基于非线性能量阱的吊物系统减摆试验研究
2021-07-07王紫超彭轶文李博涛沈文爱朱宏平荀东亮
王紫超,彭轶文,李博涛,沈文爱,朱宏平,黄 灿,荀东亮
(1. 中交第二航务工程局有限公司, 湖北 武汉 430040;2. 交通部长大桥梁建设施工技术交通行业重点试验室, 湖北 武汉 430040;3. 华中科技大学 土木与水利工程学院, 湖北 武汉 430074)
吊物系统是船用起重机上配备的工程搬运设备,被广泛应用于跨海桥梁结构施工作业[1,2]。然而,由于受到复杂海况下的波浪荷载、风荷载等激励的作用,吊物系统不可避免地发生摆振,极大地限制了施工作业的开展,影响施工工期,造成重大经济损失。其次,其过大摆动也易与周围物体发生碰撞,影响起重机工作效率以及人员作业安全[2~4]。因此,对起重船吊物系统的摆振控制具有重要意义。
过去二十年,起重船吊物系统的摆振控制研究取得了一定进展。Chin等[5~10]提出了吊物系统的延迟反馈控制方法,然后对操作起升、回转和变幅的伺服电机施加控制。张春巍等[11~15]提出了控制吊物系统回转摆振的调谐转动惯量阻尼器,并通过缩尺和足尺试验验证了其摆振控制效果。虽然主动摆振控制方法[16],如延迟反馈控制方法具有优越的摆振控制性能,但其系统复杂且成本较高,因此发展高性能被动减摆装置也是目前起重船吊物系统摆振控制的方向之一。
非线性能量阱(Nonlinear Energy Sink,NES)属于被动减振装置,与传统TMD(Tuned Mass Damper)不同,NES的工作频带更宽,拥有更好的鲁棒性[17]。NES本质上是非线性减振装置,其非线性特征为:在荷载 - 位移滞回曲线中,NES几乎不存在任何线性回复力分量。