一种基于距离-方位字典的仿生目标定位方法
2021-07-12杨长生李杭波胡丽萍梁红
杨长生, 李杭波, 胡丽萍, 梁红
(西北工业大学 航海学院, 陕西 西安 710072)
从“适者生存”的生物进化角度来看,蝙蝠的超声探测系统是最优的,它能够在杂乱无章的回声中分辨出猎物的具体位置,并具有惊人的抗干扰性。研究表明,大棕蝙蝠能够利用间距仅为1.4 cm的双耳达到1.5°的目标分辨率[1]。一直以来,众多科研人员致力于蝙蝠回声定位机理的研究。1993年,James A Simmons提出了谱相关及变换(SCAT)模型[2],但当目标个数多于3个时,该模型会失效。2012年,Buck使用时延波形字典提出了动物声呐压缩感知模型[3],但仅可进行距离估计。
本文提出了一种基于距离-方位联合字典的目标定位方法,利用仿生探测系统实现了小孔径高精度的目标定位,可同时估计出3个及以上的相邻目标的距离及方位信息。
1 回波信号的稀疏表达
1.1 距离-方位联合字典
设定字典D是M×N维的矩阵,其列向量dr称为字典的原子,则字典D={dr∈R,‖dr‖=1,1≤r≤N},考虑有限维空间中的一个信号x=[x1,x2,…,xM],x在某个字典D下可以表示为
x=Dα
(1)
式中:向量α为信号x在字典D下的稀疏表达系数;而α中仅存在K个元素的绝对值远大于0且K≪M,则称信号x是可稀疏的或者在字典D下是K-稀疏的,α称为稀疏向量。
在复杂环境下,引入稀疏性假设,即主动探测系统接收到的回波信号可表示为不同距离及方位上接收到的回波线性叠加[4],即

(2)
式中:回波时延ti=2ri/v;ri表示距离;v为声速;Aij表示回波的幅值;θj表示方位;s(ri,θj)表示距离ri,方位θj处的归一化回波。
利用不同距离及方位上接收到的目标回波构建距离-方位联合字典D,即
(3)
式中:L为阵元个数,N为方位个数;sl(i,θj)为第l个阵元(1≤l≤L)在距离r,方位θj处接收到的目标回波sl(r,θj)的第i个数据(1≤i≤n)。将不同阵元接收到的回波sl(r,θj)首尾相连并做归一化处理即为s(r,θj)。在每个方位θj下,通过将s(r,θj)前端补零来体现距离的变化,每补一个零代表距离往后延长c/fs(c为声速,fs为采样频率),当补k个零时,该列回波即为方位θj,距离(r+k×c/fs)处的目标回波。
由(1)式及(2)式可知,目标回波可表示为

(4)
式中:α为回波E(t)在字典D中的稀疏表达系数;而求解出的Aij即为α的元素;通过求解出的α可推出目标的距离和方位信息。
1.2 距离-方位联合字典的构建
研究表明,大棕蝙蝠回声定位信号[5]是由非线性的调频谐波信号组成,可以表示为

