基于多目标优化的系泊系统设计
2021-07-07金珈辉刘永慧
金珈辉,刘永慧
(上海电机学院电气学院,上海201306)
随着新能源需求的不断增长,风电行业的发展不断加速,相关的近浅海浮式风电研究成为学者们的研究热点。对于浮式风电平台而言,近浅海的气象观测尤为重要,观测网络的传输节点由浮标系统、系泊系统和水声观测通信系统组成。其中系泊系统由钢管、钢桶、重物球、锚链和抗拖移锚组成,水声通信观测系统安装在系泊系统的钢桶内[1]。针对通信方面,通信传播效果在钢桶轴线与竖直线重合时达到最大[2]。对于观测过程,观测精度随着钢桶水平漂移半径的减小而增强[3]。因此,优化观测通信器竖直倾斜角和水平漂移半径,有助于提高系统的观测和通信性能。
张华杰等[4]通过对悬链线进行受力分析,建立悬链线标准方程,并分析不同应力情况下系泊系统的数学模型,考虑约束条件对锚链形态优化求解。Touzón等[5]针对浮标与系泊系统之间产生的动态张力进行分析,避免拟静态分析在张力方面的不准确性,并将线性化运动耦合模型应用于双体浮杆型振荡水柱,通过与等效时域仿真结果进行比较,验证该方法在张力方面的准确性。以上研究主要通过模拟构件的张力进行悬链线的近似建模,但悬链线模型的误差极易受到构件数量和近海气候的影响。因此后续通过分析构件的应力,建立系统的受力分析模型。Monteiro等[6]针对用于超深水油气开采的浮式生产系统(FPS)在非对称布局下的大量立管,建立确保立管完整性的系泊配置优化模型,利用跟踪中心轨迹内点法进行求解,有效地处理了非线性约束。王志东等[7]通过对内转塔内部结构进行数据化,引入系泊缆预张力等参数,分析外部荷载对单点系泊系统的动力效应影响。
