上肢健身器生物激励设计与运动分析*
2021-07-08付雷杰千学明
付雷杰,魏 伟,千学明,白 瑀
(西安工业大学 机电工程学院,西安 710021)
随着经济水平的提高,人均寿命与身体健康状况等健康指标成为社会发展程度的重要体现。根据测算,中国的人均预期寿命为77.47岁,位于世界第64名,排名不高。全国经常参加体育锻炼(每周参加体育锻炼3次及以上,每次持续30 min及以上,每次体育锻炼的运动强度达到中等及以上)的人数仅占33.9%(包含儿童青少年),总体比例偏低。《健康中国行动(2019-2030年)》中提出,要在2030年使得经常参加体育锻炼的人数比例达到40%及以上。上述数据表明,在我国普及体育锻炼的空间非常大。开发健身器材,可以推动全民健身事业发展,具有重要的经济和社会意义。健身器材种类繁多,其设计原理也不尽相同。健身器材要能提供一定的负荷或运动等,供锻炼者去克服,以达到锻炼的目的。目前的健身器材设计也是从实现上述功能的角度出发,较少考虑其他的因素。实际上,自然界中有许多生物的运动方式就是很好的锻炼方法。仿生设计是一种典型的向自然界学习的设计方法,仿生设计更侧重于对现有一些生物的表面特征进行简单模仿[1-2]。随着仿生学的发展,采用生物领域知识来推动生物激励设计方法发展。生物激励设计在本质上是跨学科的一种设计方法,是使用生物系统的类比来开发工程问题解决方案。国内外学者在生物激励设计方法、生物材料、生物激励机制和传感器等方面开展了大量的工作。文献[3-6]针对生物激励设计进行了大量研究,在设计过程中的知识获取和类比推理等技术方面取得了一定的进展。现有的研究表明生物激励设计可以应用于多个不同领域,目前尚未见到采用生物激励设计方法进行健身器材设计。本文将生物激励的开发方案运用到人体上肢健身器材中,通过对生物运动的分析获取生物领域知识,通过类比将其应用于工程领域,实现对健身器材的设计,对健身器材的性能进行仿真分析。
1 生物激励设计
根据知识元距离确定最佳生物模型,并依据生物运动原理模型得到上肢健身器结构方案。基于现有的生物激励研究成果,采取以下步骤对所要设计的上肢健身器进行理论设计。
1.1 上肢健身器的定义
