基于现代控制理论的飞机横航向控制律设计研究
2021-07-10刘诗超翁雪花邹俊俊冷国旗
刘诗超,翁雪花,邹俊俊,冷国旗
(1.海装驻南昌地区军事代表室,江西 南昌,330024;2.航空工业洪都,江西 南昌,330024)
0 引言
对于电传飞机而言,飞行控制系统相当于人类的大脑,是至关重要的,而控制律设计作为飞行控制系统中的关键技术之一,受到设计人员的高度重视。
目前在工程实践中使用的控制律设计方法,为调参法。控制律一般采用PID结构,参数设计采用极点配置方法、根轨迹分析法等较为经典的方法。随着新型飞行器的不断出现,控制律设计所面临的挑战不断增加,现代控制理论和方法的应用研究越来越受到关注和重视。
本文研究几个具有工程应用前景的控制方法:线性二次型最优控制方法、特征结构配置方法和动态逆方法。
1 控制律设计
本文以某型教练机5km、0.3M状态点为例,应用线性二次型最优控制方法、特征结构配置方法及动态逆方法对飞机横航向控制律设计进行研究。
1.1 线性二次型最优控制方法
线性二次型最优控制方法的研究始于20世纪60年代,是一种最优控制系统设计方法。该方法以线性系统为对象,取状态变量和控制变量的二次型函数的积分作为性能指标函数,寻找状态线性反馈控制律,使得性能指标函数最优。该方法能生成一个简单的状态反馈控制律,易于计算和工程实现。
1.1.1 方法描述
对于系统

其中,x为n维状态向量;u为r维输入向量,y为m维输出向量;A为n×n维的常数矩阵、B为n×r维的常数矩阵、C为m×n维的常数矩阵、D为m×r维的常数矩阵。
其状态反馈控制律为

假设能控且可观的线性定常系统,设计最优控制律u(t),使得性能指标J取极小值:

其中,Q为n×n维半正定的状态加权矩阵、R为r×r维正定的控制加权矩阵,常选为对角线矩阵。
根据线性最优控制理论,使得J取极小值的控制律u(t)存在且唯一地由式(4)确定:

式中,P为对称矩阵,且满足黎卡提(Riccati)方程:

则控制系统的全状态反馈增益K计算如下:

1.1.2 设计
针对飞机横航向控制律的设计,选取状态变量x=[βωxωyγ],n=4,控制输入为u=[δxδy],得到相对应的飞机状态空间表达式。
首先验证系统的能控能观性。
对多输入系统,其能控的充分必要条件是能控性矩阵

的秩为n。
其能观的充分必要条件是能观性矩阵
的秩为n。
通过上述判据,验证0503状态点的状态方程具有能控能观性,满足设计前提。
其次,要选取合适的加权矩阵Q和R。
Q和R是状态向量和输入向量的加权矩阵,两者取值与系统的性能相关,通过反复取值计算仿真,观察仿真结果,综合考虑系统动态性能指标,选取Q、R矩阵如下:
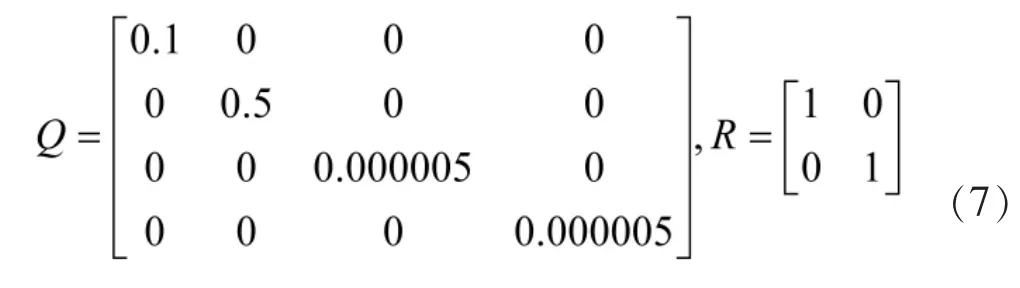
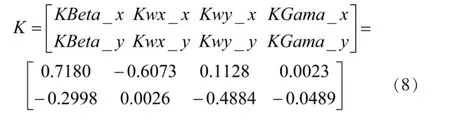
再由A、B、Q、R求解黎卡提矩阵微分方程,得到黎卡提矩阵P,由P求得反馈增益矩阵K。这里利用MATLAB工具箱提供的lqr()函数,调用格式为K=lqr(A,B,Q,R),可得到反馈矩阵K如下:
1.2 特征结构配置方法
特征结构配置方法是20世纪60年代发展起来的一种基于时间域的多变量系统设计方法。该方法根据要求选择适当的特征值和特征向量,使系统达到期望的动态响应特性,类似于经典控制理论中的零极点配置。在特征结构配置技术中,特征值用于闭环系统的稳定,特征向量用于动态响应的解耦,两者一起保证系统的动态性能。
1.2.1 方法描述
对于系统式(1),其状态反馈控制律为

