基于模糊PID算法的车身稳定控制策略与多工况联合仿真*
2021-07-11聂小博熊玥潘勇军
聂小博 熊玥 潘勇军
(重庆大学机械与运载工程学院,机械传动国家重点实验室,重庆 400044)
引言
制动防抱死系统(ABS)解决了车辆在制动时出现的轮胎抱死、方向盘不能转动等危险现象,提高了车辆制动时的稳定性[1,2];牵引力控制系统(TCS)改善了低附着路面车辆起步和加速时的车轮打滑现象,提高了车辆起步和加速时的稳定性[3,4].但是这两者不能直接保证车辆行驶时的侧向稳定性.而车身电子稳定系统(ESP)在ABS和TCS的基础上解决了车辆在驱动、制动转向、高速转向等极端工况环境下引起的侧向稳定性问题,使得汽车在各种工况下能够保持较好的稳定性.
有研究表明,未安装ESP系统的车辆,当车速在80-100 km/h之间时,40%的交通事故与汽车的侧滑有关;而车速达到160 km/h时,几乎所有的交通事故都是由于侧滑造成的.但在安装了ESP系统的车辆中,汽车的碰撞事故远远下降[5],可见ESP系统在提高车辆侧向稳定性中的重要性.
随着人们的安全意识不断加强,ESP系统几乎成了汽车上不可或缺的主动安全配置,并且控制算法也在不断改进,以满足更复杂的行驶工况和更高的稳定性要求,比如模糊控制以及自适应控制等[6-10].K.Jalali等[11]采用多准则遗传算法优化模糊主动转向控制器的参数以提高转向车辆的稳定性.D.Manhtuan等[12]采用鲁棒滑模控制算法提高车辆转向的稳定性.李果等[13]针对左右车轮垂直负载不平衡问题提出一种基于直接衡摆力矩控制策略的L2干扰抑制算法,并基于Carsim和Simulink联合仿真证明其跟踪性能和扰动干扰能力.陈无畏等[14]分析了不同路面附着系数对质心侧偏角安全边界的影响,并设计了一种能够适用于多种路面的质心侧偏角控制策略.高振海等[15]从快速实现驾驶员操纵意图角度出发,设计出多种单轮和多轮优选控制工况及其切换机制,提高了汽车稳定性控制系统对驾驶员意图改变时车辆的快速响应性能.王其东等[16]提出了一种基于汽车行驶安全边界的EPS和ESP协调控制策略,并采用基于带精英策略的非支配排序遗传算法对其优化,改善了汽车行驶的稳定性.
本文将利用Carsim建立整车动力学模型并联合Simulink进行车身稳定控制仿真分析,基于双移线工况、正弦工况和角阶跃工况对整车模型的质心侧偏角、侧向加速度和侧向位移进行控制.文章建立了用于车身稳定分析的PID算法和模糊PID算法的控制模型及具体实施方案,并基于三种行驶工况对所述控制算法进行了详细的比较.
1 仿真模型建立
1.1 基于Carsim的整车动力学建模
Carsim动力学建模软件结合了车辆动力学建模方法与多体系统动力学建模方法,将车辆系统进行抽象简化.主要包括车体部分、簧下质量部分(四个)、旋转车轮部分(四个)及发动机曲轴部分等十个刚体系统.传动系和制动系对车轮进行驱动和制动,转向系特性和悬架K&C特性综合控制车轮的转向,确定轮胎的运动量,进而利用轮胎模型计算轮胎力.在Carsim中设置的车辆整车模型的动力学仿真参数如表1所示.

