基于模糊PID算法的整车避撞控制多工况仿真*
2021-07-11何柳青杨春林潘勇军
何柳青 杨春林 潘勇军
(重庆大学机械与运载工程学院,机械传动国家重点实验室,重庆 400044)
引言
主动避撞系统一直以来都是国内外汽车主动安全领域的研究热点之一,其作用是在紧急情况下主动采取制动措施,避免汽车发生碰撞.行车安全距离模型的建立是汽车主动避撞系统功能实现的基础[1,2],它不仅可以实现主动避撞系统的功能、提高系统的有效性和实用性,而且还可以较好地控制车辆进入避撞阶段的时间以及停车间距,具有一定的自适应性和鲁棒性[3].
基于安全距离模型的整车避撞控制策略以速度为阈值划分为高速和低速安全距离[4],采用上下位分层控制器控制,并实现紧急避撞功能.目前国内外进行了相关的研究,并提出了几种经典的安全距离模型.Juan-Bautista Tomas-Gabarron等[5]采用自由度模型进行车头时距控制,获得了汽车自适应巡航控制所需的平滑响应和稳定性.Emilio Frazzoli等[6]针对静止和运动的障碍物,在概率路线的基础上提出了一种新的随机增量路劲规划算法.裴晓飞等[7]采用一种基于危险系数ε进行分级报警与主动制动的安全距离模型,有效地提高了避撞系统平台的实用性.胡远志等[8]利用已知车辆间的运动信息,以安全时距模型为基础,提出了一种新的碰撞时间(TTC)建模方法,设计了基于TTC和本车车速的主动避撞分级制动策略.侯德藻等[9]以驾驶员车间距保持目的为基础建立了一种新型汽车主动避撞安全距离模型,该模型考虑了驾驶员的驾驶特点,能够适用于多种工况.任玥等[10]针对自主驾驶车辆的转向避撞问题,提出了一种分层避撞控制方法.
目前,部分以自适应巡航控制系统(ACC)为主的汽车主动避撞系统缺乏对系统安全距离的合理设计,影响汽车进入紧急避撞的时间,进而导致避撞系统使用率降低[11].还有一些主动避撞系统采用神经元PID等控制策略,控制器系统较为复杂[12],控制效率较低.本文从汽车主动避撞系统对于安全距离模型的要求出发,设计了一种提高安全距离精度的时距模型,制定了避撞控制策略并完成了不同功能的上下位控制器设计.文章最后通过Carsim与Simulink联合仿真对所提出的主动避撞系统控制器的性能进行了验证.
1 安全距离模型建立
行车安全距离的确定是整车实现避撞功能的基础.车辆在实际行驶过程中,是否需要进行减速控制,所处状态是否安全,判断依据是基于行车安全距离模型产生的.目前应用较为广泛的安全距离模型有三种:基于车辆制动过程运动学分析的安全距离模型,基于车头时距的安全距离模型,以及基于驾驶员预瞄安全距离模型.其他行车安全距离模型可认为是在此基础上进行的拓展与细化.
本文采用的是一种综合模型,即在车辆高速行驶时采用基于车辆制动过程运动学分析的安全距离模型,在车辆低速行驶时,采用基于车头时距的安全距离模型.所采用的安全距离模型描述如下:

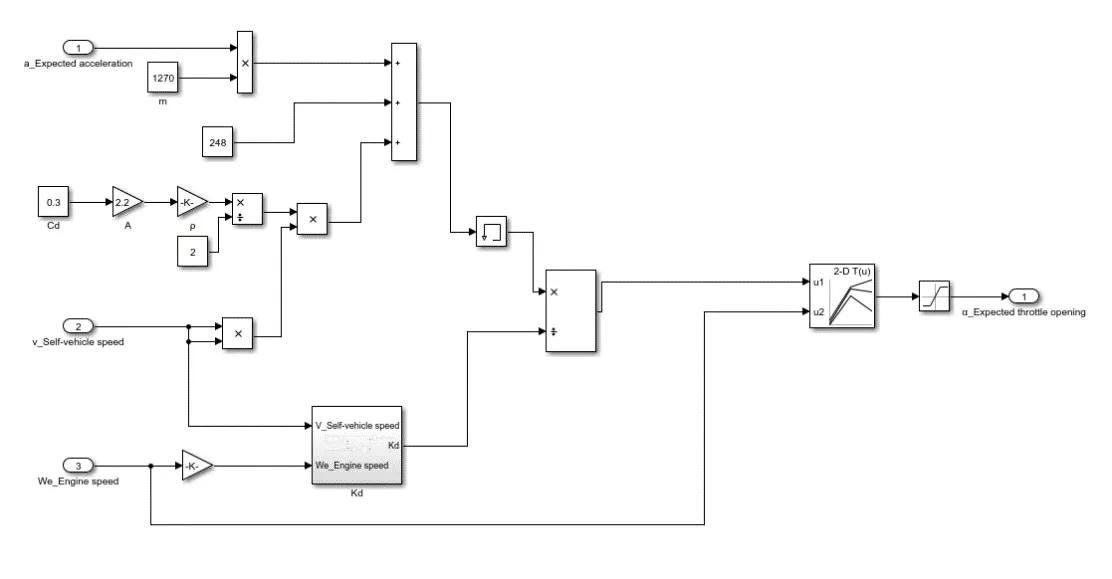
