多传感器和故障率隐半马尔可夫模型的剩余寿命预测方法*
2021-07-08王鹏瑞刘白林王浩同
王鹏瑞,刘白林,王浩同,赵 涛
(1.西安工业大学 新型网络与检测控制国家地方联合工程实验室,西安 710021;2.西安工业大学 计算机科学与工程学院,西安 710021;3.西北机电工程研究所,咸阳 712099)
现代复杂设备需要在高可靠性、低环境风险和保证人身安全的条件下运行,同时也要求设备处于健康运行状态以满足最大功率。提高复杂设备剩余寿命预测精度对于计划任务、安排维护和提高设备安全性至关重要。技术的发展导致复杂设备剩余寿命预测精度不高。为了对设备的剩余寿命进行精确预测,通过状态传感器历史监测数据结合故障率对设备的健康状况进行评估,能合理安排复杂设备生产工作,降低维护成本,最大限度地减少损失。
近年来,随着故障诊断和健康管理技术的飞速发展[1],目前有三种利用监测信息进行设备健康状态评估的方法。第一种方法是采用物理建模和参数识别技术,结合故障检测和预测算法来估计设备的剩余寿命,缺点是准确率较低且需要较高的成本。文献[2]应用隐半马尔可夫模型对设备在线运行过程中的健康状态进行识别与预测,提出了单监测信息在线健康评估方法,建立了多监测信息在线健康预测模型和剩余寿命预测模型,但是并没有考虑设备的故障率导致准确率较低。文献[3]提出了自适应隐半马尔可夫模型的前向—后向算法、Viterbi算法和Baum-Welch算法,利用最大似然线性回归训练对输出概率分布和驻留概率分布进行自适应训练,但是由于算法复杂导致计算复杂性较高且需要较高的成本。第二种方法是使用监测数据来评估设备的健康状况,缺点是模型收敛速度慢并且存在局部最小值,当监测数据急剧增加时,会出现计算爆炸问题。文献[4]提出了一种以近似算法与Viterbi算法为基础的贪婪近似法,动态地寻求最大概率剩余状态路径,但算法易陷入局部最优的局限性,所得剩余寿命预测结果为相对接近最优的结果,不一定为最优解。文献[5]提出了一种基于性能退化的剩余寿命预测方法,利用选择的特征训练长短期记忆网络进行退化轨迹预测,通过评估设备的健康状态,判断设备的剩余寿命,但此方法更适用于退化过程初期,当设备处于严重退化过程中时可靠性较低。第三种方法是构建数学模型来表示设备的劣化过程,缺点是计算和训练过程非常耗时。文献[6]采用支持向量机和隐马尔可夫模型提出了一种集成的诊断和预测体系结构,使用隐半马尔可夫模型来表示建模状态持续时间,解决了隐马尔可夫模型持续时间建模不准确的问题,但是由于参数数量较多导致计算和训练过程较为耗时。文献[7]提出相关向量机、逻辑回归和自回归滑动平均模型来评估基于从运行到故障轴承模拟数据的失效退化,利用逻辑回归模型计算设备的劣化过程,但模型中的目标向量过多导致训练耗时。以上三种方法都是通过单一信息源预测设备的健康状况且预测精度不高。
综上所述,为了获得更好的预测精度,使用多个传感器来收集监测信息。与单源信息相比,多传感器监测使剩余寿命预测精度更加准确,但建模分析更加复杂。本文提出利用极大似然线性回归变换方法来表示多个传感器之间的差异,并对状态持续时间和观测概率密度函数的差异进行归一化,得到不同状态的对数似然估计概率值,评估多传感器信息的设备健康状态。最后,建立基于多传感器和故障率隐半马尔可夫模型,该模型可用于获取设备运行状态的初始转移概率和预期持续时间,利用该模型对设备的剩余寿命进行预测。本文提出了多传感器和故障率结合隐半马尔可夫模型,利用极大似然线性回归变换方法表示多传感器之间的差异,修正持续时间和观测的概率密度函数。在模型中引入了故障率,降低了保持当前状态的可能性,同时增加了过渡到较不健康状态的可能性,利用历史采集数据来预测设备的剩余寿命。