表1 整车动力学参数Table 1 Parameters of vehicle dynamics model
1.2 线性二自由度参考模型
车辆二自由度模型虽然忽略了车辆转向系统和悬架等对车辆运动的影响,但因其包含了能描述车辆侧向运动的前后轴侧偏刚度和质量等参数,所以能够较理想地描述车辆的侧向运动和横摆运动.因此,车辆的线性二自由度模型是研究ESP较理想参考模型.车辆的线性二自由度参考模型如图1所示.由线性二自由度参考模型可得车辆动力学微分方程:

图1 线性二自由度模型Fig.1 Linear two-degree-of-freedom model
式中,β—质心侧偏角;
v—汽车横向车速;
δ—转向轮转角;
ωr—汽车横摆角速度.
根据式(1)可以得到稳态响应下车辆横摆角速度的期望值:



同样的分析方式,也可以得到侧偏角的期望值:

另外,车辆的期望质心侧偏角也需要小于其最大横摆角速度所产生的质心侧偏角.

故质心侧偏角的期望值可描述为:

根据公式(3)和(6),可在MATLAB/Simulink模块中建立车辆二自由度参考模型.
2 车身稳定控制算法
2.1 车身稳定控制的PID算法
在实际工程中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制.本文PID控制器输入值为汽车横摆加速度期望值与实际值之差eω,以及质心侧偏角期望值与实际值之差eβ,输出值为对应状态下所需要施加的附加横摆力矩.由此可以设计车身稳定控制的PID逻辑结构图如图2所示.

图2 PID控制器结构图Fig.2 PIDcontroller structurediagram
2.2 车身稳定控制的模糊PID控制器
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它是从行为上模仿人的模糊推理和决策过程的一种智能控制方法.其具有鲁棒性强、响应速度快、动态特性好等优点,而传统PID控制算法简单、调整方便、响应迅速,由此发展结合而成的模糊PID综合了两者的优点,并解决了传统PID控制对于非线性系统控制效果较差,依赖模型等缺点.较大地提高了系统的控制性能.本文所设计的模糊PID控制算法输入值为车横摆加速度期望值与实际值之差eω,质心侧偏角期望值与实际值之差eβ,以及两者的变化率ecω与ecβ.所设计的模糊PID控制系统中,参数e与ec的隶属度函数如图3所示,Kp,Ki,Kd的隶属度函数如图4所示,模糊控制规则表如表2所示,模糊PID控制器如图5所示.

表2 Kp、Ki、Kd模糊控制规则Table 2 Kp、Ki、Kd’s Fuzzy control rules

图3 e和ec隶属度函数Fig.3 Membership functionsof e and ec
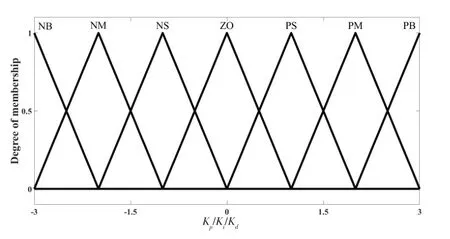
图4 Kp、Ki、Kd隶属度函数Fig.4 Kp、Ki、Kd’s membership function

图5 模糊PID控制器结构图Fig.5 Fuzzy PIDcontroller structurediagram
2.3 制动力分配控制器
ESP制动力分配有两种控制策略:一是控制单个车轮制动压力,二是控制两对角车轮制动压力.本文选取单轮制动方案,根据横摆角速度偏差Δω与方向盘转角δ来判断车辆的转向状态,从而控制不同车轮制动压力,维持车辆稳定行驶.控制规则如表3所示.

表3 制动车轮控制规则Table 3 Brake wheel control rules
附加横摆力矩与单侧车轮纵向力变化量有以下关系:

假设FX1与FX2为车辆左侧前后轮纵向力,且大小相等为Fd,则有:

由此可以求得单个车轮期望制动力Fd为:

其中,d为前后平均轮距.对于鼓式制动器而言,制动力矩Tb与轮缸压力Pw的关系为:

其中,re为车轮半径,C=Awub Rb,Aw为制动蹄面积,ub为制动蹄摩擦系数,Rb为制动器半径.因此可得到制动轮缸压力大小为:

3 控制仿真结果
3.1 双移线工况控制仿真
双移线工况下,车辆以恒定速度90 km/h行驶在附着系数为0.4的路面上.为了进行双移线工况实验,车辆分别采用无控制、PID控制及模糊PID控制进行动力学仿真,分析不同控制算法的仿真实验结果,得到如图所示仿真结果.