式中,v1,v2分别为自车与前车车速,td为驾驶员反应时间,th为车间时距,d1,d2为车辆停车后与前车的距离.根据文献资料,此处th取1.89s[13].td与驾驶员的驾龄,性别等多种因素有关.此处针对驾龄影响综合值、行驶车速、驾驶员反映时间,采用模糊控制的方法来进行确定.驾驶员不同驾龄对应的综合值如表1所示[14].根据表1,驾龄综合影响值论域设为[40 100],行驶车速论域为[60 120],驾驶员反应时间论域为[0.3 1.2],所采用的模糊规则如下表2所示.在之后的仿真过程中,统一采用4年驾龄人员数据.基于以上安全距离模型、驾龄综合影响和模糊规则,可建立整车避撞控制系统的整体框架图如图1所示.

表1 驾龄影响综合值Table 1 Comprehensive value of driving experience

表2 模糊规则Table 2 Fuzzy rules
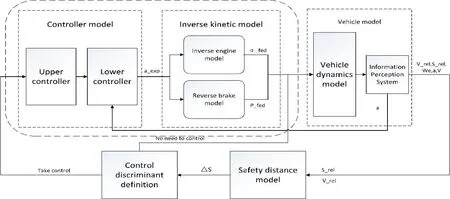
图1 整车避撞控制逻辑图Fig.1 Logic diagram of vehiclecollision avoidancecontrol
2 基于Carsim的整车动力学建模
建立准确的汽车动力学模型对于汽车整车避撞系统的设计与仿真都是至关重要的[15],为了后续控制系统的分析与应用,同时必须考虑车辆动力学模型的计算效率.文章基于Carsim构建车辆运动过程中的动力学模型,尽可能地贴合真实的车辆结构与动力学参数,然后将车辆动力学模型导入Matlab/Simulink架构中,与其中搭建的逆纵向动力学模型,安全车距模型,控制器模型等组成完整的在环仿真环境[16].
2.1 纵向动力学模型
Carsim软件的汽车动力学模型为27自由度模型.结合现代多体动力学理论,其中包含了汽车7大系统,即车身系统、制动系统、传动系统、转向系统、驱动系统、悬架系统及空气动力学系统.Carim软件将车辆抽象为10部分:车体部分(即簧载质量)、4个簧下质量部分(即非簧载质量)、4个旋转车轮部分及发动机部分,如图2所示[17].车辆模型的27个自由度分别为:3个簧载质量的移动自由度、3个簧载质量的转动自由度、4个非簧载质量自由度、4个车轮旋转自由度、1个传动系旋转自由度、8个轮胎瞬态特性自由度及4个制动压力自由度.
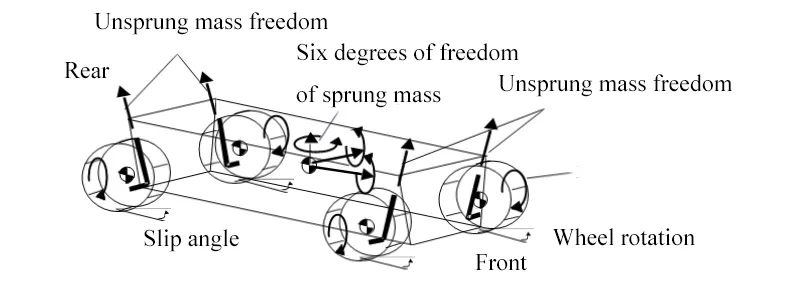
图2 模型简化示意图Fig.2 Schematic diagramof simplified mode
Carsim软件利用面向对象的参数化建模方法,通过确定汽车各部件的主要参数或动力学性能曲线来仿真近似.车辆系统各部件不同参数的选择对仿真结果会有一定的影响,如整车质量、迎风面积及路面参数等.这三个参数对后续模型的动力学响应有类似的同向影响,其值的大小会同向增大车辆模型中的期望制动压力与期望发动机转矩.迎风面积的影响占比也会随着车速的增加而逐渐增大;轮胎参数的选择主要体现在滚动半径的影响上,但其对整车影响并不太大[18].在整个仿真环境中,所建立的Carsim汽车动力学模型参数信息如表3所示.