(5)
式中,fi(t)为基波或高次谐波信号。本文使用的仿生信号只包含基波和二次谐波信号,选择用双曲调频信号对大棕蝙蝠发射信号进行模拟,如图1所示。
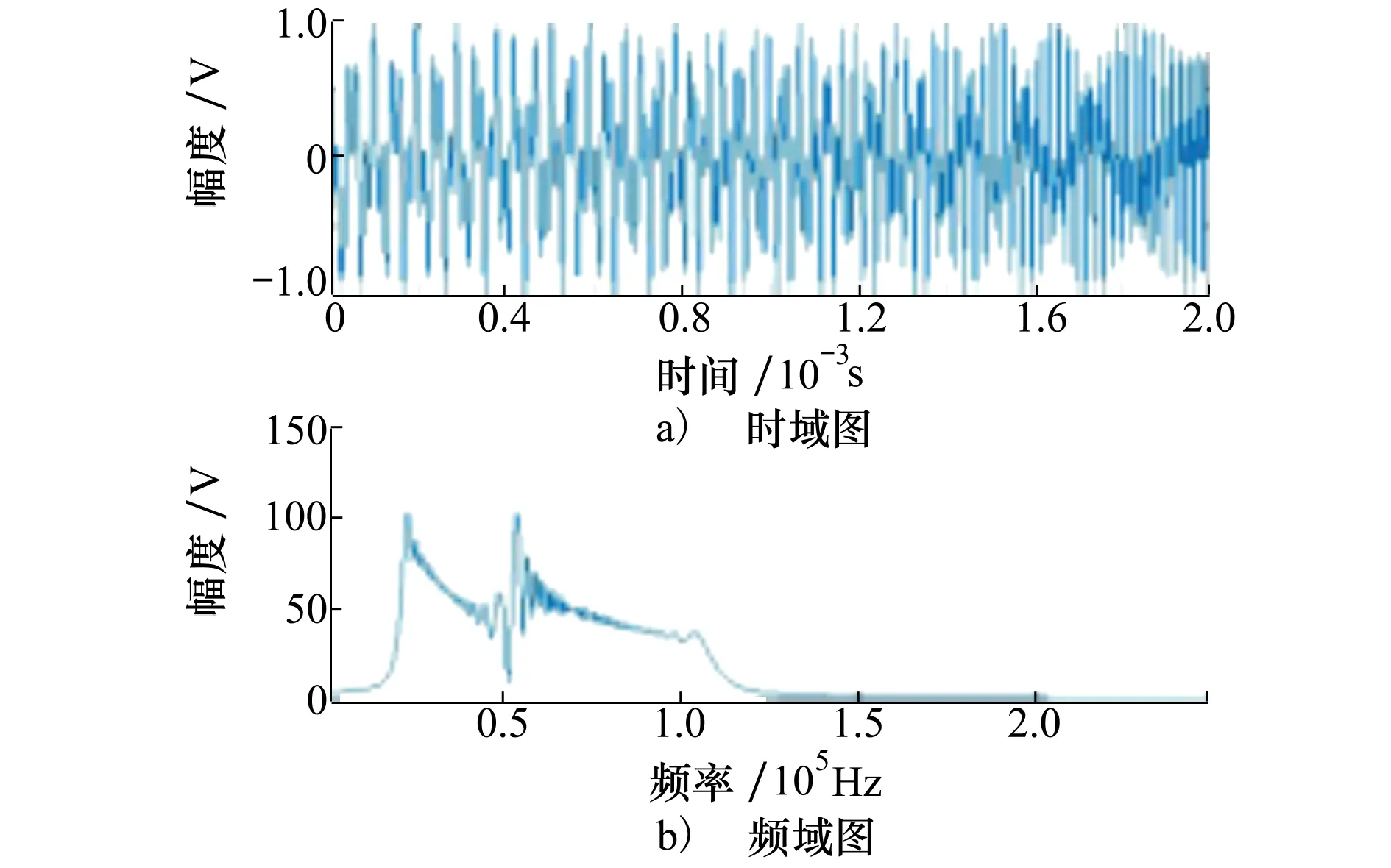
图1 仿生信号
稀疏随机阵列在阵元大量减少的前提下,仍能有效地避免出现栅瓣,同时还能保持主瓣宽度与满阵时基本相同[6],所以本文采用双稀疏随机阵列模仿蝙蝠双耳。但阵元数目大量减少会导致最大旁瓣级和平均旁瓣级的明显增高,因此选用遗传算法[7]对稀疏随机阵列进行优化。对于一个15×15的满阵,选用8个阵元组成稀疏随机阵列,遗传算法优化后的稀疏随机阵列如图2a)所示,同时,利用如图2b)所示的稀疏均匀阵列进行比较。

图2 阵列设计
1.3 字典的相干特性分析
在求解公式(4)所示的欠定方程组时,能否求出唯一的稀疏解,不仅仅取决于信号的稀疏度,还依赖于冗余字典中原子之间的相干特性[8]。字典相干特性可以用格拉姆矩阵G表示,即

(6)
式中,μij=|〈di,dj〉|表示字典中不同原子间内积的绝对值。
考虑到回波归一化,μ取值范围为0≤μ≤1。字典的相干特性最理想的情况是字典中所有原子都为两两正交,则i≠j时,μij=0,即格拉姆矩阵G为单位矩阵。
基于双稀疏随机阵列和双稀疏均匀阵列的水池实验数据,所构建的距离-方位联合字典的相干特性图,分别如图3和图4所示。可以看出,相比于基于双稀疏随机阵列的字典,基于双稀疏均匀阵列的字典相干特性主瓣更宽且旁瓣更高。