正是由于NES产生非线性回复力的特性,使其能在更宽的频率范围内与主体结构发生响应,将结构振动能量从低阶振动模态转移到高阶振动模态,再通过NES自身的阻尼元件更快地耗散。Hrovat等[18]发现,调整非线性刚度和阻尼的大小可以有效改善结构振动。Starosvetsky等[19]通过试验研究对NES参数进行优化,试验表明最优参数下NES在结构减振系统阻尼较小时的控制效果要比传统线性阻尼器的控制效果更为优秀。Quinn等[20]在前人基础上分别对三种不同类型NES进行有效阻尼参数设计,试验结果表明考虑有效阻尼设计的NES减振效果十分明显。NES在国内也受到了广泛关注,王菁菁等[21,22]对NES进行了试验研究和数值模拟,NES能够显著降低结构的地震响应,并能与主体结构的多阶模态发生耦合,使能量从低阶模态转移至更高阶的模态从而更快地耗散。另外,电涡流阻尼的基本原理就是将结构振动的机械能转化为导体板中的热能而耗散掉[23,24]。迄今,结合电涡流阻尼和NES的相关研究还较少。
本文提出一种旨在抑制起重船吊物系统大幅摆振的电涡流非线性能量阱减摆装置(ENES)。其基本原理为:当吊物系统发生摆振时,含永磁铁的圆柱体会沿着特定轨道运动并产生自转运动,因此永磁铁与轨道旁的导体板产生相对运动,从而切割磁感线并在导体板中产生感应电涡流,进而产生电涡流阻尼力。由焦耳定律,电涡流会使导体板发热从而耗散吊物系统的摆动能量。本文采用试验方法对ENES的减摆效果进行了系列研究。通过缩尺吊物系统模型振动台试验,系统测试了具有不同质量比和不同磁场强度的ENES减摆性能,分析质量比和阻尼对其减摆性能的影响规律,为起重船吊物系统ENES减摆设计提供重要参考,也为后续的参数优化奠定基础。
1 试验概况
1.1 试验模型