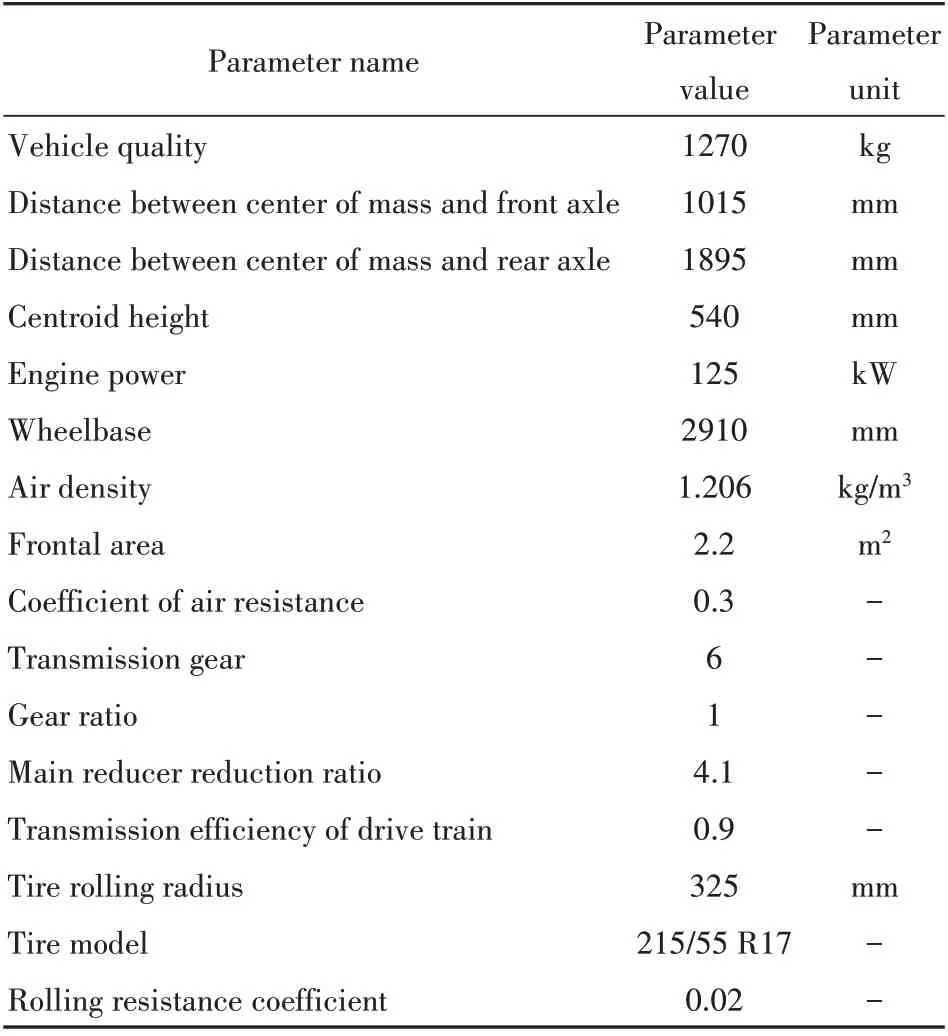
表3 整车动力学模型参数Table 3 Parameters of vehicle dynamics model
2.2 逆纵向动力学模型
2.2.1 制动力控制与节气门开度控制切换模型
车辆在实际行驶过程中,油门踏板与制动踏板是不会同时工作的,否则会对汽车造成损伤.在汽车需要减速时,如果所需制动减速度偏小,可利用发动机制动,空气阻力和路面阻力协助制动;如果所需制动减速度偏大,可利用制动器快速或紧急制动.因此,在两者之间需要设计一个切换逻辑模型,以控制其具体的制动模式.在行车过程中,还需要在节气门开度为零的最大减速度曲线附近设置缓冲区,以避免二者频繁切换.本文缓冲区的宽度设置为Δa=0.1,此时切换逻辑可表达为:
(1)a_exp>a+Δa时,采用节气门控制,关闭制动器.