设计一种符合生物学特性,能够用于锻炼上肢的健身器材。对该目标进行功能分解,实现的功能是锻炼上肢。进一步对其进行功能优化,为了能够吸取生物知识,需要重新采用生物化方法定义问题,即某种生物的某种特性能够完成某项设计的特需功能[6]。功能的生物化问题不是“锻炼上肢”,而是“生物有哪些特性使它们能够预防、抵御和治愈骨骼老化”,有助于搜索合适的生物知识。根据问题的生物化定义,即可以进行生物知识的搜索。在搜索相关生物知识时,如果约束过少,会导致难以搜索到合适的知识,这时可以通过增加约束来提高搜索成功的概率。
1.2 解决方案定义
根据功能分解和优化,将所设计的内容分为两个问题:① 活动人体上肢;② 锻炼身体。在此基础上,在大自然界中寻取相关对应的生物或系统。对于问题1,选取了袋鼠、蚂蚱,它们的起跳运动使它们保持健康;对于问题2,选取了螳螂、青蛙,它们的活动使得身体凸显肌肉,改善身体美感。
将所需解决的问题定为一个知识元,将生物体的特性功能定义为另一个知识元,比较两知识元间一致性来确定需要学习的目标生物体。在知识元中,主要特征参数类型包括数值型、区间型、模糊评价型和文本型等。将人体上肢定义为目标知识元,它的特征可以用文本型和数值型来表示。上肢锻炼的角度一般是从双臂伸展,再向内拉到胸前位置,因此数值型特征值为90°。知识元间特征距离文本型检索计算公式为
Dist(x,y)=1-max(x,y)。
(1)
知识元间特征距离数值型检索计算公式为
(2)
式中:x为上肢健身器材特征;y为生物激励源知识元特征;Dist(x,y)为特征距离。目标知识元与生物系统的相似性计算采用式(1)和式(2)。
所选几种生物特征相似度比较结果见表1。

表1 生物特征相似度
由表1计算可知,对于文本型,其生物特征相似度一致,无法区别;对于数值型,其生物特征相似度从小到大依次为袋鼠<螳螂<蚂蚱<青蛙,在所挑选的四种生物中,袋鼠的腿部运动知识元与健身所要求的运动知识元间距离最小,最为符合上肢健身器的运动标准,故选取袋鼠作为生物激励本源。
1.3 原理提取与应用
从动力源、传动机构、神经元等生物角度分析袋鼠运动的特性。其动力源是生物的肌肉储能,主要位于大腿部位;传动机构是骨骼和关节,主要对应袋鼠小腿部位;神经元负责调节机体的运动,发起运动指令等;骨骼肌负责接收命令后带动骨骼做运动[7]。图1为袋鼠的运动模型。

图1 袋鼠运动模型