1 隐半马尔可夫模型
隐半马尔可夫模型是一种利用可观测传感器信号来预测不可观测健康状态的理想数学模型。隐半马尔可夫模型通过向定义好的隐马尔可夫模型中添加状态持续时间来进行构造,与标准隐马尔可夫模型中的状态不同的是,隐半马尔可夫模型中状态的生成是一段可观测片段,而不是隐马尔可夫模型中单个观测集合。隐半马尔可夫模型的参数为:初始状态分布、转移矩阵、状态持续时间分布、观测模型。给定一个观测序列o,该观测序列采样自某个不可直接观测的状态序列s。其中状态持续时间为t时刻状态持续时间与t-1时刻状态持续时间的时间间隔,且t时刻状态仅取决于t-1时刻状态。只有当观测对象从一种状态转移到另一种不同的状态时,才能确保过去状态和未来状态之间的条件独立性。隐半马尔可夫模型对状态转移间隔间的观测信息进行建模,因此既具有隐马尔可夫模型逼近复杂概率分布的灵活性,又具有半马尔可夫模型表示状态持续时间的灵活性。
在到达故障失效状态之前,设备通常会经历几个不同的运行状态。假设运行状态被分为n个离散状态:1,2,3,…,n-1和F。通过训练好的隐半马尔可夫诊断模型可以在每个采样时间点对健康状态进行测试[8],因此可以将其视为一个随机过程:H={Ht:t≥0}。如果Ht=i,表示设备在时刻t处于状态Ht。假设当设备处于Ht状态时健康状态向下一个时间点j状态的转移概率Pij是固定的,对于隐马尔可夫链,未来状态Ht+1以及过去状态H1,…,Ht的条件分布为
P(Ht+1=j|Ht=i,Ht-1=it-1,…,H2=i2,
H1=i1)=P(Ht+1=j|Ht=i)=Pij,
(1)
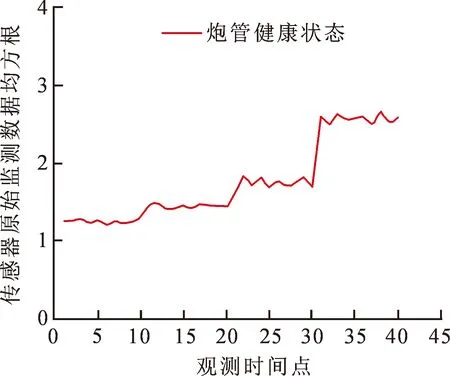
分段隐半马尔可夫模型的状态称为宏观状态,每个宏观状态由若干个单独的微观状态组成。假设一个宏观状态序列有n段,设qi为第i段端点(1≤n 时间单位1,…,q1︷一个宏观状态q1+1,…,q2微观状态…qn-2+1,…,qn-1qF观测o1,…,oq1oq1+1,…,oq2…on-2+1,…,on-1OF状态s1,…,sq1sq1+1,…,sq2…sn-2+1,…,sn-1sF持续时间d1=q1d2=q2-q1…dn-1=qn-1-qn-2dF=∞片段12…n-1F qij(k)=P(Ht+1=j,Xj=k|Ht=i)。 (2) qij(k)为状态i至状态j的初始状态分布,其结果取决于设备在前一时刻t处于状态Hi时,后一时刻t+1处于状态Hj,且Xj为某一状态j的持续时间表示为非负整数k。 多传感器信息的应用可以使得设备获得更好的预测精度,通过收集历史数据尽可能降低计算复杂度。为了融合不同传感器,使用极大似然线性回归的自适应训练算法来表示多个传感器之间差异的转换[9-10],自适应训练算法的基本思想是使用极大似然线性回归来训练规范模型。 自适应训练算法通过对标准模型的状态输出均值向量和持续时间分布进行线性变换,得到传感器的状态输出均值向量和持续时间分布。因此,可以对状态输出和持续时间分布进行如下修改: bi(o(s))=N(O;η(s)μi+ξ(s),∑i), (3) (4) 将最优模型参数集合λ和变换矩阵Ω联合统计,提出基于参数集估算的多传感器训练算法的重估计公式如下: (5) (6) (7) (8) 假设Y(s)=[η(s),ξ(s)]和X(s)=[δ(s),Ψ(s)],令Ω=(Ω(1),…,Ω(s))表示变换矩阵,Ω(s)=(Y(s),X(s))表示变换矩阵Ω(s)。