根据试验要求,采用如图1所示的六自由度振动仿真平台进行试验。振动台由六个作动器,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六个作动器的伸缩运动,完成上平台在空间六个自由度的运动,从而可以模拟出各种空间运动姿态。考虑试验大厅中振动台与周围设备的距离,选择吊索长度为2 m,吊钩质量为800 kg,自振频率为0.32 Hz。
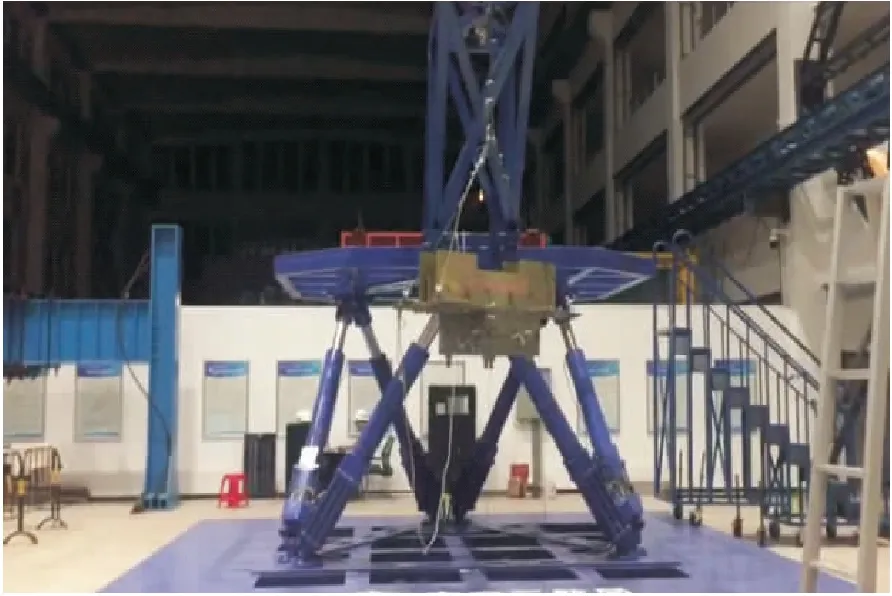
图1 吊物系统缩尺模型摆振控制振动台试验
吊钩质量块含一块主板和若干配重板,通过改变配重板数量可控制试验中ENES的质量比。主板尺寸为1300 mm×500 mm×20 mm,配重板尺寸为500 mm×500 mm×100 mm,材料为45号钢,配重板和主板之间用M30双头螺栓连接,吊索采用四根直径为10 mm的钢丝绳。
ENES所选取的圆柱体质量块质量大小为16 kg,材料采用45号钢,中间放置圆柱形永磁铁。考虑到质量块在运动过程中可能发生偏转现象,将质量块设计成外径160 mm、内径140 mm的形式,中间圆孔直径52 mm,长150 mm,如图2a所示。强磁铁采用直径50 mm、长150 mm两端带磁的圆柱形磁棒,磁场强度选用2000,4000,8000 Gs三种不同磁性的磁棒。对于本试验轨道形状的选择,根据王菁菁[22]对不同轨道形式对NES减振效果影响的研究,综合考虑NES的减振效率、所产生的回复力形式以及本试验的具体情况,轨道形状函数选用y=2.5x4非线性轨道,材料采用45号钢。电涡流导体板采用10 mm厚铜板制作,并且控制铜板与磁棒两端距离在1 mm左右(轨道与底板、铜板开孔尺寸限制,可以保证滚动质量块在运动过程中与铜板距离基本不变),另外还有防止质量块在运动过程中掉落的底板、限位板等,材料均选用10 mm厚45号钢。ENES整体装配图如图2b所示。NES模型的整体尺寸示意图如图2c所示。
