某型飞机燃油计算软件算法研究
2021-07-10谢艳娇陈雄昕韩亦俍
谢艳娇,黄 华,陈雄昕,韩亦俍
(航空工业洪都,江西 南昌,330024)
0 引言
1 某型飞机油量测量系统简介
油量是飞机重要的基础信息。飞机在空中飞行时,剩余油量将直接影响飞行安全及任务完成,因此飞行员需要准确知道油箱内的燃油量信息。本文以某型飞机为例,提出了油箱油量信息解算方法,根据该型飞机油箱的几何特征、油量传感器分布情况及飞机过载信息,解算出油箱内的油量值。
某型飞机一共有4个油箱,分别布置于左、右机翼内,见图1。

图1 某型飞机油箱分布
某型飞机燃油测量系统由4根油量传感器、信号转换盒和燃油计算模块组成,其中,燃油计算模块集成在飞行参数采集器中。油量传感器分别安装于4个油箱内,实时输出一个电容信号,该电容信号可依据油面高度变化而改变;信号转换盒将油量传感器的电容信号转换为油面高度信号,并输送给飞行参数采集器;飞行参数采集器将实时存储各油箱的油面高度数据;燃油计算模块将各油箱的油面高度数据转换成各油箱油量并计算出全机油量,输出给飞行参数采集器和多功能显示器,以存储和显示各油箱油量数据和全机油量数据。
2 某型飞机燃油测量计算软件工作原理
燃油计算软件安装在飞行参数采集器的燃油计算模块中,属于实时任务程序,通过硬件驱动程序和实时多任务操作系统对信号转换盒输出的各油箱油面高度数据进行处理和判断,解算出飞机4个油箱的实时油量、总油量及故障信息。燃油测量计算软件工作原理见图2。
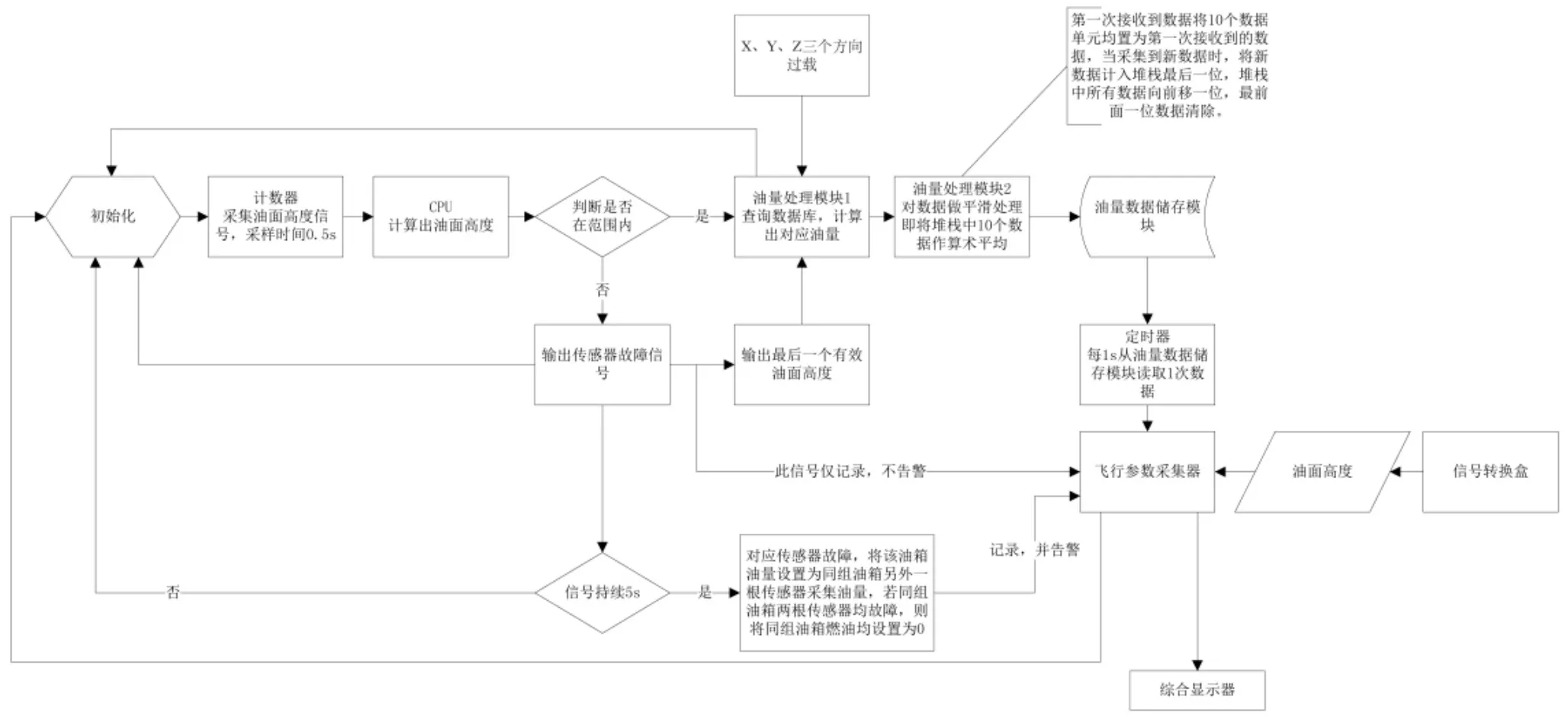
图2 燃油测量计算软件工作原理图
燃油测量计算软件的工作原理为:依据信号转换盒输出的油面高度和油面角数据,查询表征油面高度、油面角与燃油量、燃油重心等对应关系的燃油质量特性数据库,经差值解算和信息后处理得到油箱油量数据。燃油测量计算软件的输入和输出参数如表1所示:

表1 燃油测量计算软件的输入和输出参数
3 软件算法
3.1 燃油量计算
3.1.1 油面高度
每个油箱的油量传感器需对零油量和满油量位置进行标定,称为“调零”和“调满”。综合显示器上设置相关按钮,可以对每根油量传感器进行调零调满。飞机调零和调满时需将当前数据进行存储,用于油量计算;再次调零和调满时将覆盖原数据。
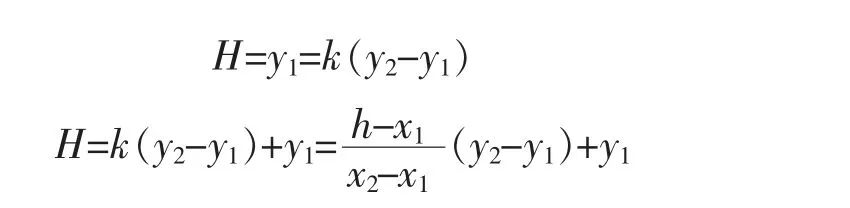
燃油计算软件根据信号转换盒输出的油面高度计算出对应数据库中的油面高度。计算方法如下:
数据库中油量为零时对应的高度为y1,满油时对应的高度为y2,调零时油量传感器输出的油面高度为x1,调满时油量传感器输出的油面高度为x2,h为信号转换盒输出的油面高度,可以依据以下公式计算出高度h在数据库中对应的油面高度H,见图3。

图3 油面高度换算图
先计算出高度h在调零调满高度所占的百分比k:

再计算出高度h在数据库中对应的高度H:
软件计算时,将左、右机翼内侧油箱视为A油箱组,左、右机翼外侧油箱作为B油箱组。
若计算得到的H不在区间[y1,y2]之内,则输出传感器故障信号至飞行参数采集器;若传感器故障信号持续5s,则判断该传感器故障,将该油箱油量置为同组油箱另外一根传感器采集油量;若同组油箱两根传感器均故障,则将同组油箱燃油均置为零。传感器故障信号将被飞行参数采集器记录,并且座舱综合显示器将出现相应的告警。
3.1.2 油面角
通常飞机油箱的外形尺寸相对于机体坐标系给出,机体坐标系如图4所示。

图4 机体坐标系
机体坐标系中,X方向沿飞机纵轴线向前;Y方向垂直于X轴并沿飞机法线向上;Z方向垂直于XY平面并沿飞机翼展向右。
俯仰角θ为飞机绕Z轴转过的角度,飞机抬头时俯仰角为正;滚转角Ф为飞机绕X轴转过的角度,飞机右倾时滚转角为正;偏航角ν为飞机绕Y轴转过的角度,机头朝左时偏航角为正。
油量传感器垂直安装于油箱内部,与Y轴平行。飞机水平飞行时,油量传感器轴线与油箱油面垂直;当飞机的飞行姿态改变时,在重力作用下,油量传感器轴线与油面的夹角发生改变,从而使油量传感器输出的电容信号无法反映油箱内真实油量。这种因飞行姿态使油量传感器产生的误差称为“姿态误差”。
偏航角为飞机绕地垂线转动形成的夹角,不影响油箱与油面的相对位置关系,也不会影响传感器与油面的夹角,不会造成姿态误差。因此,只有俯仰角和滚转角会引起油量测量的姿态误差。
燃油计算软件根据飞行参数采集器输出的X、Y、Z三个方向过载系数分别计算出飞机的俯仰角和滚转角。
俯仰角θ的计算公式:

滚转角Ф的计算公式:
式中,nx为X方向过载系数,ny为Y方向过载系数,nz为Z方向过载系数。
3.1.3 燃油质量特性数据库
燃油质量特性数据库中存储了各油箱在飞机处于不同油面高度H、俯仰角θ和滚转角Ф状态下的油量数据,俯仰角θ的范围为[-20°,20°],变化步长为0.5°,滚转角Ф的范围为[-10°,10°],变化步长为0.5°,油面高度的变化步长为5mm。燃油计算软件根据H,θ,Ф,通过数据分类、计算、插值、存储和调用等各种复杂运算得出各油箱油量和全机油量,该数据被输出至飞行参数采集器并在多功能显示器上显示油量数据。当油面高度、俯仰角或滚转角的值在步长之间时,使用线性插值得出油量。因A组、B组油箱几何特征和油量传感器布局均对称,故A组油箱查询数据库中同一组油量数据,B组油箱查询数据库中另一组油量数据。
以俯仰角[-0.5°,0°],滚转角[-0.5°,0°],油面高度[0,15]mm为例,给出数据库中存储的油量数据,具体见表2。

表2
假设图2中的油量处理模块1计算出的俯仰角为θi,滚转角为Фi,油面高度为Hi,则可以根据以下步骤计算出此时的油量m。
1)判断出θi的范围,θ1<θi≤θ2,θ2-θ1=0.5;
2)判断出Фi的范围,Ф1<Фi≤Ф2,Ф2-Ф1=0.5;
3)判断出Hi的范围,H1 4)计算线性插值的常数: 俯仰角为θi的插值常数: 滚转角Фi的插值常数:; 油面高度Hi的插值常数:; 5)计算出Hi在H2到H1之间的线性插值油量: a)计算俯仰角为θ1、滚转角为Ф1、油面高度为Hi时的油量: 其中,m211为油面高度为H2时的油量,m111为油面高度为H1时的油量; b)计算俯仰角为θ1、滚转角为Ф2、油面高度为Hi时的油量: 其中,m221为油面高度为H2时的油量,m121为油面高度为H1时的油量; c)计算俯仰角为θ2、滚转角为Ф1、油面高度为Hi时的油量: 其中,m212为油面高度为H2时的油量,m112为油面高度为H1时的油量; d)计算俯仰角为θ2、滚转角为Ф2、油面高度为Hi时的油量: 其中,m222为油面高度为H2时的油量,m122为油面高度为H1时的油量; 6)根据以上得出的油量计算出Фi在Ф2到Ф1之间的线性插值油量: 计算俯仰角为θ1、滚转角为Фi时的油量: 计算俯仰角为θ2、滚转角为Фi时的油量: 7)最后可计算出该油箱油量为 由于飞机飞行不平稳等原因造成油面剧烈晃动,将导致油量测量结果产生较大的浮动(实际油量不会产生较大变化)。为了保证测量结果的稳定性和准确反映油箱中的实际油量,需要对浮动的油量测量结果进行平滑滤波处理。平滑滤波的目的在于消除那些不能真实反映实际油量的测量点,以保证测量结果的稳定性。 图2中,某型飞机燃油计算软件中,由油量处理模块2对数据做平滑处理,即:堆栈中设置10个数据单元;首次采集数据时,便将该数据全部置入10个数据单元中;当采集到新数据时,将新数据计入堆栈最后一位,堆栈中所有数据向前移一位,最前面一位数据清除。每次接收到新数据都对堆栈中10个数据求算术平均值,并做取整处理后将油量值输出给油量数据储存模块。平滑滤波原理见图5。 图5 平滑滤波原理示意图 定时器每隔1s从油量数据储存模块读取1次数据,并将该数据输出给飞行参数采集器。该数据为单个油箱的油量,全机油量为4个油箱油量之和。 精准的算法与飞机显示的油量息息相关,针对某型机燃油系统油箱和油量传感器分布情况,给出了该型飞机燃油计算软件的功能和算法。燃油计算软件接收信号转换盒的信号,经过计算得出该油箱内的油面高度;同时燃油计算软件也接收来自飞行参数采集器的飞机X、Y、Z三个方向过载信号,经过计算求出油面角。飞机各油箱油面高度和油面角对应的油量数据已预先存入燃油质量特性数据库内,从而可精确得出油箱内的燃油油量。






3.2 数据后处理

4 结论