重估计变换矩阵Ω(s)为 (9) (10) 多传感器自适应训练估计状态qt的最大后验估计表示如下: (11) 不同传感器的信息源在设备健康状况评估决策中发挥不同的作用,为了进行多传感器信息训练,使用极大似然线性回归方法对一个典型模型的状态输出和状态持续时间分布进行传感器归一化。 设T表示设备的故障失效时间,结合寿命分布函数F(t)和可靠性函数R(t),其中F(t)+R(t)=1,F(t)∈[0,1]。假设F(0)=0并且密度函数f(t)=F′(t)存在,则故障率函数可以定义为: (12) 假设设备在进入故障状态F前将经过健康状态Hi(i=1,2,…,n-1),D(Hi)表示设备处于健康状态Hi的预期持续时间,一旦设备进入健康状态Hi,其剩余时间将等于设备保持健康状态Hi的剩余时间和故障状态前维持在未来运行状态的总剩余时间之和[11-12]。 (13) 其中I是设备在进入状态Hi后的第I个观察样本并且at+ΔT=at+2·ΔT=…=at+I·ΔT≡Hi。R(t+IΔt)表示设备在t+IΔt时刻仍然处于状态Hi的概率,可以得到: (14) 因此设备进入状态Hi时第i个观测时间点的剩余寿命计算如下: (15) 步骤一:采集设备多传感器从运行状态至故障状态历史数据,得到各状态预期持续时间和初始状态转移概率。 步骤二:利用最大似然线性估计来表示多个传感器监测数据之间的差异,对状态持续时间和观测分布上的传感器差异进行归一化。 步骤三:引入故障率函数建立基于多传感器和故障率隐半马尔可夫模型。 步骤四:预测设备进入状态观测点后的剩余寿命。 为评估提出的基于多传感器和故障率隐半马尔可夫模型的剩余寿命预测方法在复杂设备剩余寿命预测方面的预测精度,利用某型自行火炮全炮电气子系统对其测试。某型自行火炮全炮电气子系统主要由火控系统、随动系统、电气系统3个子系统组成[13-14]。设置各子系统部件状态特征参数的出厂允许值,极限值已知,且利用各子系统上的28个传感器得到各状态参数的监测值,以评估自行火炮的全炮电气系统的健康状况[15]。 在本实验研究中,主要研究自行火炮的炮管磨损度是否处于健康状态,由于自行火炮长期处于运行状态,导致炮管磨损度偏高,发射火炮极易出现故障。在炮管中注入含尘油模拟炮管磨损过程,使得炮管的劣化不遵循一个自然过程。炮管经历了四种状态:健康运行状态、轻度污染状态(注入含尘油5 mg)、中度污染状态(注入含尘油10 mg)、故障失效状态(注入含尘油15 mg)。该炮管磨损实验中的各阶段对应于炮管内发射性能下降的不同阶段。由于炮管发射性能可以表示炮管的健康状况,因此在炮管磨损实验中,炮管中发射性能下降程度对应的故障阶段被定义为相应的炮管健康状况。 利用炮管子系统上28个传感器的监测数据,对自行火炮炮管健康状况进行评估,选取不同子系统上的4个传感器表明在时间点递增的情况下传感器监测数据的变化趋势,为炮管剩余寿命预测进行数据准备。表1为部分传感器监测数据。 表1 部分传感器监测数据 基于式(2),对炮管的监测数据进行隐半马尔可夫模型的自适应训练,可以在每个采样时间点对炮管健康状况进行训练,最终可以获得四种健康状态,分别为健康运行状态、轻度污染状态、中度污染状态、故障失效状态、传感器原始监测数据的均方根随观测时间点的变化趋势如图2所示。 图2 均方根随观测时间点的变化趋势 如图2所示,随着对炮管状态监测时间越长,传感器原始监测数据均方根值越大,炮管的健康状况也越差。均方根随观测时间点的趋势图整体呈现四个阶梯状,第一个阶梯为健康运行状态,第二个阶梯为轻度污染状态,第三个阶梯为中度污染状态,第四个阶梯为故障失效状态。随着观测时间的增加,炮管的健康状况逐渐恶化。 