图6 双移线工况质心侧偏角曲线图Fig.6 Curveof sideslip angleof mass center in double-shifting condition
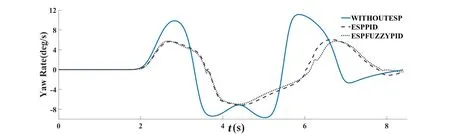
图7 双移线工况横摆角速度曲线图Fig.7 Curve of yaw rate in double-shifting condition
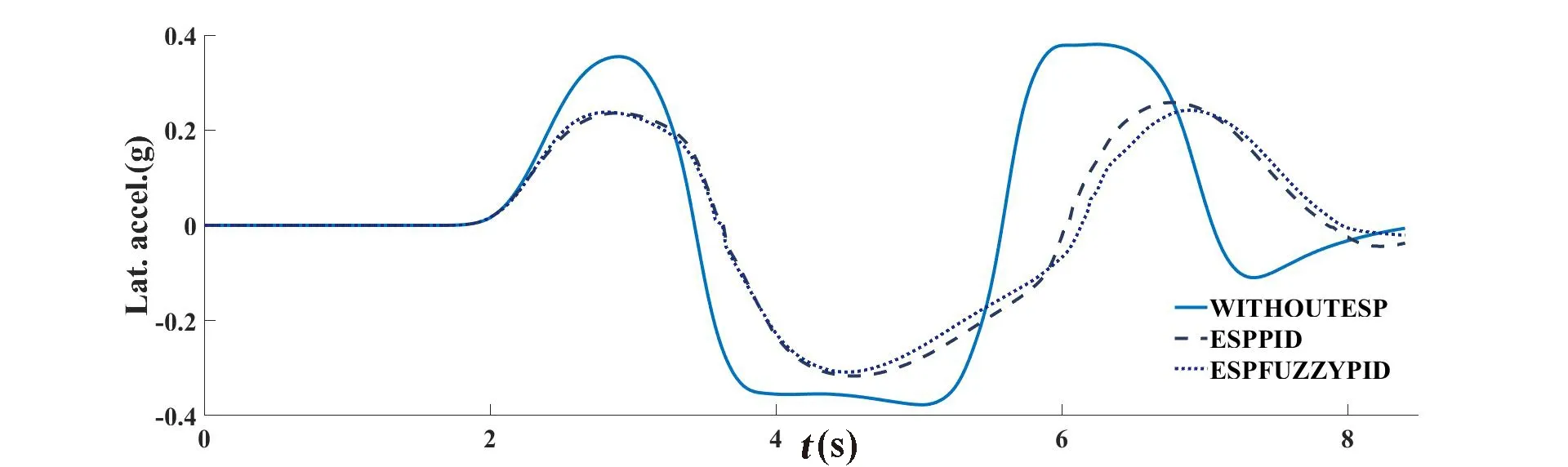
图8 双移线工况侧向加速度速度曲线图Fig.8 Curve of lateral acceleration velocity in double-shifting condition