上述研究均针对单一材料的系泊系统进行模型优化,而对于复合材料的系泊系统,模型的计算量较大。为提高系泊系统的观测和通信性能,优化系泊系统的结构设计,减小模型的计算复杂度,本文首先进行力学计算得出构件所受的外部荷载,对构件进行受力和力矩分析,并通过联立方程组,推导出构件倾斜角,进而简化数学计算。然后以通信器倾斜角为底层优化目标,水平漂移半径为上层优化目标,建立多目标优化模型。最后分析最优解的分布特性,引入基于粒子群和人工鱼群的混合优化算法,综合利用粒子群优化(Particle Swarm Optimization,PSO)算法的局部收敛性和人工鱼群算法(Artificial Fish Swarms Algorithm,AFSA)的良好全局性,使计算的收敛速度加快,结果更加精确。
1 力学模型
1.1 基本假设
为简化问题,便于模型的建立与求解,针对图1系泊系统提出以下假设:
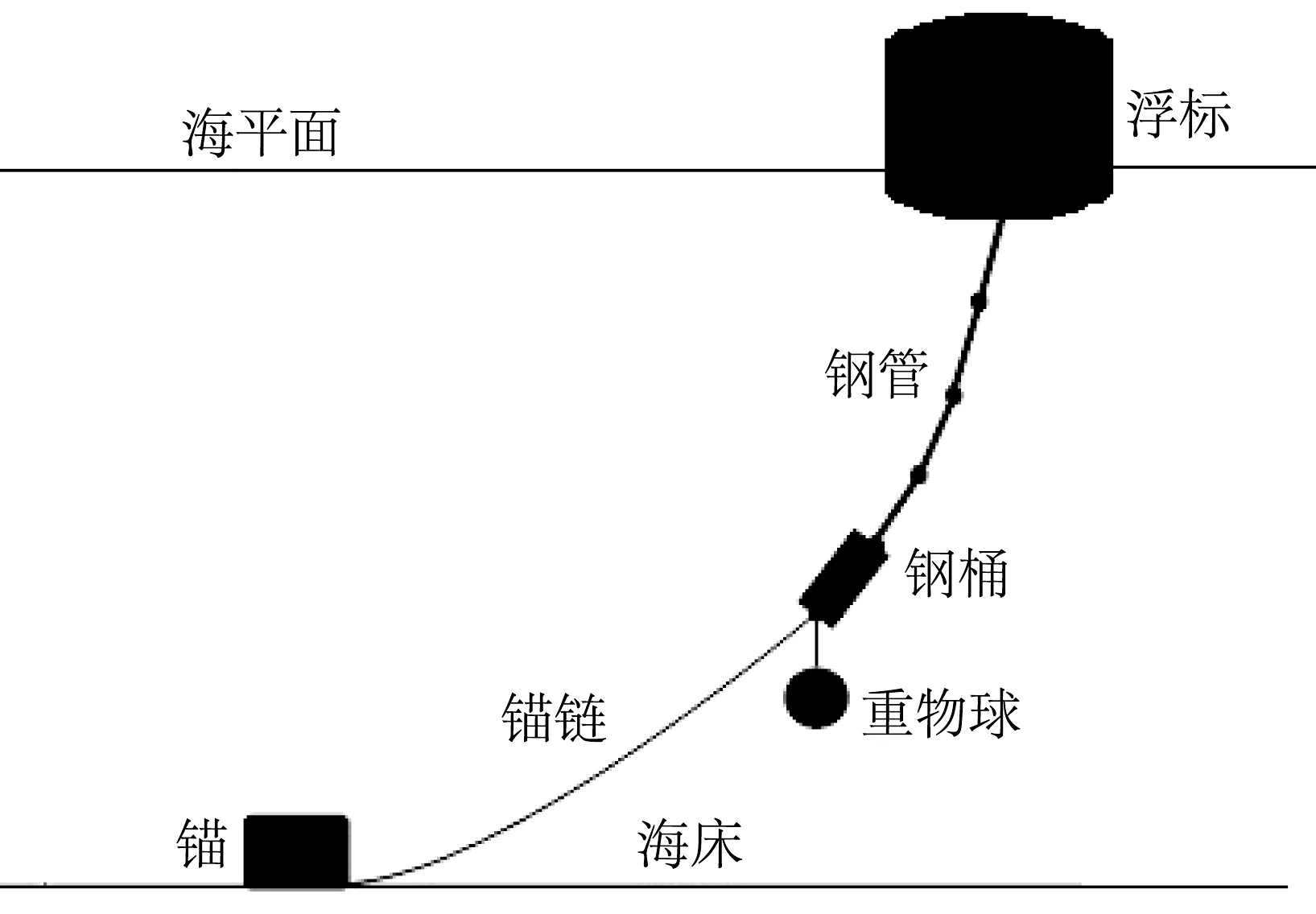
图1 系泊系统示意图
(1)假设锚链所受到的浮力可以忽略。
(2)假设重物球可以看作一个质点,即只有质量,体积忽略不计。
(3)假设锚链末端切线方向与海床夹角不超过特定角度时锚不动。
1.2 力学计算
分析系泊系统所受外部环境,构件易受到风和水流外力的作用发生倾斜。本节将系统所受外力,以构件所受荷载的形式导入优化模型。
1.2.1 近海荷载 相对于物体内应力,荷载是使物体产生形变的外力,为施加在工程结构上使物体产生效应的同种直接作用力的总和,近海的浮标和构件只受到风荷载和水荷载作用。
(1)风荷载。风荷载也称风的动压力,是空气流动对工程结构所产生的压力。由文献[8]近似公式可得近海风荷载为