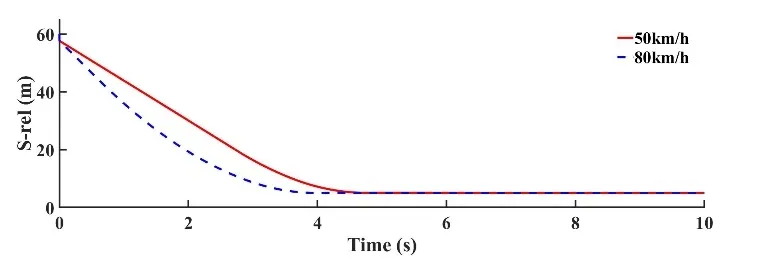
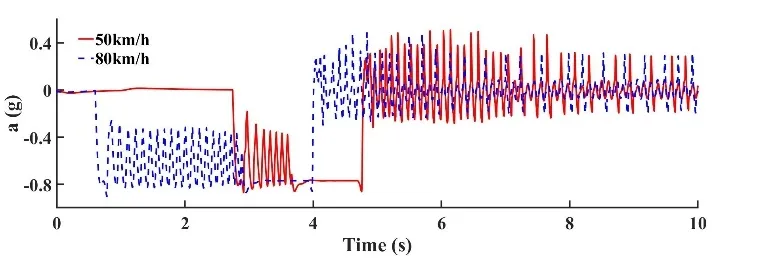
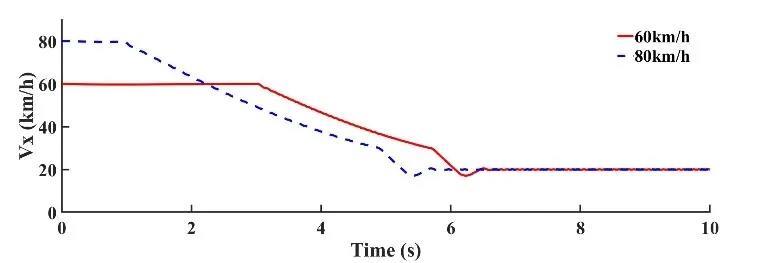
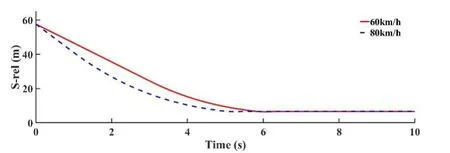
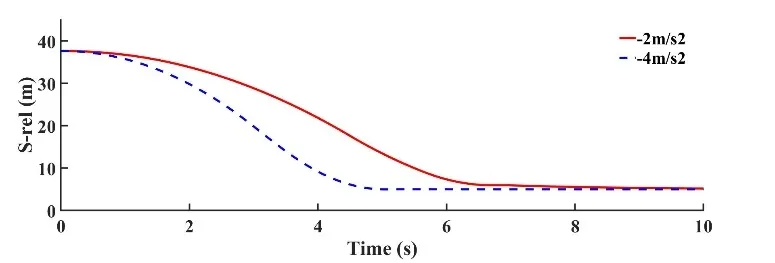
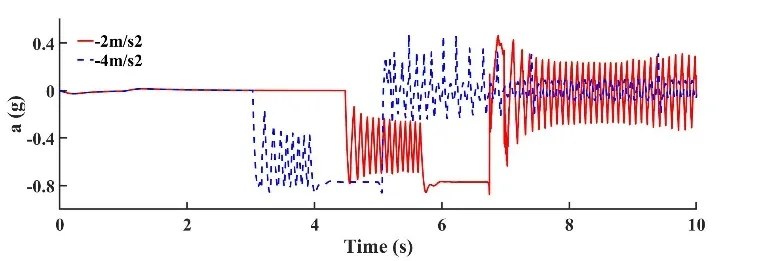
(2)a-△a (3)a_exp 具体的切换模型逻辑图如图3所示: 图3 制动力控制与节气门开度控制切换逻辑图Fig.3 Logic diagram of switchingbetween brakingforcecontrol and throttleopening control 2.2.2 逆发动机模型 如果汽车在良好水平路面上行驶,忽略坡度阻力,汽车行驶的动力学方程可以简单表示为: 式中,Ft为驱动力,Fxb为制动力.车辆行驶时,忽略传动过程中零部件的形变,驱动力Ft可表示为: 式中,Te为发动机的输出转矩,Ft为汽车的驱动力,we为发动机转速,wth为液力变矩器涡轮转速,Γ为液力变矩器的扭转特性函数.上式(3)中的Kd可以表示为: 此时,汽车为节气门控制减速,无制动器控制,所以Fxb=0.期望的发动机转矩Texp为: 可依据式(5)中的发动机转矩Texp得到对应的节气门开度. 所设计的逆发动机模型如图4所示: 图4 逆发动机模型Fig.4 Inverseenginemodel 2.2.3 逆制动器模型 当汽车所需减速度较大时,切换至制动器控制模式,此时节气门开度为零,发动机输出的转矩为零,即Ft=0,此时运动学方程可以描述为: 制动系统的制动主缸压力Pexp可表示为: 上式(8)中Kb为制动力与制动压力的比值.经过计算得到Kb=1230.8.依此所设计的逆制动器模型如图5所示. 控制器设计是整个避撞系统的核心,此处运用上下层分层控制器形式.上层控制器运用模糊控制方法,模糊控制技术是将人的经验具体化、模式化,根据阈值区间进行控制分类,使得系统可以识别,并采取具体措施的高级控制策略. 本文采用的模糊控制器,以自车与前车的相对车速V_rel和两车相对距离与安全车距的差值d为输入,得到相应的上层期望制动减速度a为输出.其中V_rel的论域设定为[-100 100],d的论域设定为[-40 40],两个输入变量采用7个模糊子集来描述,它们可描述为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB).输出量a的论域设置为[-10 3],采用5个模糊子集来描述,它们可表示为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正大(PB).具体控制逻辑如下: (1)当d值较大,即两车实际间距与安全间距之差较大,V_rel值较小时,车辆处于较安全状态,自车可以进行小幅加速或保持原速行驶. (2)当d值较小,即两车实际间距与安全间距之差较小,V_rel值较大时,汽车处于较危险状态,可以采用较大的制动减速度进行减速,以保证行驶安全. (3)当两者数值同大或同小时,车辆制动减速度可从小逐渐变大,以保证制动过程平稳进行. 