由上图分析可知,在双移线工况下,施加ESP控制后,车辆行驶稳定性明显提高,且侧向位移较小.其中,模糊PID控制下的质心侧偏角、横摆角速度与侧向加速度均优于PID控制,其峰值数值分别减小0.05 deg,0.214 deg/s和0.08 m/s2.另外,在ESP控制下的车辆轨迹较无控制下略有滞后.
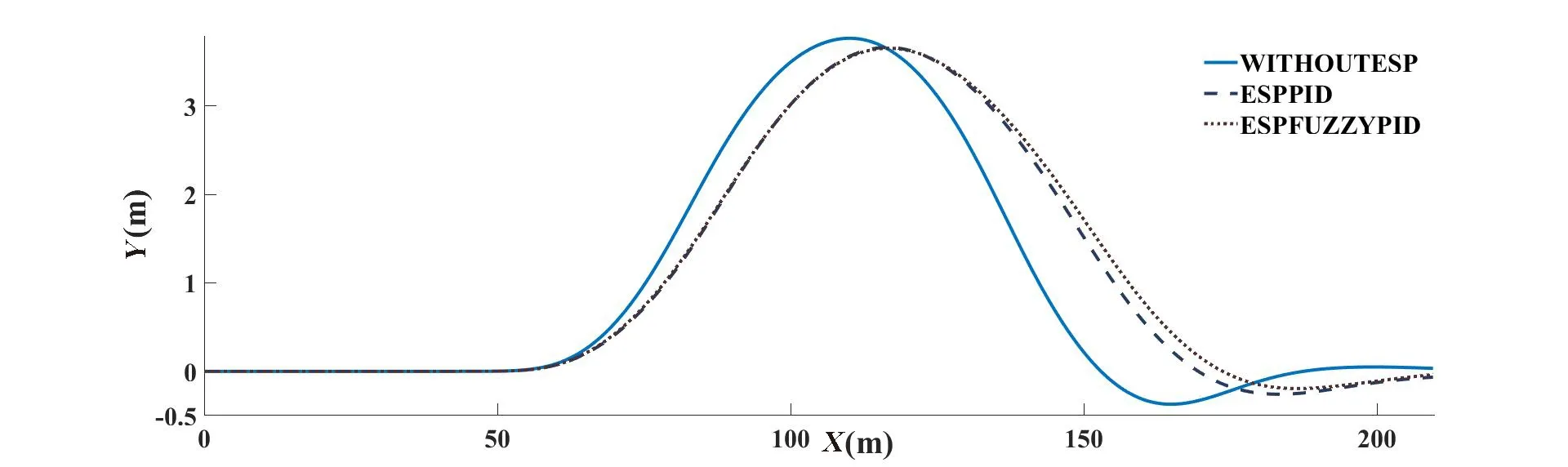
图9 双移线工况汽车行驶曲线图Fig.9 Curveof automobiledrivingin double-shiftingcondition
3.2 正弦工况控制仿真
在正弦工况下,车辆的方向盘转角设置以周期为5 s、峰值为1.5 rad的正弦输入.车辆同样在恒定速度为90 km/h,路面附着系数为0.4的路面上进行正弦工况实验,分析不同控制算法的仿真实验结果,最终得到如图10-图12所示PID控制和模糊PID控制仿真结果.