式中:Fwind为构件所受近海风荷载;S1为物体与风的有效接触面积;vwind为风速。
(2)水荷载。水荷载也称水的动压力,是由于水流的质量及流速而产生的力。由文献[9]近似公式可得近海水荷载为

式中:Fwater为构件所受近海水荷载;S2为物体与水的有效接触面积;vwater为水流速度。
1.2.2 构件浮力 浮力为物体在流体内各表面受流体压力的总和,即物体所受的浮力等于物体下沉静止后排开液体的重力。构件所受浮力为[10]

式中:Fb为构件所受浮力;ρ为海水密度;g为重力加速度;V为构件入水体积。
1.3 力学分析
本节对系泊系统各构件进行力学分析,结合构件近海所受风荷载和水荷载,建立各构件的受力平衡和力矩平衡方程。
1.3.1 受力平衡 力学系统中,受力平衡是指在参照系内,物体保持静止或匀速直线运动状态。基于假设条件,对构件进行受力分析,构件的受力示意图(示意图仅表示力的方向,不表示力的大小)如图2所示。
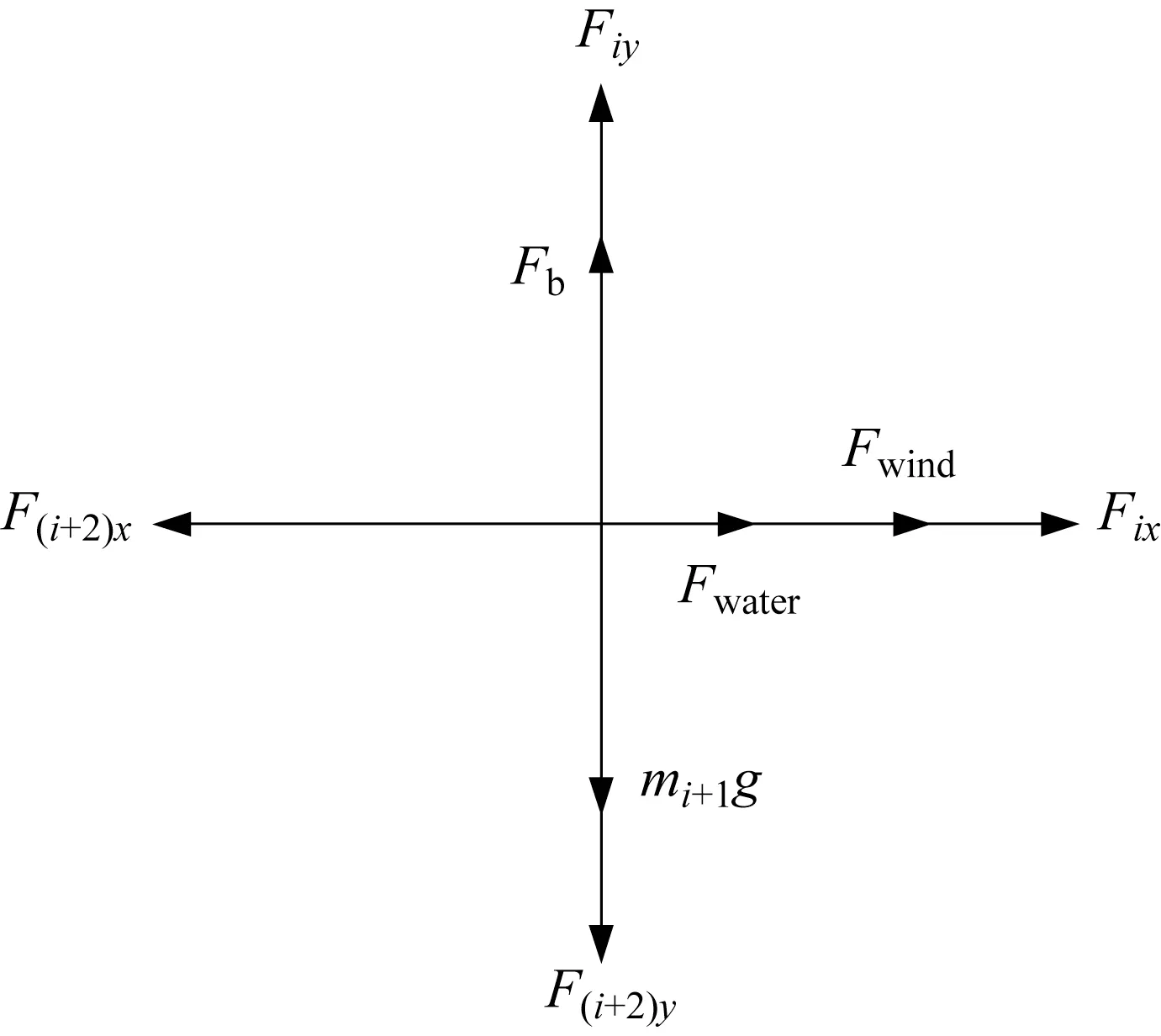
图2 构件受力平衡示意图
将力分解得到浮标受力平衡方程为

