融合可见光无人机与哨兵2A 影像的森林火灾迹地精细化提取
2021-07-08徐伟恒黄邵东刘明露雷建寅徐海峰王秋华
熊 源 徐伟恒,2,3 黄邵东 刘明露 雷建寅 吴 超 徐海峰 王秋华
(1.西南林业大学大数据与智能工程学院,云南 昆明 650233;2.西南林业大学 大数据与智能工程研究院,云南 昆明 650233;3.西南林业大学林业生态大数据国家林业与草原局重点实验室,云南 昆明 650233;4.云南忆尘司法鉴定中心,云南 昆明 650051;5.西南林业大学土木工程学院,云南 昆明 650233)
森林火灾是导致森林资源损失的最主要原因之一,林火发生造成巨大的社会经济损失、生物多样性减少等后果[1-3]。因此,准确,快速的提取森林火灾迹地面积对评估灾后损失,进行客观的林火司法鉴定具有重要意义。传统的圈定火灾范围需要通过大量野外调查或基于卫星影像进行提取,而野外调查费时费力,卫星影像往往因为其较低的空间分辨率导致无法准确提取火灾迹地[1,4]。
近年来,无人机(UAV)多光谱影像因其具有空间分辨率高,光谱信息丰富的特点,被广泛应用于森林火灾迹地的提取。Mckenna 等[5]基于火灾前后2 景无人机RGB 影像结合过绿指数差值(dEGI),过绿指数比率差值(dEGIR)及改进的过绿指数差值(dMGIR)指数提取了澳大利亚昆士兰州实验火灾迹地及区分了不同燃烧程度。Shin 等[1]基于1 景无人机多光谱影像,比较了光谱角制图(SAM)、最大似然法(ML)以及归一化植被指数(NDVI)阈值法在对火灾迹地烧伤程度区分的表现。Gibson 等[6]基于哨兵2(Sentinel−2)数据,结合随机森林(RF)进行火灾严重程度制图,对区分未燃烧区域和严重烧伤(冠层全部烧毁)区域精度达到95%以上。Pádua 等[7]比较了Sentinel−2 与无人机多光谱影像利用差分归一化燃烧率(dNBR)在对森林火灾迹地提取效果的相关性,证明了Sentinel−2 遥感数据比无人机更具有成本效益。但是以往基于UAV 对森林火灾迹地进行提取都是基于火灾前后2 景影像以及需要无人机搭载多光谱传感器,以便应用相关的差值植被指数对林火迹地进行提取。
可见光UAV 造价较低,容易获取,考虑UAV搭载传感器的成本与适用性,对仅含可见光波段UAV 影像的使用范畴更广[8-9]。但其仅有R、G、B 3 波段,对于森林火灾迹地的提取无法提供有效的光谱信息。因此只能通过目视解译对过火区域进行人工矢量化,虽有实地调查数据辅助,但由于不同燃烧程度火灾迹地在影像呈现出不同的颜色,导致部分过火区域与未过火区域颜色表征混淆,再加上人工判读经验差异,主观性导致解译的结果与真实过火面积存在一定偏差,从而影响林火司法鉴定的结果的准确性。Sentinel−2 影像数据具有多光谱的优势,利用NDVI、归一化燃烧率(NBR)等能准确将过火区域提取,通过火灾前后2 景影像所计算的dNBR能划分森林火灾迹地的不同燃烧程度[4]。但是基于Sentinel−2 影像提取的火灾迹地分辨率仅为10 m,对于过火区域的面积计算与真实过火面积将会存在一定偏差。鉴于此,本研究提出一种基于单景UAV 可见光波段与Sentinel−2A 多光谱遥感影像相融合进而对森林火灾迹地进行提取的方法,可为林火司法鉴定提供一种新的手段。
1 材料与方法
1.1 数据来源及处理
1.1.1 森林火灾信息
