轴智能机器人的6个轴的运动方向及运动方式都不相同,每个轴就像是在模拟手的关节动作[3]。
1)一轴是连接底座的部位,主要是底座左右无死角旋转和承载整体的重量,左右无死角旋转的动作是使用伺服电动机配减速机传动的结果,每个轴都代替一个方向的运动方式。
2)二轴控制机器人主臂上下运动摆动、整个主臂前后摆动的功能。
3)三轴同样是控制机器人前后摆动功能,只是比二轴的摆臂范围小。
4)四轴是控制机器人上面的圆形管部分可自由旋转的部位,活动范围相当于人的小臂,不过不是360°旋转,跟人的小臂的范围相同。
5)五轴通常是当产品抓取后可以使产品翻转的动作,控制微调的上下翻转。
6)六轴可以360°旋转,是末端法兰部分旋转功能。
通过对智能机器人机械手六轴的设计,可自由方便地利用编程实现机械手的灵活运动,运动角度可达到任何一个角落,实现智能控制、精准分类的目的。智能图书分类机器人模型整体结构如图1所示。
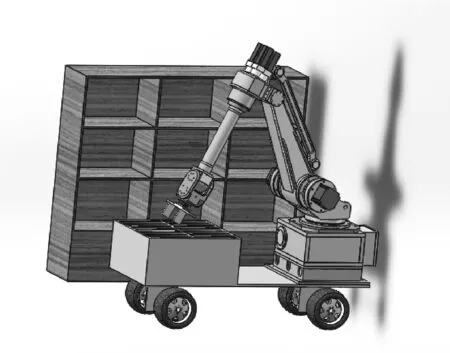
图1 机器人模型整体结构图
1.1 机械臂底座机构
机械臂底座机构如图2所示,主要由固定底座、底盘旋转涡轮、电动机等组成,六轴机器人的机械结构,6个伺服电动机直接通过减速器、同步带轮等驱动6个关节轴的旋转。固定底座与移动小车同步滑行,即底座固定在小车上,由小车载着机械臂行驶。电动机提供动力来源,本设计选定直流伺服电动机进行驱动。伺服电动机也称为舵机,此机械臂由多个舵机通过连接件将其连接成可以无死角360°旋转运动的结构装置,并在机械臂上装有红外模块,对抓取书籍也设计了相对应的机械爪,防止机械爪在抓取的过程中损坏书籍,机械臂固定在运动模块上装在小车上。这种机械设计运动灵活,操作简单[4-5]。

图2 机械臂底座机构
1.2 底盘驱动机构