具体模糊规则如表4所示:根据隶属度函数,模糊蕴含关系用Mamdani法则,解模糊采用重心法,因此利用d和△V可以求出加速度. 表4 上层控制器模糊规则表Table 4 Fuzzy rule table of upper controller 下层控制器采用PID控制器,PID控制器具有结构简单、使用广泛等优点,可以根据实际值与期望值之间的偏差对控制量进行实时反馈校正.控制器的输入为上层控制器的输出期望制动减速度a与实际的汽车制动减速度的差值,经过PID控制输出为最终的期望制动减速度a_exp.Kp、Ki、Kd三个参数可通过试凑法进行整定.所设计的控制器模型如图6所示: 图6 下层控制器模型Fig.6 Lower controller model 为验证整车主动避撞控制策略的有效性,现采用纵向制动避撞标准工况进行验证,即CCRs(前车静止)、CCRm(前车匀速)、CCRb(前车制动).使用Carsim与Simulink联合进行仿真,在Carsim中进行仿真路况的设置,选择路面附着系数为0.9,路面长度为1200 m. 在前车静止工况中,将前车车速设定为零,即前车静止不动,自车初始车速分别设定为50 km/h,80 km/h;初始距离设置为60 m以减少仿真时间.在自车距前车距离较远时,自车保持匀速行驶,系统不介入控制,当距离小于安全距离,有碰撞危险时,系统介入控制,自车进行制动.仿真结果如下图7-9所示: 图7 自车速度变化图Fig.7 The speed variation of thevehicle 图8 两车相对距离图Fig.8 Relativedistancebetween two vehicles 图9 自车加速度变化图Fig.9 Variation in acceleration of the vehicle 由上图可知,仿真开始时,自车与前车的间距较大,两车无碰撞危险,系统不介入控制,自车仍按原车速向前行驶.当前后车间距小于安全距离时,系统介入控制,自车进行减速,直至车速降低为0.仿真结果表明,在自车车速为60 km/h和80 km/h时,分别在4.7 s,4 s时速度降为零,制动减速度开始是在-6 m/s2波动,后随着两车间距逐渐变小,制动减速度加大至-8 m/s2左右,最后两车距离都能保持在5 m附近,符合测试标准,证明纵向制动控制避撞算法能够在前车静止情况下实现避撞功能,属于安全制动.另外,自车的初始速度越大,制动减速度也越大. 前车匀速行驶工况下,前车车速设置为20 km/h匀速行驶,自车初始车速分别设置为60 km/h和80 km/h,前后车初始距离设置为60 m.当系统检测两车无碰撞风险时,自车保持匀速行驶,无需制动控制.