式中:mi+1为构件i+1的质量;F iy、F ix和、分别为构件i和构件i+2拉力在y轴和x轴分解后所得的力;i为构件编号,取值范围为i=1,2,…,q,q为构件总数。
1.3.2 力矩平衡 物体上的作用力与力臂的乘积称为力矩。稳定的系泊系统应满足力矩平衡,为便于模型简化,选择构件与上一构件相连节点作为支点进行分析。
根据力学力矩平衡公式[11],可得钢管与钢桶力矩平衡方程为
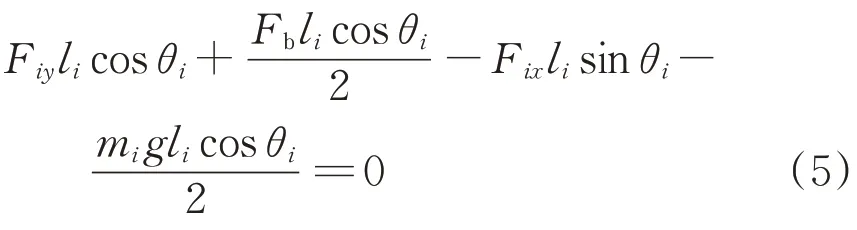
式中:l i为构件长度;θi为构件末端与水平面夹角;mi为构件i的质量。
1.4 模型简化
联立式(4)、式(5),可得受力平衡和力矩平衡方程组,但方程组的计算复杂度会随着构件数量呈现指数级别的上升。为降低计算的空间复杂度,对构件倾斜角化简可得
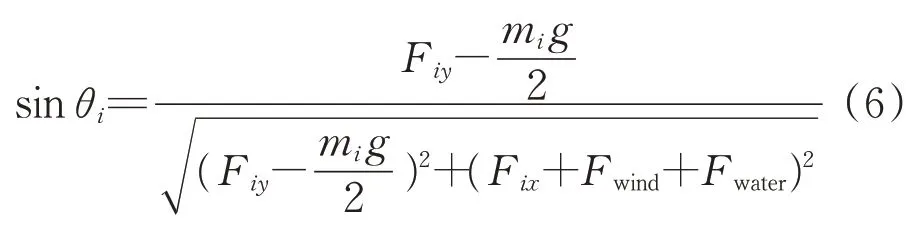
可见式(6)降低了求解计算的空间复杂度。由于近海系泊系统遇到风浪会产生动态激发运动,因此系泊系统的设计需要确保水深,同时不影响通信和观测。本文采用海水深度进行求解,提高了模型的实际应用程度。海水深度等于构件垂直方向投影之和,即

式中:x为浮标吃水深度。
2 系泊系统优化
通过分析系泊系统构件可知,构件增多,钢桶倾斜角减小,水声通信效果提高,但构件的增多会造成漂移半径增大,降低观测效果。考虑到设备运行的质量要求,需同时对水声通信器倾斜角和漂移半径进行优化。因此,系泊系统的优化设计可以描述成以下多目标优化问题,同时实现通信器倾斜角和漂移半径最小化目标。
2.1 通信器倾斜角
2.1.1 目标函数 系泊系统的水声通信器,其工作原理是通过模拟转换器将采集的信息转换成电信号,又通过电转换器将电信号转换为声音信号;声音信号通过介质将声音信息传递到声音接收器,将声音信号又转换为电信号,最后通过电反转器将电信号还原成采集信息[12]。相比有线通信来说,水声通信速率低,且易受干扰,因此减小通信器倾斜角保证通信质量,是保证数据采集的前提,其目标函数为

式中:e为通信偏正量;θ5为钢桶与水平轴夹角。
2.1.2 约束条件 由流体力学理论可知,当重物球质量增大时,通信器倾斜角减小。但重物球质量过大时,浮标沉入水中,会导致观测节点丢失。因此通信器倾斜角需满足重物球质量约束如下:
①上限。仅挂重物球就能使浮标恰好没入水中,即