火灾发生地点为昆明市宜良县马街镇兴隆村(103°14′18″E,25°11′21″N),时间为2020 年4月20 日15 时30 分许,林火主要向西北方向蔓延,火线断续分布,经3 h 左右林火被消防人员扑灭。火场主要植被类型为云南松幼林及杂草,经林火司法人员鉴定,过火面积约99.76 hm2。
1.1.2 UAV 影像数据
本研究采用大疆创新(DJI)系列的Mavic pro 无人机进行火灾迹地遥感影像采集,其搭载24 核处理器、4 枚图像传感器、1200 万像素航拍机及双模式卫星定位系统。航拍相机可翻转90°实现竖拍,最近对焦距离为0.5 m。三轴增稳云台可消除因拍摄过程中镜头抖动而引起的图像变形[10]。无人机航拍器具体参数见表1。

表1 DJI Mavic pro 无人机主要参数Table 1 Main parameters of DJI Mavic pro UAV
UAV 遥感影像拍摄时间为2020 年4 月24日,共572 张照片,采用Pix4Dmapper Pro 对照片进行正射校正及图像拼接。最终获得分辨率为0.174 m×0.174 m 的像元数1.26×108个,总面积为381.20 hm2,正射校正结果见图1。

图1 无人机正射校正及拼接结果Fig.1 Orthorectification and splicing results of UAV
1.1.3 Sentinel−2A 影像数据
本研究使用Sentinel−2A 影像数据与UAV 影像融合使得研究区影像同时具备多光谱信息及高空间分辨率。Sentinel−2A 数据由美国地质勘探局(USGS)网站获取。Sentinel−2A 为欧洲航天局(ESP)于2015 年6 月23 日发射,重访周期为10 d[11]。本研究Sentinel−2A 影像获取原则为在研究区火灾发生之后,且时间与UAV 影像采集时间尽可能相近的无云覆盖研究区的高质量影像。于是本研究选择1 景成像于2020 年4 月21 日的Sentinel−2A 影像,由于该景Sentinel−2A 数据的产品级别是Level−1C,也即是经过正射校正和亚像元级几何精校正后的大气表观反射率产品,因此预处理过程只需进行大气校正即可[12-13]。Sentinel−2A 的波段信息见表2。

表2 Sentinel−2A 传感器波段信息Table 2 Spectral bands for the Sentinel−2A sensor
1.2 火灾迹地提取方法
火灾迹地提取流程见图2,具体步骤如下:

图2 融合无人机与哨兵2A 遥感影像的森林火灾迹地提取流程图Fig.2 Workflow of forest burned area extraction of UAV and Sentinel−2A remote sensing image
1)将UAV 的R、G、B 3 个波段分别进行1、2 m 下采样,作为影像融合的高空间分辨率波段。
2)将Sentinel−2A 的20 m 分辨率的3 个红边波段(B5、B6、B7)以及2 个短波红外波段(B11、B12)上采样为10 m,然后与10 m 分辨率的蓝(B2)、绿(B3)、红(B4)及近红外(B8)4 个波段进行波段合成,得到一个10 m 分辨率的9 波段影像,用作影像融合的多光谱数据。
3)将UAV 的R、G、B 波段分别下采样到1、2 m,将下采样得到的6 个波段分别与上述合成后的影像进行空间配准,控制点误差均保持在1 个像元以内,分别采用格莱姆−施密特(GS)和主成分光谱锐化(PCSS)2 种方法进行影像融合。