底盘驱动机构如图3所示。底盘旋转电动机初步选定直流伺服电动机。底盘旋转电动机的负载为底盘旋转涡轮、大机械臂、连杆伺服电动机、旋转臂伺服电动机、机械爪、连杆机构和图书的质量之和。总质量≤85 kg,设底盘旋转涡轮摩擦因数为0.3,移动速度为0.3 m/s,则底盘旋转涡轮驱动力为:
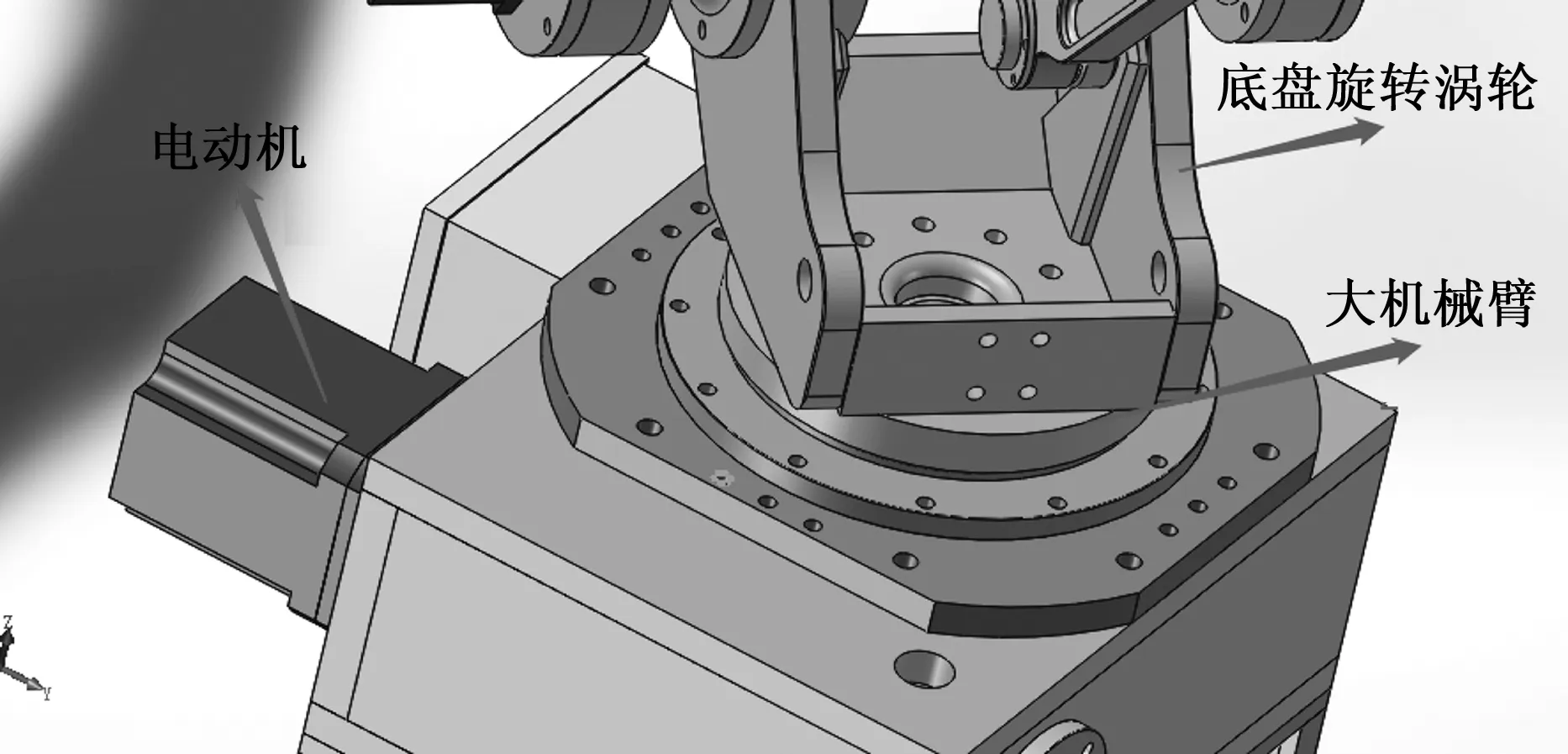
图3 底盘驱动机构图
F1=μmg=0.3×85×10=255 (N)
底盘旋转涡轮最大驱动率为:
P1=F1V=255×0.3=76.5 (W)
假定机械系统的传动效率为0.8,则电动机的最大功率为:
Pmax=P1/0.8=95.7 (W)
1.3 大机械臂驱动机构
大机械臂驱动机构如图4所示。连杆伺服电动机初步选定直流伺服电动机。连杆伺服电动机的负载为大机械臂、小机械臂伺服电动机、机械爪、连杆机构和图书的质量之和。总质量≤80 kg,设底盘旋转涡轮摩擦因数为0.3,移动速度为0.3 m/s,则底盘旋转涡轮驱动力为:

图4 大机械臂驱动机构图
F1=μmg=0.3×80×10=240 (N)
底盘旋转涡轮最大驱动率为:
P1=F1V=240×0.3=72 (W)
假定机械系统的传动效率为0.8,则电动机的最大功率为:
Pmax=P1/0.8=90 (W)
1.4 小机械臂驱动机构
小机械臂驱动机构如图5所示。旋转伺服电动机初步选定直流伺服电动机。旋转伺服电动机的负载为小机械臂伺服电动机、机械爪、图书的质量之和[6]。总质量≤40 kg,设底盘旋转涡轮摩擦因数为0.3,移动速度为0.3 m/s,则底盘旋转涡轮驱动力为:

图5 小机械臂驱动机构图
F1=μmg=0.3×40×10=120 (N)
底盘旋转涡轮最大驱动率为:
P1=F1V=120×0.3=36 (W)