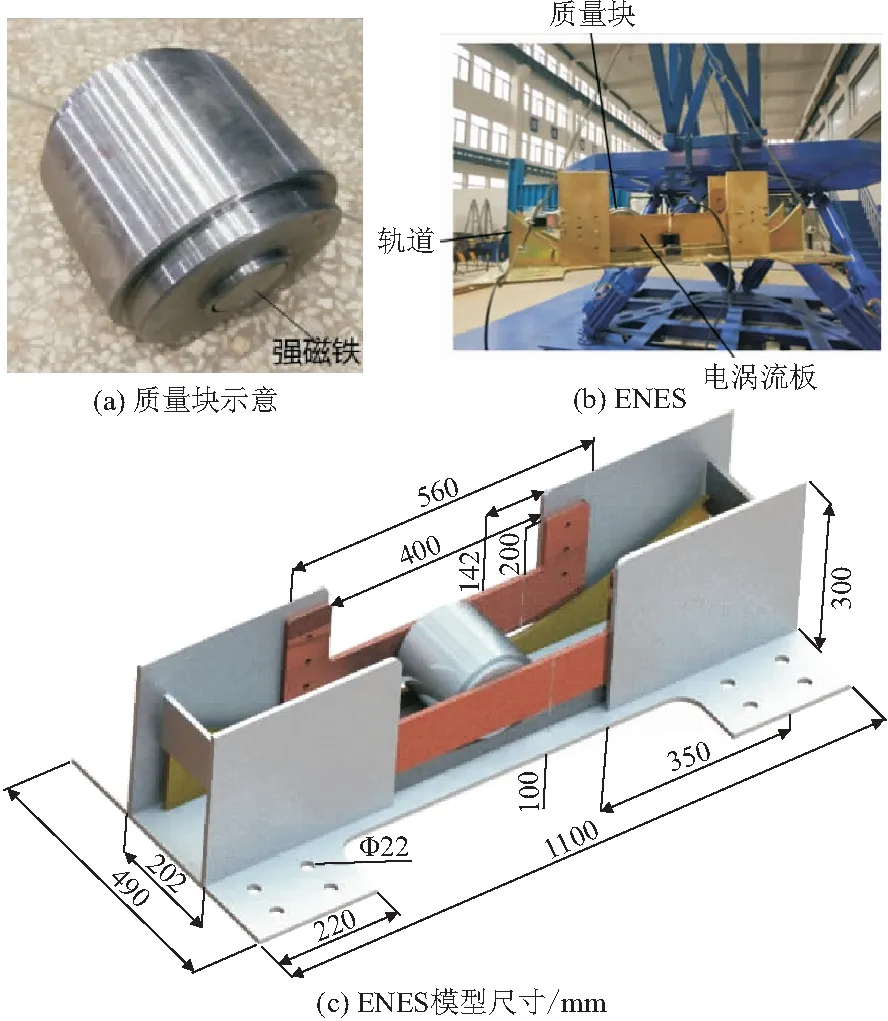
图2 ENES的构造
1.2 试验传感器布置与选择
本试验选用加速度计与倾角仪两种传感器,其中加速度传感器选用941B型超低频拾振器,倾角仪选用武汉中航测电BeanDevice INC无线倾角计。试验布置x,y两个方向的加速度传感器以及y向单个方向的倾角仪,其中y方向加速度传感器测量吊钩切向加速度,x方向加速度传感器测量吊钩法向加速度,传感器布置图如图3所示。
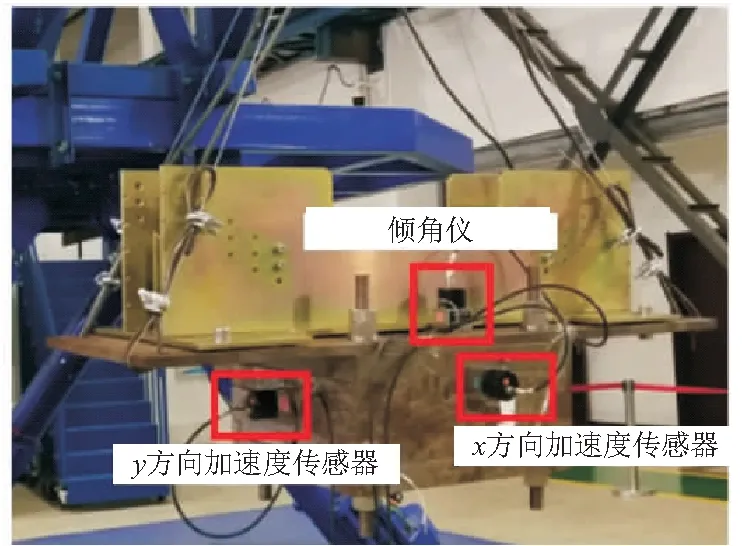
图3 传感器布置
1.3 试验方案
本试验研究在自由振动和简谐激励(吊物系统共振频率附近)下ENES的减摆效果,其中质量比μ通过逐步减少吊钩模型中配重板数量,取2%,3.2%,5.3%,8%,16%五种不同的质量比,表1为2%质量比的ENES减摆试验工况。阻尼大小通过在ENES质量块中附加不同磁场强度的磁铁来改变,取无磁铁以及2000,4000,8000 Gs三种不同磁场强度的磁铁这四种形式与无控情况进行对比。试验主要从吊物系统吊钩摆角和加速度响应等指标研究ENES对吊物系统的减摆效果。
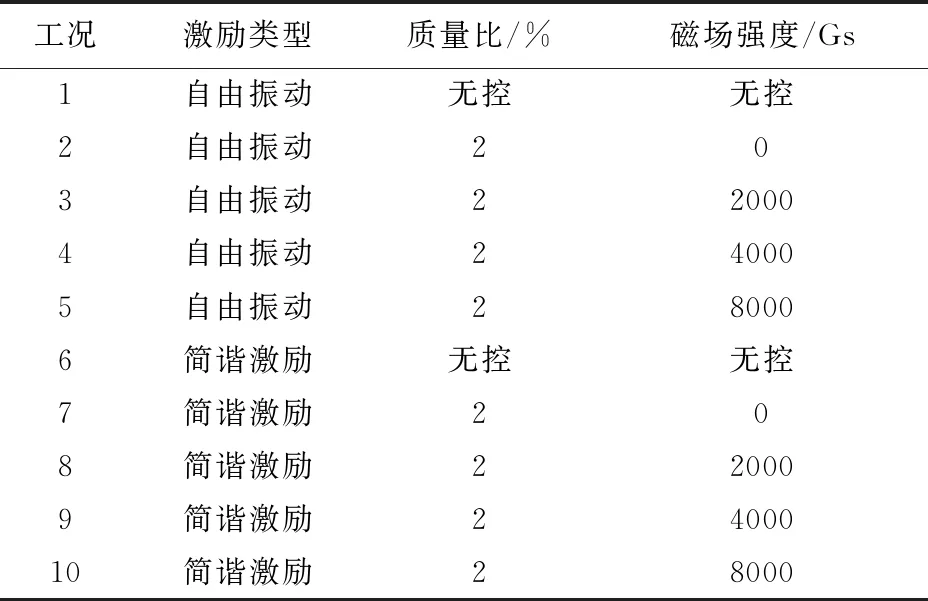
表1 质量比2%的ENES减摆试验工况
2 试验结果及分析
2.1 自由振动
在自由振动试验中,控制吊摆初始位置相同。试验测得质量比16%、磁场强度8000 Gs,时域和频域内吊摆加速度响应如图4,5所示。从加速度和摆角时程图和频谱图可以看出,自由振动下ENES对吊物系统的加速度和摆角响应均有一定控制效果。