当系统检测到两车有碰撞危险时,避撞系统介入工作,自车以适当减速度进行减速,仿真控制结果如图10-12所示: 图10 自车速度变化图Fig.10 The speed variation of the vehicle 图11 两车相对距离图Fig.11 Relativedistancebetween twovehicles 图12 自车加速度变化图Fig.12 Variation in acceleration of thevehicle 由上图可知,在仿真开始时,两车间距较大,符合安全距离要求,此时,避撞控制系统不介入.当前后车间距小于安全距离时,系统介入控制,自车开始减速,当车速减到20 km/h时与前车车速相同,系统对车速进行稳定调节,自车加速度在0附近波动,使其平衡在20 km/h,由此保证与前车间距维持不变.仿真结果显示,在自车车速分别为60 km/h和80 km/h的情况下,车辆开始制动时,减速度在-4 m/s2处波动,并随着车速的降低减速度逐渐变小,且伴有短暂的-8 m/s2制动减速度,最后减速到两车车速相同时,两车间距分别为6.5 m和6.6 m,然后跟车行驶,符合制动测试标准要求,可以证明避撞控制系统能够在前车匀速行驶工况下,实现避撞效果,属于安全制动. 前车制动工况中,前车与自车初始车速均设定为50 km/h,初始距离设定为40 m,之后设定前车分别以-2 m/s2和-4 m/s2的减速度进行减速.自车开始时以50 km/h的车速匀速向前行驶,当避撞系统检测到两车有碰撞危险时,开始控制制动减速,仿真结果如图13-图15所示: 图13 自车速度变化图Fig.13 Thespeed variation of thevehicle 图14 两车相对距离图Fig.14 Relativedistancebetween twovehicles 图15 自车加速度变化图Fig.15 Variation in acceleration of the vehicle 由上图分析可知,开始时自车以50 km/h的车速向前行驶,前车分别以-2 m/s2,-4 m/s2的减速度进行减速,此时两车不断迫近,当前后车距离小于安全距离时,系统开始控制减速,由于两车车距较短,自车先后经历了-4 m/s2和-8 m/s2制动减速度,最后两车车速均减为0左右时,两车间距分别保持在5.1m和5m,可以实现避撞功能.仿真结果证明了整车避撞系统可以在前车制动的情况下,较好地实现避撞效果,符合安全制动要求. 本文基于安全距离模型,建立了纵向整车避撞控制系统,采用上下层分层模糊PID控制策略,设置了前车静止,前车匀速,前车制动的六种车速仿真工况,对控制系统进行仿真验证.结果表明,整车避撞系统能在检测到有碰撞危险的情况下,对自车进行避撞控制,最终在保证一定安全跟车距离的情况下安全停车或跟车行驶.所提出的整车避撞控制策略和方法可以较好地满足多种工况的整车避撞要求.本文基于27自由度车辆模型展开的整车避撞控制研究,对于更复杂的车辆动力学模型,如刚柔耦合的车辆多体动力学模型、有限元与动态子结构模型[19]等的研究则有待进一步深入.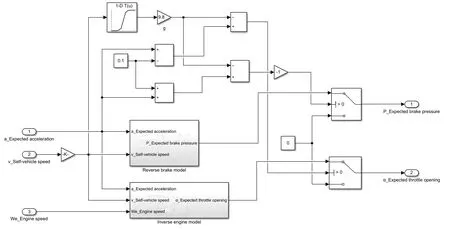







3 整车避撞控制的模糊PID算法
3.1 上层控制器

3.2 下层控制器

4 控制仿真结果
4.1 前车静止仿真工况

4.2 前车匀速行驶仿真工况

4.3 前车制动仿真工况

5 结论