则有

其中,K∈Rr×n、G∈Rn×n。若G具有n个互异特征值λi,i=1,2,K,n,对应的特征向量为vi,则有

特征结构配置方法即是寻找K,使得G即(A+BK)含有规定的特征值和特征向量。
1.2.2 设计
首先选择期望的特征值和特征向量。
依据GJB 185-86一级标准,选择荷兰滚特征根为-2.5±2.5i,对应的荷兰滚阻尼比为0.7071,荷兰滚频率为3.5355,滚转模态特征根为-3,对应的滚转模态时间常数为0.33,螺旋特征根为-0.002,对应的螺旋模态倍幅时间为500,则期望的特征值:
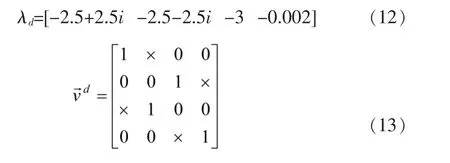
其中“×”表示未受约束(即任意的)项,而所有其他值(包括“0”)表示严格的特征向量约束。

由于矩阵B的秩为r(r=2),小于n,引入线性变换T,使得B变换后的秩为n,则

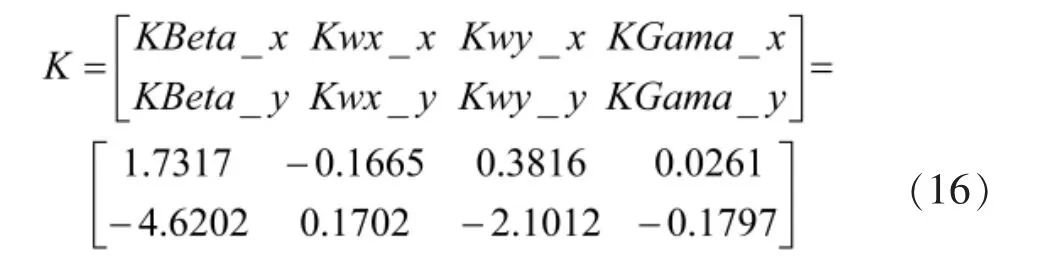
综上,通过计算,可得到基于特征结构配置的反馈矩阵K为
1.3 动态逆方法
动态逆方法又被称为“反馈线性法”,始于20世纪70、80年代,是建立在逆系统理论基础上的一种方法,其实质是用期望的动态环节,通过代数运算,替代原系统中存在的不符合期望的动态环节,使系统输出为期望的动态环节。
1.3.1 方法描述
假设有非线性系统