基于式(1),炮管由当前健康状态向下一个时间点状态的转移概率是固定的,由此得到炮管初始使用时的转移概率,即为四个运行状态之间的初始转移概率,各状态间的初始转移概率见表2。 表2 各状态间的初始转移概率 基于式(12)~式(14),可以通过故障率方程得到每个状态持续时间的期望值[16-17]。预期持续时间将等于炮管保持健康状态的剩余时间以及故障前维持在未来运行状态的总剩余时间之和,每个运行状态的预期持续时间见表3。 表3 每个运行状态的预期持续时间 隐半马尔可夫模型训练曲线如图3所示。根据图3所示,在模型训练过程中,随着迭代次数的增加,炮管的健康状态逐渐恶化,但是当加入故障率函数后,对数似然估计概率值曲线的增加逐渐缓慢,并且收敛误差限定在一个固定值。四种状态的对数似然估计概率值在不到50次迭代次数内达到设定的误差,表明该方法具有较强的实时信号处理能力。其中健康运行状态在第12次迭代后保持固定值,轻度污染状态在15次迭代后保持固定值,中度污染状态在20次迭代后保持固定值,故障失效状态在第10次迭代后保持固定值。 图3 隐半马尔可夫模型训练曲线 基于式(5)-式(11),根据参数集估算的多传感器训练算法的重估计公式得到多传感器自适应训练估计状态的最大后验估计,即为自行火炮炮管每个健康状态的似然概率值,不同状态的对数似然估计概率值的比较如图4所示。 图4 不同状态的对数似然估计概率值的比较 根据图4所示,分析每个健康状态样本的不同状态对数似然估计概率值,对数据使用最大似然线性估计来表示多个传感器之间的差异,对状态持续时间和观测分布上的传感器差异进行归一化,使得多传感器的监测精度、准确度更高。 基于式(15),计算炮管进入下一个状态时不同观测时间点的剩余寿命,根据健康状况预测分析结果,实际与预测剩余寿命的比较(28个观测点)显示见表4。 表4 实际与预测剩余寿命的比较(28个观测点) 基于多传感器和故障率隐半马尔可夫模型的炮管预测和实际剩余寿命的比较如图5所示。 图5 基于多传感器和故障率隐半马尔可夫模型的预测和实际剩余寿命的比较 由图5可知,为了验证所提预测方法的有效性,在炮管进入各运行状态后,利用28个观测点来预测剩余寿命,实际剩余寿命与预测剩余寿命的平均相对误差可以降低至6.6852%,提高炮管剩余寿命预测精度1.3%左右。能够较好的预测炮管的剩余寿命。预测的健康状态变化趋势与实际变化趋势大致相匹配,通过对预测剩余寿命和实际剩余寿命的比较,可以看出所提方法对多传感器信息的炮管寿命预测是有效的。 本文提出了一种基于多传感器和故障率隐半马尔可夫模型的剩余寿命预测方法。设计使用极大似然线性回归变换方法表示多传感器之间的差异,通过故障率与健康状态转换矩阵相结合的方法,建立多传感器和故障率隐半马尔可夫模型预测设备有效剩余寿命,并进行实验分析误差对比。 实验利用极大似然线性回归表示多传感器之间的差异,修正持续时间和观测的概率密度函数,使得多传感器的监测精度、准确度更高。通过分析隐半马尔可夫模型训练曲线,得出炮管的健康状态恶化情况减缓,四种状态的对数似然估计概率值在不到50次迭代次数内达到设定的误差,表明该方法具有较快的研究能力和较强的实时信号处理能力。 在多传感器监测设备健康预测的隐半马尔可夫模型中引入了故障率函数与健康状态转换矩阵相结合的方法,通过提出的故障率方程,可以预测多传感器设备的有效剩余寿命。实验结果显示实际剩余寿命与预测剩余寿命的平均相对误差可以降低至6.6852%,提高炮管剩余寿命预测精度1.3%左右。炮管的预测运行状态变化趋势与实际变化趋势相匹配。
2 多传感器信息的自适应训练





3 剩余寿命的故障率模型


4 剩余寿命预测流程
5 实验结果及分析







6 结 论