4)对上述12 种融合结果进行融合质量评价,以确定最佳的融合影像。
5)基于上述最佳融合影像,根据研究区过火区域、未过火植被区域以及裸地3 种地物类型样本,选用NDVI、火烧面积指数(BAI)、归一化水汽指数(NDMI)、NBR 4 个指数及所有光谱波段为森林火灾迹地提取特征,基于ENVI 5.3平台的RF 算法进行森林火灾迹地提取,RF 参数采用ENVI 随机森林模块默认参数:随机森林数为100 棵,特征数量(Numbers of Features)使用平方根方法(Square Root)确定,即Numbers of Features=sqrt(n),n 为输入待分类影像的波段数;利用不纯度可以确定节点基于哪个特征开始进行分裂,对于分类问题,节点不纯度函数(Impurity Function)采用基尼系数(Gini Coefficient)。
6)应用同样的特征、样本及提取算法对仅利用Sentinel−2A 影像进行森林火灾迹地提取。
7)比较2 种影像对森林火灾迹地提取的精度及过火与未过火区域边界的区分效果。
1.3 融合方法
1.3.1 GS 融合方法
GS 算法首先对多光谱波段按照一定的权重进行计算,模拟出低分辨率的全色影像作为GS1;然后用模拟的GS1进行GS 正变换,计算GS1波段和全色波段的均值及标准差,对全色波段和GS1波段进行直方图匹配;最后用匹配后的全色波段替换GS1进行GS 逆变换,得到高空间分辨率多光谱融合影像。
1.3.2 PCSS 融合方法
PCSS 算法是先将低空间分辨率多光谱数据进行主成分变换,高空间分辨率波段被缩放匹配到第一主成分波段,从而避免了光谱失真,再用高空间分辨率波段替换第一主成分波段,函数自动将多光谱数据重采样到高空间分辨率像元尺寸,然后进行主成分反变换得到融合影像。
1.4 影像融合质量评价方法
遥感数据融合是提升影像应用能力的重要手段[14]。评估融合后的影像质量,对分析融合效果,改进融合算法参数具有重要意义[15]。最佳的融合影像既能保留全色波段高空间分辨率的地物细节特征,同时具备多光谱的光谱信息,当融合的2 景影像空间分辨率差异较大时,会出现严重的光谱和空间失真[16]。因此,当全色影像空间分辨率远高于多光谱空间分辨率时,适当降低全色影像的空间分辨率,可提高影像融合质量[17]。本研究将UAV 的R、G、B 3 个波段分别下采样成1、2 m 分辨率的影像,然后与Sentinel−2A 多光谱10 m 分辨率影像进行融合,然后对融合结果进行评估。本研究选取了具有代表性的信息熵(EN)、标准差(STD)、相关系数(CC)、通用影像质量评价指标(UIQI)、SAM 以及相对全局维数综合误差(ERGAS)等6 个指标对上述12 景融合影像的进行质量评价。EN 及STD 主要反映影像的空间细节信息,融合影像中EN 和STD越大,说明影像中包含的信息也就越多,融合效果最好。CC 越大,说明融合影像最接近原始影像,丢失的信息越少;UIQI 考量的是影像亮度成分的畸变程度,值越大,说明其亮度保持度越好,融合质量也越好;SAM 表示融合影像与参考影像之间的光谱扭曲程度,SAM 值越小影像融合质量越好;ERGAS 表征的是影像融合时对光谱重建质量的偏差,值越小,融合影像的光谱质量越好。
2 结果与分析
2.1 融合影像质量评价