式中:m5,max为重物球上限质量;F i,b为构件i所受浮力。
②下限。系统无需挂重物球就能达到稳定效果,即重物球下限质量m5,min=0。
2.2 漂移半径
2.2.1 目标函数 由于观测端与被观测端的相对运动,使观测信号的频率发生变化。除了设备的相对运动外,起伏的海面、无规则的海洋状况对观测信号的回收也会引入多普勒频移,导致多途效应非常明显。为增加设备的观测精度,减小多途效应,本文通过构件的长度和倾斜角度,计算构件在水平方向的投影长度,得出其漂移半径目标函数为

式中:r为漂移半径。
2.2.2 约束条件 分析式(10)可知,锚链过多时,漂移半径增大,导致观测精度降低;而锚链过少时,由于锚链末端、锚链接处的切线与海床的夹角超过特定角度,锚被拖行,会致使节点移位丢失。因此漂移半径需满足锚链节数约束和节点稳定性约束如下:
(1)锚链节数约束。
①上限。当不挂重物球且浮标恰好完全没入水中时锚链的长度达到上限,即

式中:Mmax为锚链的总质量。
依据锚链总质量、线密度和单节锚链长度,得到锚链节数的上限,即

式中:ω为锚链的线密度;l为单节锚链长度。
②下限。假设此时钢管、钢桶、锚链处于同一竖直线,可得锚链节数的下限为

式中:l1为单节钢管长度;l2为钢桶长度。
(2)节点稳定性约束。该系泊系统工作时,要求锚链末端、锚链接处的切线方向与海床的夹角不超过特定角度θmax,以此角度为约束条件得