由于年龄、性别、体形等方面的差异,人的动作会有所不同。受到骨骼、肌肉、关节等的限制,人体上肢的运动规律是相似的[8-9]。从解剖学角度看,大臂上只有一块骨头就是肱骨,小臂上有两块,分别是尺骨和桡骨,跟腿部相似,尺骨在里面,桡骨在外面;肩部为支点,大、小臂肌肉作为储能源;手臂处骨骼负责传动,各部位相互协作完成运动。将袋鼠运动模型中的躯干、大腿、小腿等对应到人体锻炼时的肩部、大臂、小臂等部分,同时考虑到锻炼安全等因素,得到上肢健身器结构方案如图2所示。
该方案在人体背部设置2个可穿戴式的弹簧阻尼器,利用2根固定的连杆,连接弹簧阻尼和人体手臂,通过人体手臂的张合和弹簧产生的阻尼来实现人体上肢背阔肌、胸肌、斜方肌和三角肌的锻炼。
2 上肢健身器的建模与仿真
根据上述的上肢健身器结构方案,通过对比确定最优实现方案,得到健身器实体模型,并对模型进行仿真分析,验证设计的可行性与安全性。上身健身器造型要素包括背板比例尺度、手臂形态、手把形态和肩带形态等。其中背板比例尺度在整体上控制了整个上身健身外骨骼机构的大小,其他要素则组成了健身器的基本结构。普通上肢健身器配件以轻便为主,具体阐述如下:① 背板形态,主要指健身器的背板整体高度比,大致可分为矩形、正方形等。背板要求足够的抗弯曲能力,因此选用共聚甲醛(POM);② 手臂形态,分为薄板、方管、圆管等。手臂是锻炼器材的核心部件,要求足够的硬度和强度,以及抗弯曲变形能力,因此选用聚丙烯、碳钢等;③ 手把形态,包括一字型、L型、U型等。手把主要功能是便于人手握持,故尽量选择表面粗糙度较大的材料,选用聚乙烯、聚丙烯等;④ 运动阻尼,包括磁阻尼、弹簧阻尼等。目前电磁阻尼的材料多为铁合金,弹簧阻尼多为合金。
依据现有一些健身器材的造型可选要素,将以上可选要素进行组合排列,共有36种可选方案。考虑到健身时上肢外骨骼的运动要求以及人体适配性,方管与关节处的转承不协调;一字型手把形态不利于握持;背板为矩形,符合人体两肩形态,圆管有利于伸缩,锻炼者可依据自己手臂的长短调节合适的距离,且圆管与轴间转承相协调;阻尼部分的电磁阻尼调整方便,阻尼控制精确,需要额外的电路,成本较高,结构复杂;弹簧阻尼结构简单,成本低,因此选择弹簧阻尼。由以上分析可得,优选方案为矩形背板+圆管+L型把手+弹簧阻尼。