其中x是状态向量,u是控制向量。
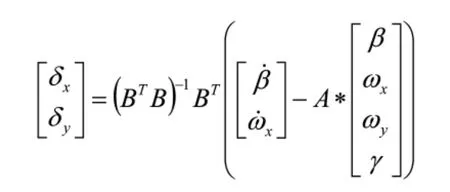
假设g(x)可逆,则通过求逆,当控制律为

1.3.2 设计
根据横航向控制的目的,选择的控制变量为β和ωx,则飞机方程简化为
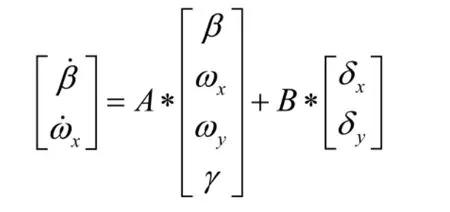
其中,A为4×4维常数矩阵,B为4×2维常数矩阵,则
一般希望飞机响应为一阶惯性环节,因此这里构造期望的动态特性为
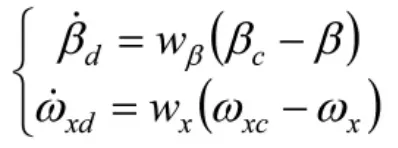
其中,βc和ωc为侧滑角和滚转角速率指令。
根据时标分离原则及快慢回路间带宽的选择要求,其带宽设计为wβ=2rad/s,wx=10rad/s,则有
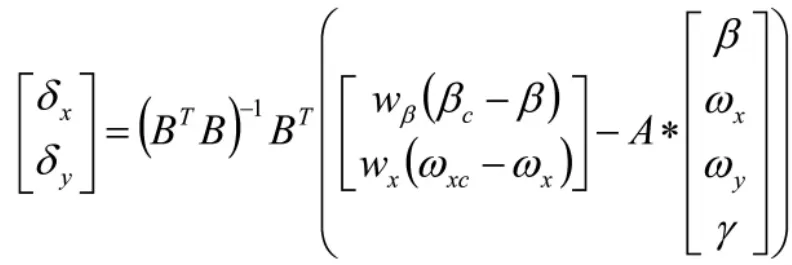
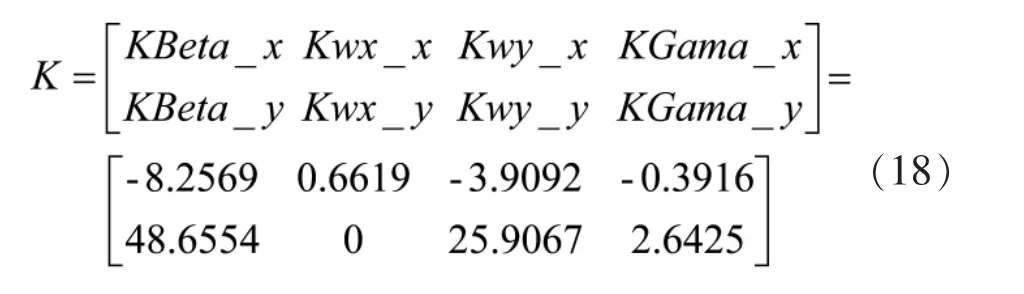
通过计算,可得基于动态逆方法的反馈控制律为
2 仿真分析
基于上述方法得到的控制律,在MATLAB Simulink下搭建模型,该模型包括控制系统、作动器和飞机方程,框图如图1所示。
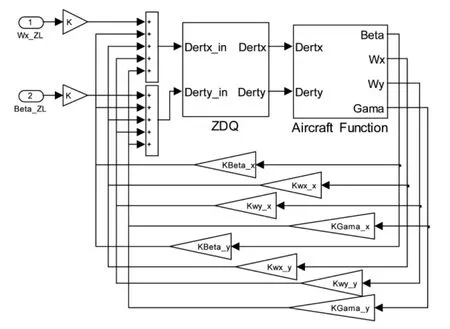
图1 仿真模型示意图
分别给出10°/s的滚转角速率指令和1°的侧滑角指令,三种方法仿真结果如图2、图3所示。