根据表3 对融合影像质量进行评价。1 m 尺度下3 个波段的SAM 指标在GS 影像中是一致的(6.800),且小于其他SAM;不论1 m 还是2 m 尺度下R 波段的UIQI 指标在GS 融合影像下是最高的(0.882);1 m 尺度下R 波段的GS 影像的ERGAS 指标最小(6.232);而1 m 及2 m尺度下B 波段的GS 融合影像的CC 指标最大(0.901),均高于其他融合影像下的CC 指标;2 m 尺度下B 波段的GS 融合影像的EN 指标最大(7.455),位居第2 的则是1 m 尺度下R 波段的GS 融合影像(7.319);而2 m 尺度下B 波段的PCSS 融合影像的STD 最大。
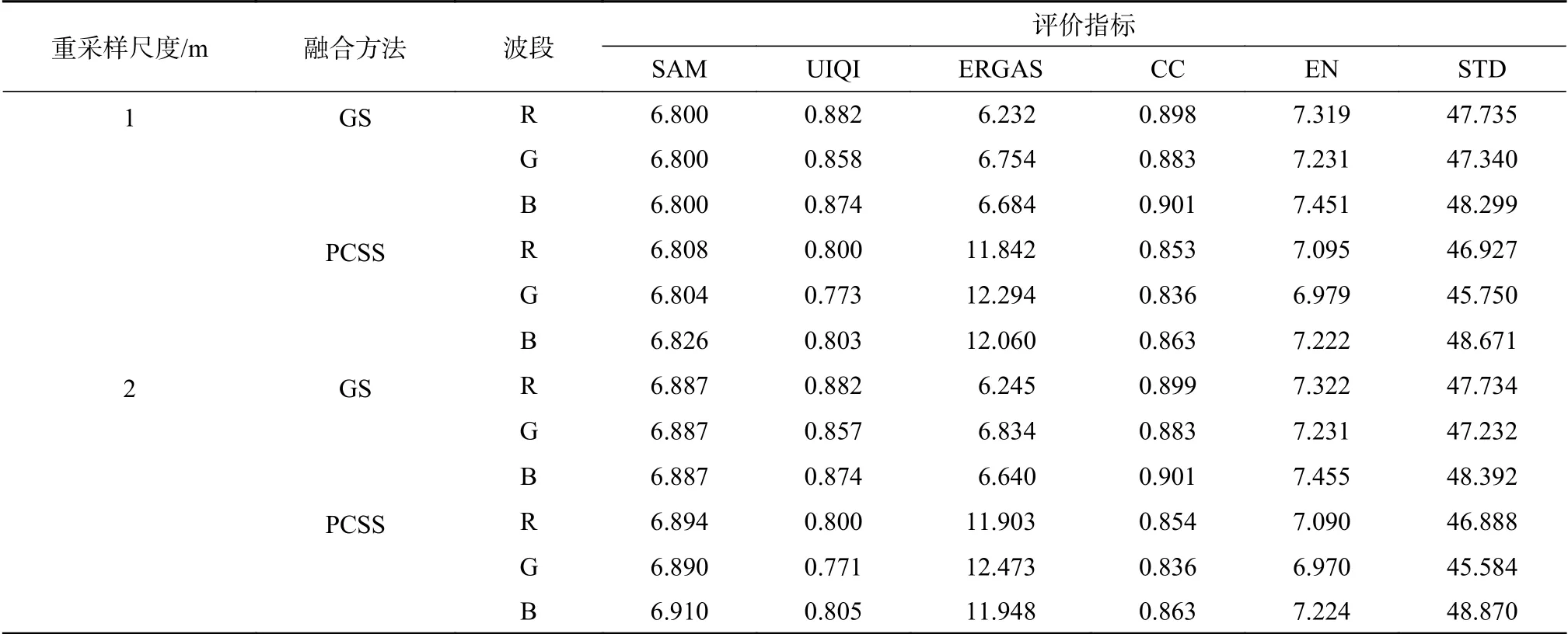
表3 无人机R、G、B 3 波段与哨兵2A 多光谱影像融合质量评估Table 3 Fusion quality evaluation of R,G,B derived from UAV with Sentinel−2A multi-spectral image
就融合方法而言,GS 不论在R、G、B 波段的1 m 或2 m 尺度下各指标表现都优于PCSS;对于本研究而言,在保证影像空间分辨率的基础上,需要尽可能的保证融合影像的光谱信息。而R 波段在1 m 采样尺度下GS 融合影像的SAM 与ERGAS 指标表现突出,说明该融合影像的光谱信息保持较为良好,此外,其EN 指标仅次于B 波段2 m 尺度下的GS 融合影像,说明其信息量保持也较为完整;而该影像的其他指标与其他采样尺度下的两种融合方法结果相比差异较小。综合考虑,本研究选择R 波段1 m 采样尺度下的GS融合影像作为森林火灾迹地提取的基础数据。
2.2 森林火灾迹地的提取
在最佳融合影像上选择常用的RF 算法对研究区森林火灾迹地进行提取。在UAV 正射校正影像的火场边界内选取过火植被、未过火植被及裸地样本进行RF 分类训练,样本分布及样本数量见图1、表4。

表4 火灾迹地提取训练样本Table 4 Training samples for burned area
对提取结果进行局部展示,见图3。图3a 为精度验证随机点分布图,本研究在精度验证时将未过火植被与裸地样本归为一类;图3d 为Sentinel−2A 影像提取 结果;图3g 为Sentinel−2A 与UAV 融合后的提取结果。图3c 和图3f 是局部提取细节展示区域,图3b、e、h 分别对应Ⅰ区域的原始真彩色影像,Sentinel−2A 和融合影像的提取结果;图3c、f、i 分别对应Ⅱ区域的原始真彩色影像,Sentinel−2A 和融合影像的提取结果。

图3 林火提取结果及局部效果展示Fig.3 Display of forest fire extraction results and details
2.3 森林火灾迹地提取精度的评价
本研究基于ArcGIS 10.5 平台,在火场边界内生成500 个随机点,然后对其进行目视解译,落在森林火灾迹地上的随机点415 个,非过火区域随机点85 个。基于随机点分别对应用Sentinel−2A 单景影像 及Sentinel−2A 与UAV 融合后的 影像对森林火灾迹地提取结果进行精度评价,结果见表5。

表5 森林火灾迹地提取精度评价Table 5 Evaluation of extraction accuracy of forest burned area