图3 双稀疏随机阵列

图4 双稀疏均匀阵列
2 距离-方位联合估计
2.1 算法描述
求解信号x在字典D中的稀疏表达系数α时,可以通过从所有可能的稀疏向量α中找到包含非零项最少的α来解决,即找到以下0-范数最小化问题的解
min‖α‖0subject tox=Dα,α≥0
(7)
式中,‖α‖0表示α中非零元素的个数。
研究表明,在适当的条件下,0-范数最小化问题可以重新描述为与原始问题具有相同唯一解的l1-范数最小化问题[9]
min‖α‖1subject tox=Dα,α≥0
(8)
为了更接近实际情况,在信号中加入高斯白噪声
x=Dα+η
(9)
因此上述问题可转化为

(10)
这是一个凸二次优化问题,可以使用特定的内点法来解决该问题,称为l1-范数最小化方法[10],求解出的α包含目标的距离及方位信息。式中,γ>0为正则化参数,它实现对数据拟合质量和原子向量稀疏度的平衡和折中,并直接影响着后文的目标参数估计效果。γ的取值范围为0<γ<γmax=‖DTx‖∞,并有经验公式[7]

(11)
式中:σ为噪声方差;p为字典的势。
γ值的选择与信噪比有关,在高信噪比条件下,γ值应当小,并且随着噪声的增加,γ值也应该相应地变大。
2.2 阵列对估计性能的影响
利用基于双稀疏随机阵列以及双稀疏均匀阵列所构建的距离-方位联合字典,分别在信噪比为-5 dB和-15 dB的条件下,完成(0°,2.394 4 m)处单个目标的距离-方位联合估计(c=146 0 m/s,采样频率fs=500 kHz,距离步长为10×c/fs=0.029 2 m,目标的距离为第83个距离,即82×0.029 2 m=2.394 4 m),结果如图5和图6所示,其中图5a)和图5b)的输出信噪比分别为25.2 dB和13.4 dB,图6a)和图6b)的输出信噪比分别为19.6 dB和3.8 dB。