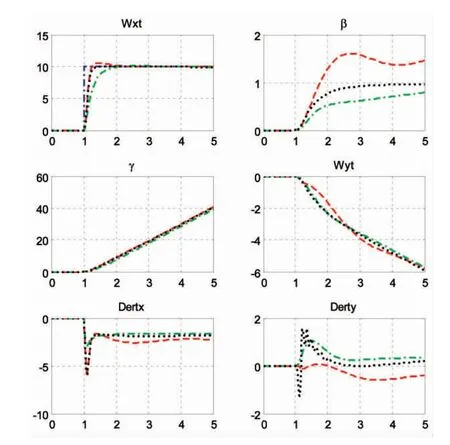
图2 横向仿真结果对比
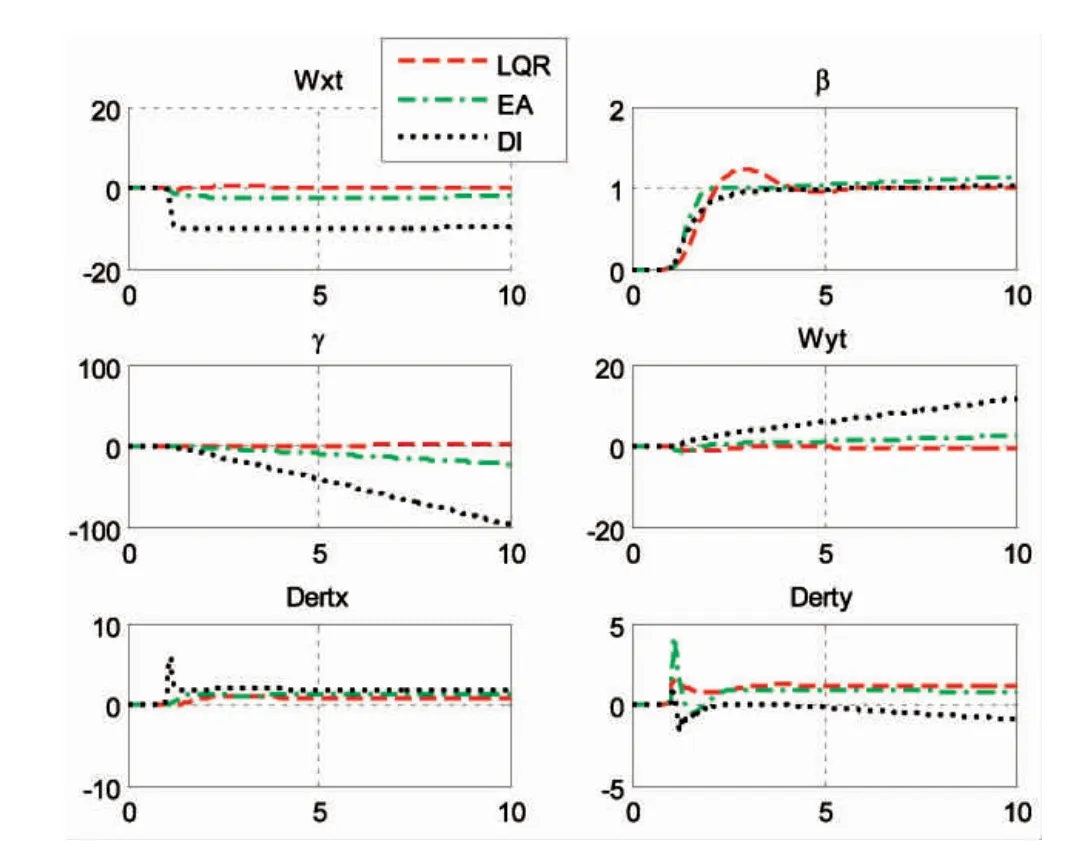
图3 航向仿真结果对比
由上述对比结果可知,当给定10°/s滚转角速率指令时,最优控制方法和动态逆方法的响应速度较特征结构配置的快,但最优控制方法存在超调,而另两种方法均能平滑跟踪指令,三者的稳态误差均几乎为零,特征结构配置方法的横航向解耦效果最优;当给定1°侧滑角指令时,三种方法的响应速度相当,最优控制方法存在超调,动态逆方法给定侧滑角同时产生的滚转角速率较大,解耦效果较前两者差。
设置20%的飞机模型扰动,给出10°/s的滚转角速率指令和1°的侧滑角指令,三种方法仿真结果如图4、图5所示。
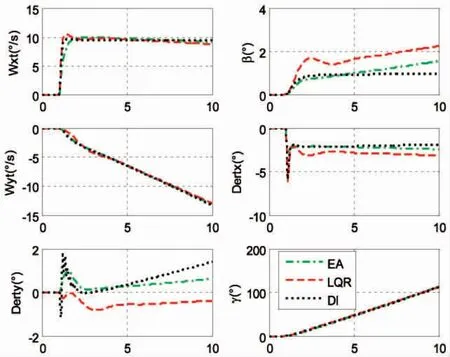
图4 横向仿真结果对比(带扰动)
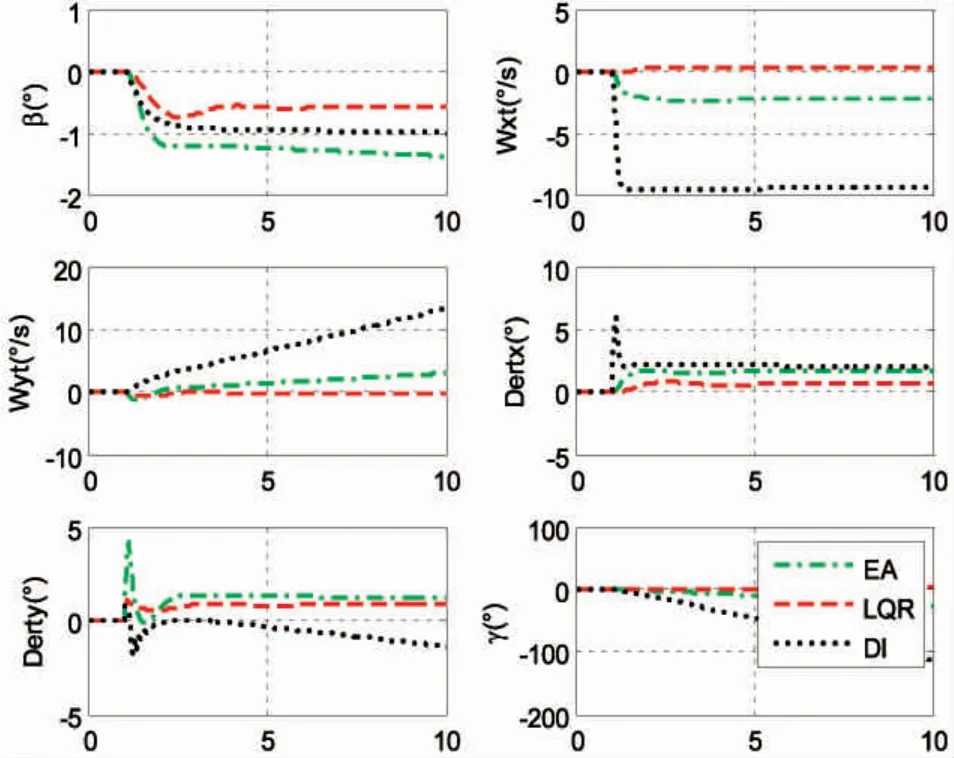
图5 航向仿真结果对比(带扰动)
扰动时,给定10°/s滚转角速率指令时,三种方法都能很好地跟踪指令,最优控制方法略微超调,三者的稳态误差均几乎为零;给定1°侧滑指令时,特征结构配置方法和最优控制方法的侧滑角存在稳态误差。由此可知,三种方法的抗扰动能力相当。
3 结语