由表4 可知,就2 种影像提取精度而言,融合影像与仅用Sentinel−2A 影像对于森林火灾迹地提取的生产者精度分别为96.14%、95.18%,使用者精度分别为97.79%、96.57%,Kappa 系数分别为0.83、0.76。融合影像对于森林火灾迹地提取的各精度都高于仅用Sentinel−2A 影像对于林火迹地提取的精度。融合影像和Sentinel−2A 影像都具备多光谱信息,因此对于火灾迹地的提取精度都较高;而融合影像较Sentinel−2A 的空间分辨率较高,因此对过火区域及未过火区域边界的刻画更加细致。由图3 可知,图3h 和图3i 分别较图3e和图3f 对过火与未过火区域边界的区分更加明显,对过火区域中小面积的未过火区域保留效果显著,分别与原始影像图3b 和图3c 的表征更为接近。就森林火灾迹地提取面积而言,司法鉴定人员手动矢量化过火面积为99.76 hm2,融合影像提取面积为96.27 hm2,与统计面积相对误差为−3.5%;Sentinel−2 影像提取过火面积为93.53 hm2,与统计面积相对误差为−6.2%。2 种影像对于火灾迹地提取的面积均小于人工目视解译勾绘的面积。
3 结论与讨论
本研究将0.174 m 分辨率UAV 的R、G、B 波段分别下采样到1 m 和2 m,然后分别与10 m 分辨率的Sentinel−2A 多光谱影像进行GS与PCSS 融合,选取6 个定量指标对上述12 种融合结果进行融合质量评估,最终选用UAV 影像的1 m 分辨率的R 波段与Sentinel−2A 影像的融合结果,利用RF 算法进行森林火灾迹地的提取。然后与仅用10 m 分辨率的单景Sentinel−2A 影像对森林火灾迹地提取效果进行对比,即从森林火灾迹地提取精度、过火区域与未过火区域分界效果以及提取的过火面积与人工矢量化过火面积相对误差三个方面进行对比。结果表明:1)采用1 m空间分辨率的UAV 影像与10 m 分辨率的Sentinel−2A 影像,基于GS 算法进行融合,空间分辨率比例合适,融合影像光谱一致性好,影像融合质量较高;2)仅用Sentinel−2A 影像能实现对林火迹地大致范围的提取,但是对过火区域与未过火区域的界线区分不够明显,界线呈锯齿状,且容易将夹杂在过火区域中的未过火小区域误判为过火区域;3)而基于1 m 分辨率UAV 影像的R 波段与10 m 分辨率Sentinel−2A 多光谱融合为1 m 分辨率的产品,再进行森林火灾迹地提取,对过火区域与未过火区域的边界区分更加细化、紧致及平滑,融合后的影像同时具备了UAV 影像的高空间分辨率及Sentinel−2A 影像的多光谱信息,对于过火区域与未过火区域界线划分效果显著,能够辅助人工快速的进行森林火灾迹地精准矢量化,弥补了林火司法鉴定过程中对森林火灾迹地进行人工矢量化时,部分燃烧不彻底的森林火灾迹地表征出与未过火植被相似的颜色特征而无法准确计算过火面积,从而影响司法鉴定结果的客观性。因此,利用单景可见光UAV 与Sentinel−2A 影像采用GS 融合方法,基于RF 算法可高精度、精细化将森林火灾迹地提取,且边界细节效果刻画更加明显。
本研究方法可大大提高林火司法鉴定效率,减少外业工作量及降低成本,使得矢量化更加精准。对于大面积火灾迹地大致范围的提取可以考虑利用Landsat、MODIS 影像,而对于森林火灾迹地精细化提取而言,基于Sentinel−2A 与UAV影像相融合进行提取则更为适合。在下一步的研究中将考虑利用Sentinel−2A 影像选择林火发生之前的影像进行林型分类,使得林火司法鉴定结果更加客观公正。