假定机械系统的传动效率为0.8,则电动机的最大功率为:
Pmax=P1/0.8=45 (W)
综上可得各驱动机构的性能参数见表1。

表1 各驱动机构的性能参数
2 控制系统设计
在控制系统中,合理选择开发平台不但能够提高运算效率,还可以降低处理器的功耗。笔者选择的是VS Code开发环境,并采用C++编程语言,C++语言功能强大,也很适合用来控制机器的运转;选用K210处理器的开发板套件,该处理器性能不差,成本不高,功耗低,基本上是集大多数处理器优点于一身,很适合人工智能的开发,内置独立的CNN卷积神经网路运算单元,处理速度也比较快,主频最高可以达到600 MHz,并且自带麦克风、扬声器和摄像头[7]。
2.1 技术关键
图书智能分类机器人中,最重要的就是它的一双“眼睛”——视觉识别系统,这是机器人识别待分类书籍集中区的书籍的关键,通过识别系统识别到的数据,传送到机器爪的控制系统和小车移动的控制系统,以便能够准确地将书籍识别出来,将书籍分到不同的书架上。如何提高视觉识别系统的准确率是智能识别的关键,也是机器人完成图书分类的关键。
2.2 控制流程
图像识别的基本流程如图6所示。

图6 图像识别的基本流程
1)识别系统:首先让机器识别书籍或者书籍编码,然后对图像进行数据分析,并且确定获取所需要图像的数据的手段[8],通过图像预处理消除背景噪声、光照、小车运动造成的书籍编码模糊等实际应用影响,更好地提取有用的信息,最大限度地简化需要的数据;在读取图像后则是对书籍编码的提取,根据书籍上贴的编码进行提取[9-10],增加识别的精度;最后对书籍编码的信息进行处理和分析。该模型采用扫描编码法,首先机械臂运动到书籍堆放处,对书籍编码进行扫描,扫描的信息传送到系统处理器,就会得到书籍的所有信息。识别中的函数为:
void QZ() //对图像进行去噪处理
void ErZhiHua() //用二次定值法对图像进行二值化处理
void OnShibie() //对最后处理过的图像进行识别
2)小车运动系统:装载小车的运动是此机器人功能实现的关键之一,机械臂装载在小车上,当机械臂识别到书籍、确定书籍所在的书架、并将书架的位置信息传到小车的控制系统时,小车开始运动,此时,小车根据图书馆书架的位置图,迅速得出到达该书架的最近方案,在小车的行驶方向装一个红外传感器,使小车在移动过程中能避开障碍物[11]。
3)六轴机械爪运动系统[12]:刚开始采用固定运动模式,即机械爪在待处理书籍的箱子处进行扫描,直到扫描到待处理书籍的箱子有书籍为止,利用机械爪边缘的红外线扫描装置进行扫描,扫描书籍编码,把扫描到的信息传送给单片机处理器,处理器迅速得到书籍信息后,再与机械爪控制模块和装载小车的控制模块通信,使机器人能够抓取书籍按指定的位置移动,到达书籍的指定书架所在处,到达指定地点后,机械爪再次开始动作,把夹取的书籍放到指定书架上,机械爪复位。完成一类图书的分类整理,重新扫描,准备分类整理另一类图书,重复上述工作流程即可。具体控制流程如图7所示。
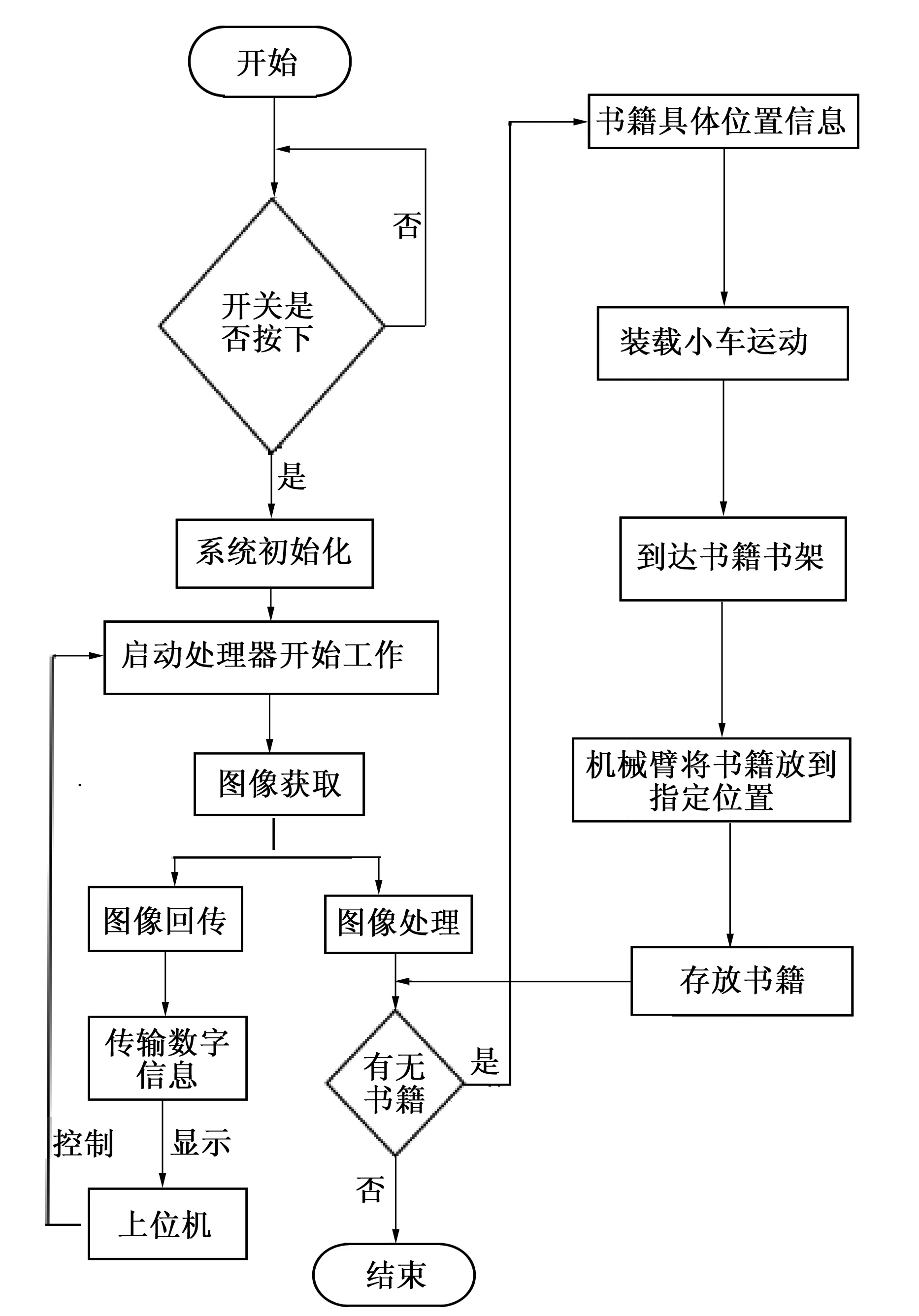
图7 系统控制流程图
3 结语
应用SolidWorks软件创建图书分类机器人模型,分析各结构的承载力及电动机参数,选取最佳材料来搭建图书分类机器人;应用ADAMS软件对图书分类机器人进行仿真调试。在此基础上对图书分类机器人进行可行性分析,满足现代图书馆的需求,从而减少图书管理员的工作量,同时也提高了对图书管理员的要求。设计的智能图书分类机器人系统模型成本低,操作简单,易于实现,可快速精准地进行图书分类整理,在实际生活中可广泛应用。