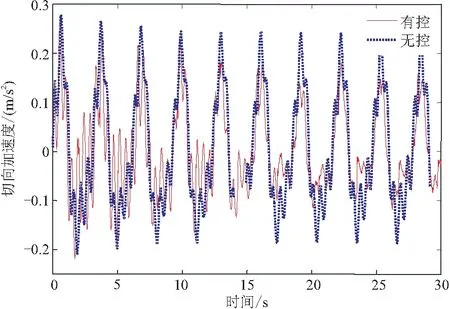
图4 切向加速度时程对比
图6对比了有控与无控工况的吊钩加速度响应小波频谱图。在0.32,0.65 Hz处的能量曲线分别与吊物系统的一阶和二阶频率对应,阴影越深,表示该频率能量越大,阴影越浅,能量越小。观察可得,在0.32 Hz这一主要频率处的能量经ENES系统,传至二阶频率处,并在此频率进行耗散。
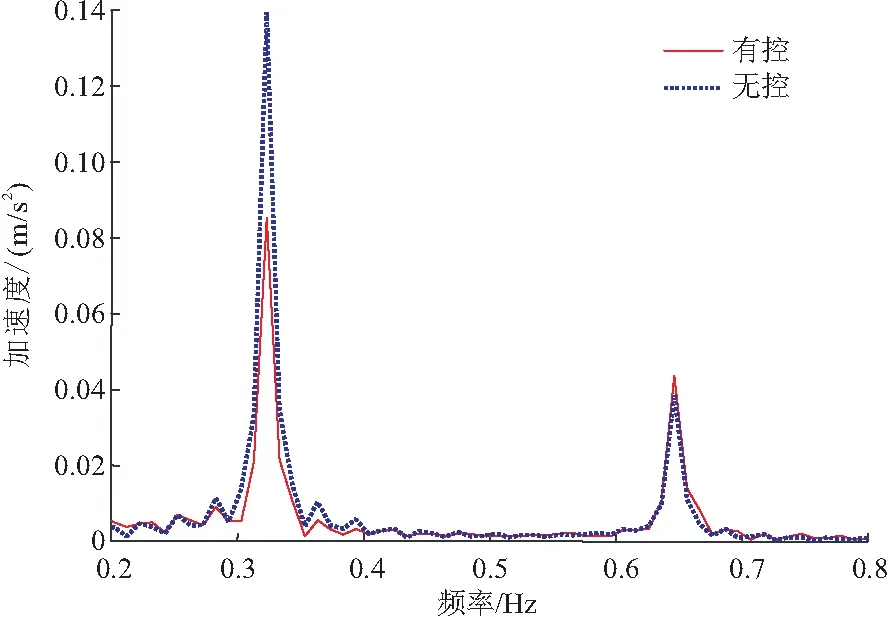
图5 切向加速度傅里叶频谱
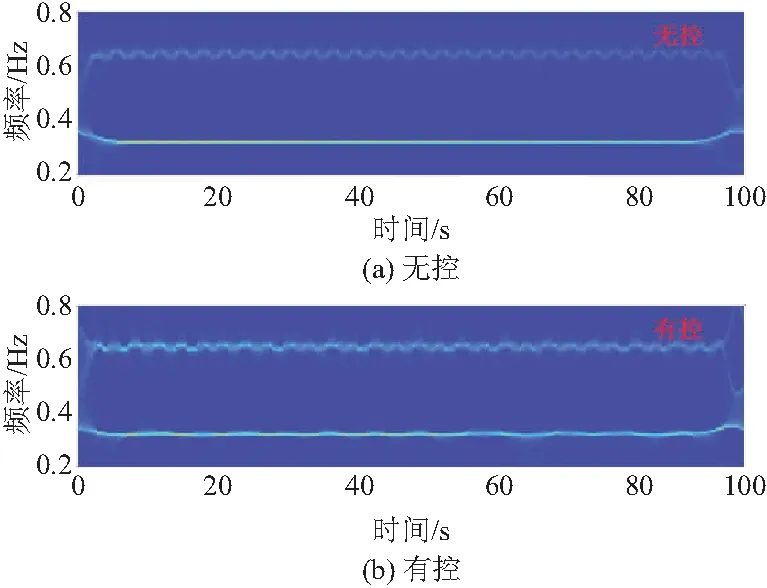
图6 加速度小波频谱
电涡流阻尼磁场强度为2000 Gs,不同质量比下,ENES对吊钩加速度和摆角幅值以及均方根控制效果如表2所示。
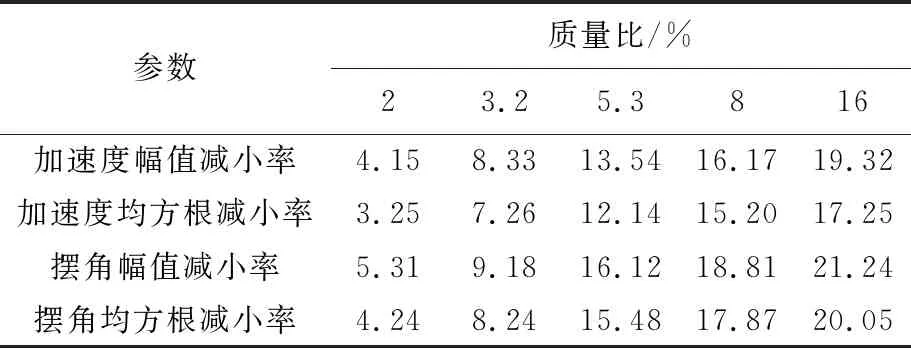
表2 不同质量比ENES的减摆效果 %
磁场强度4000,8000 Gs情况下试验数据所得规律跟表2相同,此处不再赘述。从表2可以看出,在自由振动下,当质量比从2%增大到16%时,ENES对于吊物系统加速度和摆角的幅值和均方根值的控制效果均有所增大。其次,ENES对摆角的控制效果略优于对加速度的控制。
将质量比为8%的试验数据进行整理,得到不同阻尼大小下ENES对吊钩加速度和摆角幅值以及均方根控制效果,具体试验结果列于表3,趋势线如图7所示。
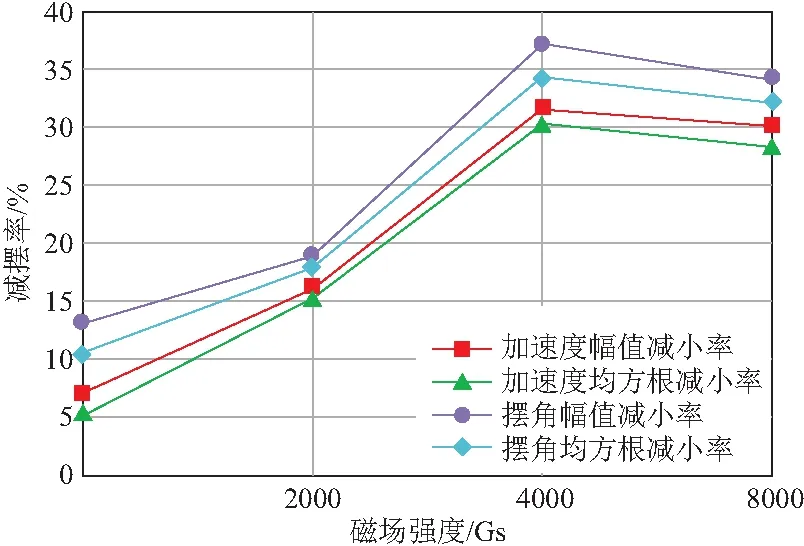
图7 不同磁场强度ENES的减摆效果