图10 正弦工况质心侧偏角曲线图Fig.10 Curve of sideslip angleof masscenter in sinecondition

图11 正弦工况横摆角速度曲线图Fig.11 Curveof yaw ratein sinecondition

图12 正弦工况侧向加速度曲线图Fig.12 Curveof lateral acceleration velocity in sinecondition
从仿真曲线图可以看出,在正弦工况下,相较于PID控制,模糊PID控制下的车辆质心侧偏角有了较大的改善.对于横摆角速度和侧向加速度而言,模糊PID控制下的曲线峰值均小于PID控制,其峰值数值分别减小0.64 deg,0.9 deg/s和0.3 m/s2,且模糊PID控制下的曲线更加平缓.由此可知,在正弦工况下,模糊PID控制能够更好地提升汽车行驶的稳定性.
3.3 角阶跃工况控制仿真
在角阶跃工况下,车辆方向盘转角中输入2 s到达的1.5 rad角阶跃信号.同样地,该实验也是在恒定速度90 km/h,路面附着系数为0.4的路面上进行的,以评价不同控制算法的仿真实验结果,最终得到如下图13-图15所示的仿真结果.

图13 角阶跃工况质心侧偏角曲线图Fig.13 Curveof sideslip angleof masscenter in angle-step condition

图14 角阶跃工况横摆角速度曲线图Fig.14 Curveof yaw ratein angle-step condition
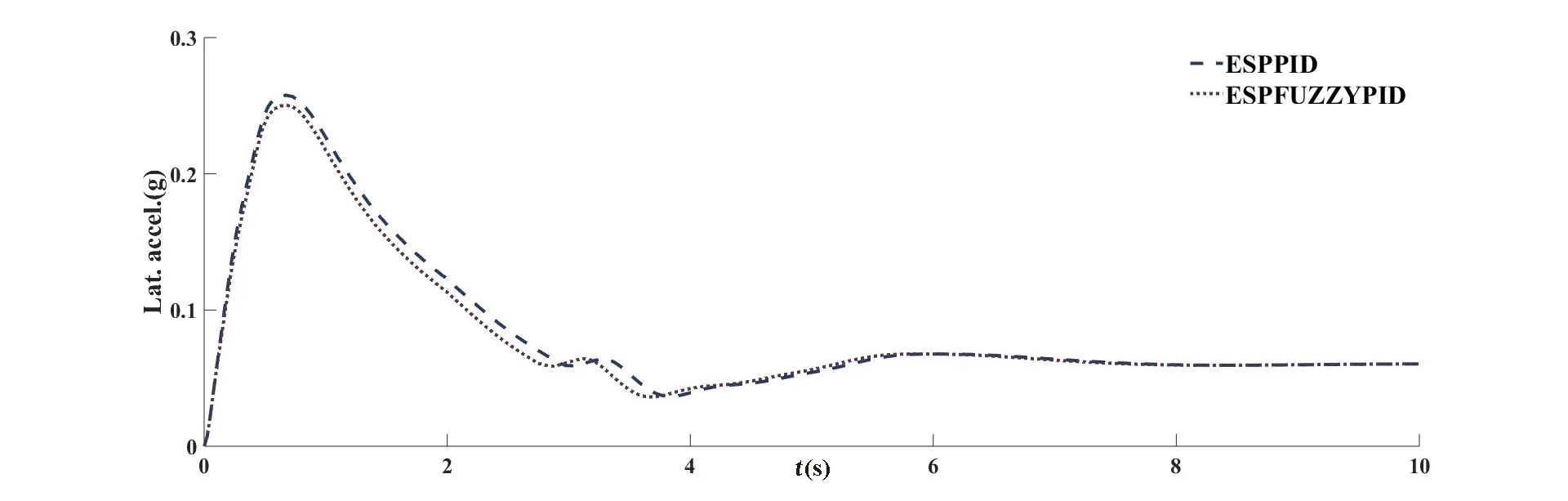
图15 角阶跃工况侧向加速度曲线图Fig.15 Curve of lateral acceleration velocity in angle-step condition
从上述曲线图可以看出,安装有ESP的车辆在模糊PID控制下的质心侧偏角、横摆角速度以及侧向加速度的表现都要优于PID控制,但其数值改进较小,峰值数值分别减小0.027 deg,0.14 deg/s和0.07 m/s2.因此,在角阶跃工况下,PID控制与模糊PID控制对车身稳定的控制效果基本相同.
4 结论
本文分析了影响车身稳定控制的因素,设定横摆角速度、质心侧偏角和侧向加速度为汽车稳定性控制的主要参数,并设计了用于车身稳定控制的PID控制逻辑和模糊PID控制逻辑.文章通过双移线工况、正弦工况和角阶跃工况对所设计的ESP控制系统进行了多工况仿真.结果表明,车辆以高速行驶在低附着系数路面上时,ESP系统对车辆行驶稳定性有了较大改善;而且以模糊PID为控制策略的ESP系统对车辆行驶稳定性提升更大.