本文研究基于现代控制理论方法的飞机横航向控制律设计,其中运用具有工程意义的线性二次型最优控制方法、特征结构配置方法和动态逆方法,以某型教练机5km、0.3M状态点为例,进行横航向控制律设计,搭建Simulink模型,仿真分析并验证。通过仿真结果可知,线性二次型最优控制方法,响应速度快,但存在一定的超调;特征结构配置方法能够平滑较快地跟踪指令,且稳态误差几乎为零,较好地实现了横航向解耦;动态逆方法能够平滑较快地跟踪指令,且稳态误差几乎为零,其给定横向指令时,能够较好地实现横航向解耦,但当给定航向指令时,横航向解耦效果较差。
综上,线性二次型最优控制方法设计过程最为简单,MATLAB中有函数工具,可直接得到反馈控制律,但其最关键的问题是性能指标中Q和R的选择,Q和R的值并没有理论依据,设计过程中需要不断试凑,观察仿真结果来调节Q和R,直至达到期望的仿真结果。
特征结构配置方法的计算过程比较复杂,尤其还涉及复根,选择不同的特征根和特征向量得到的反馈控制律也不同,后期飞行品质计算结果也会受影响,可根据飞行品质计算结果适当调节特征根,使得其动态特性和品质都符合要求。
状态反馈动态逆方法得到的反馈增益偏大,对飞机稳定性影响较大,后期要根据稳定储备的计算加以修正。
较经典理论而言,基于现代控制理论的全状态反馈方法能够一次性求出反馈系数,后续可根据相关飞行品质计算调整个别参数,缩短了控制律设计的时间,提高了效率。