式中:θq为连接拖锚的锚链与水平轴夹角。
2.3 目标函数
综合式(7)~式(14),对目标设置权重,将多目标优化转化为单目标优化,建立的目标优化模型如下:
式中:w1、w2分别为通信器倾斜角和漂移半径的优化权重;T为锚链节数。
3 混合优化算法
考虑到多目标优化模型的求解计算量较大,由此引入智能优化算法进行辅助求解。通过分析可知,单一材料的系泊系统优化模型具有单调性,可以通过PSO算法进行求解。但对于复合材料,建立的系泊系统优化模型不具有单调性,单纯采用AFSA求解非单调模型,收敛速度较慢[13]。因此引用人工鱼群和粒子群的混合优化算法(PSOAFSA),结合PSO算法的局部收敛性[14]和AFSA的全局对比性[15],提高算法的收敛速度和精度。
分析解空间的局部单调性,将鱼群设置为精英群和普通群,以AFSA和普通群探索局部最优区域,再通过精英群将局部最优区域传递给PSO算法,并快速收敛至局部最优解,从而加快全局最优解的计算。
(1)初始化。设置人工鱼群初始位置状态X={X1,X2,…,XN},视野半径Vs,移动步长S,鱼群拥挤限度δ,最大试探次数nmax;设置粒子群惯性权值ωp,加速度参数c1和c2。
(2)设置公告板。计算个体人工鱼的适应度值Y,得最优值Yb记录在公告板内。
(3)粒子群。根据适应度值排序Y,选出前T1个作为精英群p1,按PSO算法进行更新,得最优适应度值Pb和新种群。
(4)人工鱼群。精英群之外的普通群p2,按AFSA算法进行更新,得最优适应度值Ab和新种群。
(5)更新公告板。比较Pb和Ab的适应度值,得到最优值,并与公告板上Yb比较,如优于Yb,则更新公告板,否则不变。
(6)终止条件判断。重复(3)~(5)步,直到公告板上的最优解满足误差条件。
(7)算法终止。输出最优解(即公告板上适应度值及个体位置)。
通过式(6)对倾斜角化简,引入混合优化算法,从而降低力学模型计算的时间和空间复杂度。在约束条件下,以通信器倾斜角和漂移半径为多目标进行全局搜索,求解出最优的锚链型号、长度和重物球设计方案。
4 算例分析
设定钢桶的倾斜特定角度为5°,锚链末端的倾斜角度小于16°时,系统不会被拖拽偏移。以最大水速1.5 m/s,最大风速36 m/s为近海水域背景条件,表1锚链数据为选择范围,进行混合优化算法的求解。
表1 锚链型号和参数
综合考虑目标函数的重要程度,求解上述优化模型,部分搜索结果如表2所示。
表2 型号I锚链部分迭代结果
选取V型号的锚链19.8 m,重物球3 500 kg作为系泊系统最优设计。该设计在风速36 m/s,水流速度1.5 m/s,水深20 m的情况下,钢桶倾斜角度为4.853 3°,钢管倾斜角度从上到下依次为4.631 3°、4.698 2°、4.765 4°、4.832 8°,浮标的吃水深度为1.619 1 m,浮标的游动半径为14.281 m,锚链末端的倾斜角度为15.778 6°。
为了对比混合优化算法的计算性能,将AFSA、PSO算法和PSO-AFSA连续运行30次所得函数最小适应度值的平均误差和平均迭代次数作为对比指标,测试结果如表3所示。
由表3可知,PSO算法迭代速度最快,但易陷入局部最优,导致结果误差较大;AFSA误差最小,但迭代次数过多,计算效率较低;PSO-AFSA迭代次数比PSO算法略高,结果误差比AFSA算法略高,但综合了两者的计算效率和精度。为进一步检测算法的有效性,建立误差随迭代次数的变化趋势,如图3所示。
表3 不同算法测试结果比较
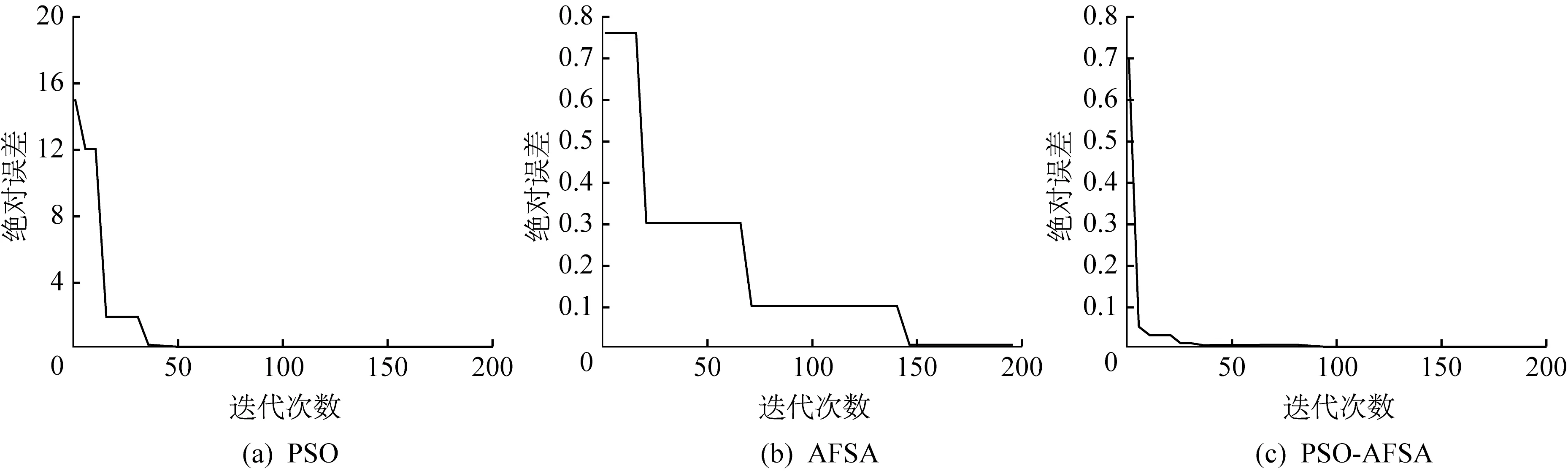
图3 适应度误差变化曲线
由图3可知,PSO算法收敛速度过快,陷入局部最优,导致结果误差较大;AFSA算法迭代过程中滞留时间过长,导致迭代速度较慢;PSO-AFSA不仅收敛速度快,而且求解精度高。
5 结 论
本文通过分析海水深度、海水浮力、风荷载以及水荷载,建立了系泊系统的力学平衡模型。以系泊系统的采样稳定为目标,建立了以通信器偏角和游动范围为优化目标的模型,并引入PSO-AFSA进行模型求解。对单个构件进行力学分析建立优化模型,并通过PSO-AFSA优化算法提高计算效率和计算精度,设计出系泊系统的最优设计方案,为一定范围内近海海域情况提供了参考方案。