根据上述零件配置和前期意象语意与造型要素之间的相关性,得到上肢健身器的总体结构,如图3所示。此结构主体由背部支架、滑轮支架、拉簧支架和手臂组成。另外还有用于提供阻力的拉簧、直径较小的滑轮以及各个螺栓螺母固定零件等。机械部分材料选用6061-T4铝合金。对于肩部关节、滑轮架和拉簧架等重要部位采用40Cr,手柄材料为聚丙烯,背部支板材料为共聚甲醛(POM),背带材料为尼龙。

图3 上肢健身器模型
手臂部分,大臂小臂之间通过螺栓连接。大臂是直径刚好大于小臂的管状杆件。通过调节小臂在大臂伸缩的长度来改变整个手臂的长度,可适应不同手臂长度的穿戴者。背部支架包含一个固定支架和可调节支架。两支架通过螺栓连接,可调节支架可在固定支架中活动,两个零件都有螺孔,这样位置就可调。因为每个人的体型是不同的,这就要求距离可调,用来满足不同肩宽的穿戴者。弹簧连接件由滑动导轨支撑,滑轨上的滑块与弹簧连接件用螺钉固定,主要用于连接拉簧,拉簧的数目是可调节的。传动部分由钢丝线来完成,钢丝线绕过滑轮分别与对应的拉簧支架和大臂相连,穿戴者通过移动外骨骼的胳膊拉动钢丝,两根相反方向作用力的钢丝受到拉簧施加的阻力从而锻炼到上身。
健身器材除了要达到锻炼功能外,还要具备安全性,不能对使用人员造成伤害。上肢健身器的主要安全隐患在于是否会因为速度变化过大而对人员造成伤害。由于健身器是左右对称结构,对其一侧进行仿真测试即可。将健身器模型简化后导入ADAMS软件中进行运动学仿真,如图4所示。
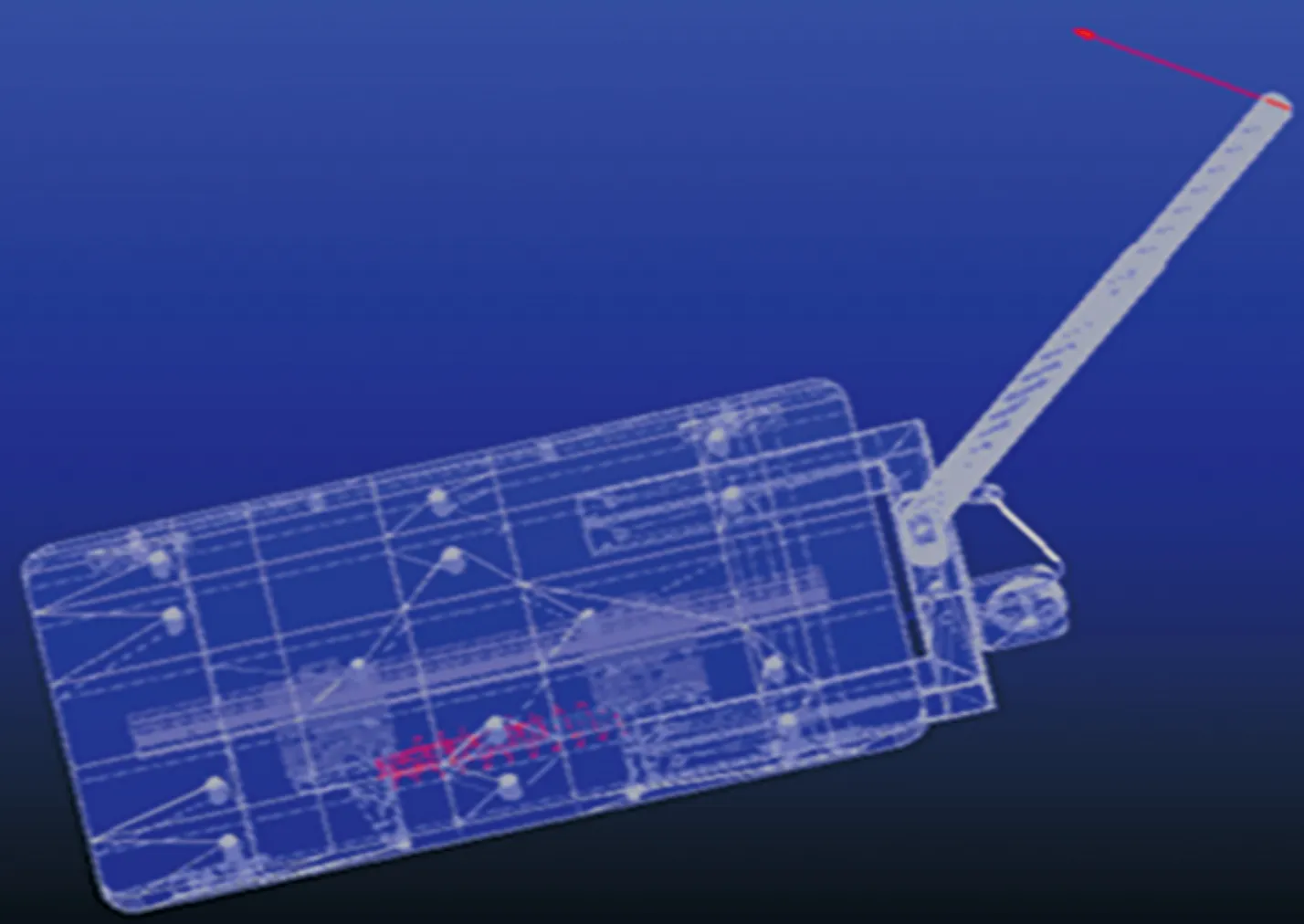
图4 仿真模型
不同人群锻炼时所选择的一般配重为200 ~400 N,将上述驱动力代入仿真模型,分析其运动特性,包括最大速度、最大加速度,见表2。
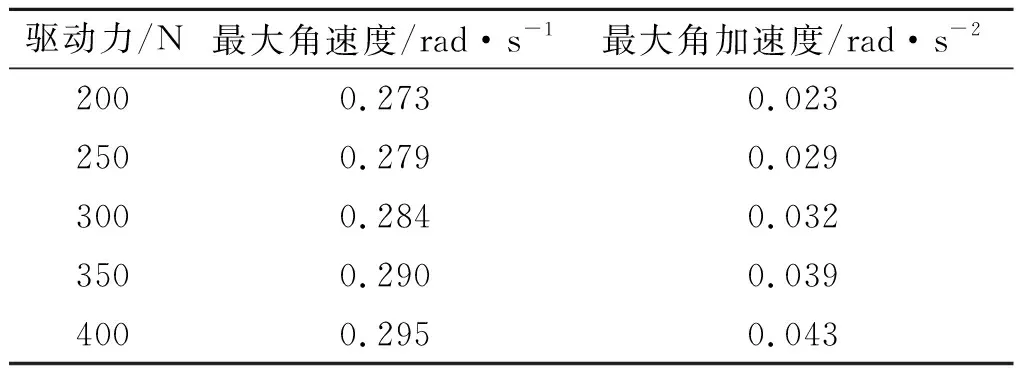
表2 上肢健身器运动仿真
由仿真结果可知,上肢健身器能够在正常锻炼时平稳运动,其最大角速度在0.30 rad·s-1附近波动,最大角加速度在0.03 rad·s-2附近波动,运动变化较为平稳,不会对人体造成误伤。
3 结 论
基于生物激励方法对上肢健身器进行了设计。计算设计目标与生物间的特征距离,确定了最优模仿对象,通过原理提取并基于原理对上肢健身器进行设计。在调研健身器设计元素的基础上,分析了多种设计方案并确定最优方案。通过ADAMS软件对健身器三维模型进行了动力学模拟,结果表明该设计方法实现了产品功能定义、生物功能检索、匹配生物筛选和功能原理提取等,是安全可行的。