图5 双稀疏随机阵列的距离-方位联合估计 图6 双稀疏均匀阵列的距离-方位联合估计
从图5及图6可知,信噪比降低,目标的距离-方位联合估计结果随之变差,表现为干扰逐渐增多,同时,在相同信噪比下,相比于双稀疏随机阵列,双稀疏均匀阵列的目标估计输出信噪比更低且噪声干扰更大,由此验证了双稀疏随机阵列的优越性。
2.3 抗噪性
为了验证字典的抗噪性,在信噪比范围为-25~-5 dB的条件下对单个目标做蒙特卡洛实验,均值和方差如图7所示。
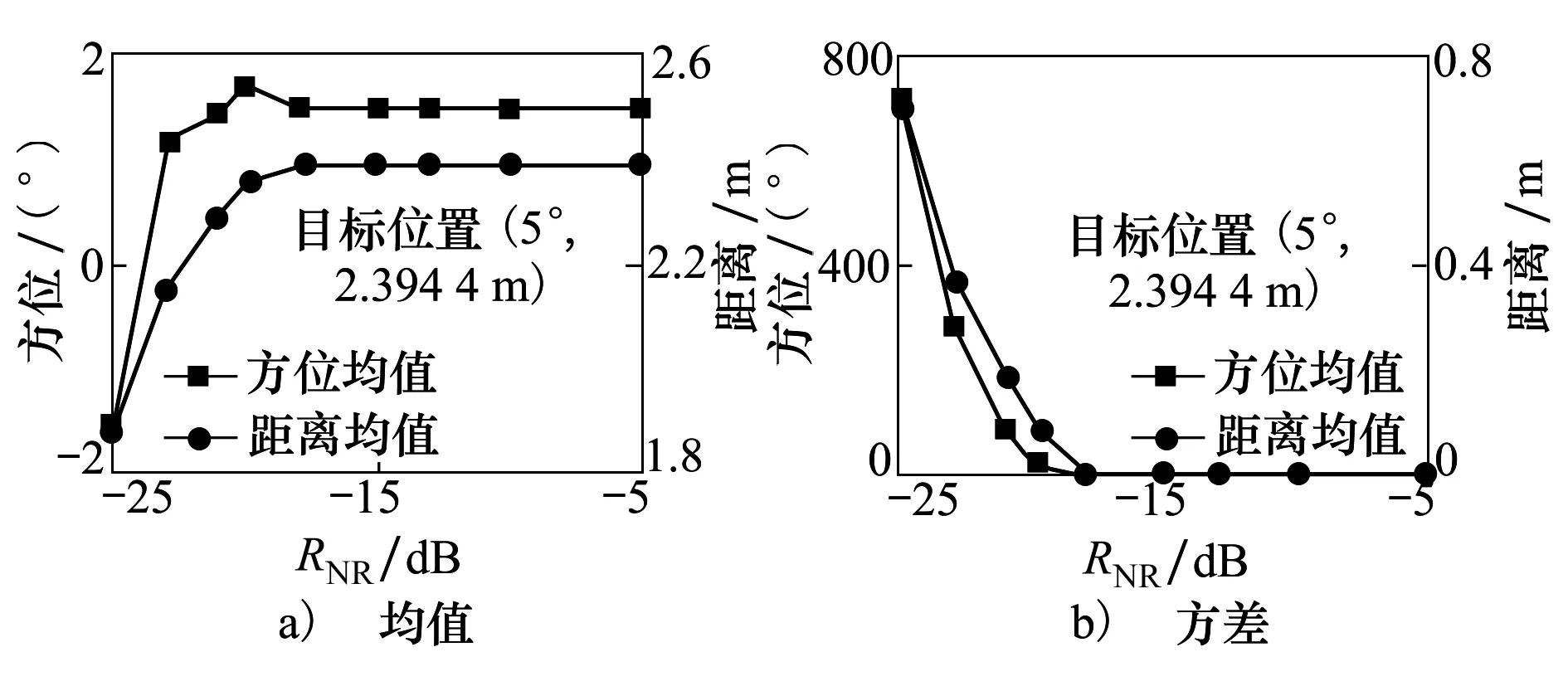
图7 不同信噪比下距离-方位联合估计
结果表明,在信噪比大于等于-18 dB时,距离和方位估计均值与真实目标位置一致,同时距离和方位估计的方差均为0。这说明双稀疏随机阵列的距离-方位联合字典可精确估计目标的距离和方位。
为验证字典方位遍历性,在信噪比为-10 dB及-15 dB的条件下,取方位范围为-30°~30°,步长为5°的目标进行距离-方位估计,结果如图8所示。可知,在低信噪比时,目标距离和方位估计的均值与真实位置一致,表明了该算法在所用方位上都具有较好的抗噪性,也验证了该字典的相干特性接近单位矩阵的优越性。

图8 不同角度下距离-方位联合估计
2.4 多目标估计
为了进一步验证字典的估计效果,在信噪比为-10 dB的条件下,用基于双稀疏随机阵的字典对多个目标进行距离-方位联合估计。假设3个目标均在中心左侧,中心右侧及中心处,估计结果如图9及表1所示。假设4个目标均在中心左侧,中心右侧及中心处,估计结果如图10及表2所示。
综合图9、图10、表1及表2可知,用水池实验数据构建的距离-方位联合字典在信噪比为-10 dB的情况下,能对相邻的3个目标及4个目标进行准确的距离-方位联合估计,体现出该算法的优越性。

图9 3个目标距离-方位联合估计 图10 4个目标距离-方位联合估计

表1 三目标距离-方位联合估计

表2 四目标距离-方位联合估计
3 结 论
借鉴蝙蝠的回声定位机制,本文用双稀疏随机阵模拟蝙蝠双耳接收,并使用仿生多谐波信号,提出了一种基于距离-方位字典的仿生目标定位方法。实验结果表明基于双稀疏随机阵列的距离-方位联合字典能够准确估计出目标的距离和方位信息,并具有较好的抗噪性和稳健性,同时,对于相邻的3个或4个目标,该方法也能进行准确的距离-方位联合估计。