从图7可以看出,在自由振动下,当质量块中不附加磁铁,阻尼仅仅只靠轨道与ENES质量块间的摩擦时,ENES对吊物系统加速度和摆角的控制效果均非常有限,随着磁场增强,阻尼增大,控制效果加强,但当阻尼过大时,控制效果反而减弱。分析其原因主要是:ENES的耗能机制主要为电涡流阻尼,若ENES阻尼过小时,消耗能量较小;当ENES阻尼过大时,质量块受力较大,在轨道中行程过短,耗能也会随之减少。在自由振动激励下,不同阻尼大小ENES对吊钩摆角的控制效果仍然优于对吊钩加速度的控制效果。
2.2 简谐激励
在简谐激励试验中,通过六自由度振动平台输入振幅为0.01 m,频率为0.35 Hz(吊物系统模型自振频率附近)的正弦波,吊物系统模型与ENES的初始状态为自由静止,其他参数与自由振动时一致。试验测得质量比2%、磁场强度8000 Gs,时域和频域内吊钩摆角响应如图8,9所示。
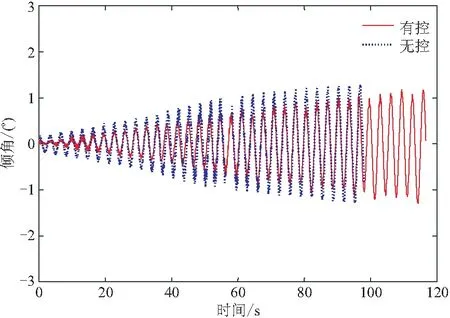
图8 倾角时程对比图(质量比2%)
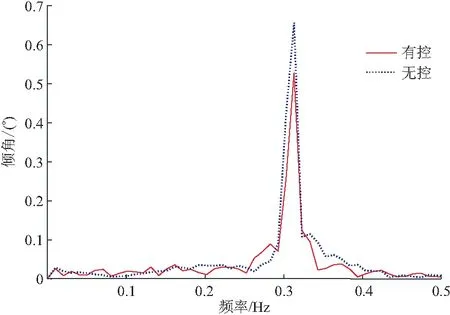
图9 倾角傅里叶频谱(质量比2%)
电涡流阻尼磁场强度为2000 Gs,不同质量比下,电涡流NES对吊钩加速度和摆角幅值以及均方根控制效果如表4所示。磁场强度4000,8000 Gs情况下试验数据所得规律性与表4相同,此处不再列出。

表4 简谐激励下不同质量比ENES的减摆效果 %
从表4可以看出,在简谐激励下,当质量比从2%增大到16%时,ENES对吊钩加速度和摆角的幅值和均方根值控制效果均有所提高,对摆角的控制效果比对加速度好,且对幅值的控制效果优于对均方根的控制效果,与自由振动结论一致。
通过与自由振动对比,发现ENES在简谐激励下的控制效果略差于自由振动工况。将质量比为8%的试验数据进行整理,得到不同阻尼大小下ENES对吊钩加速度和摆角幅值以及均方根的控制效果。具体试验结果列于表5,趋势线如图10所示。
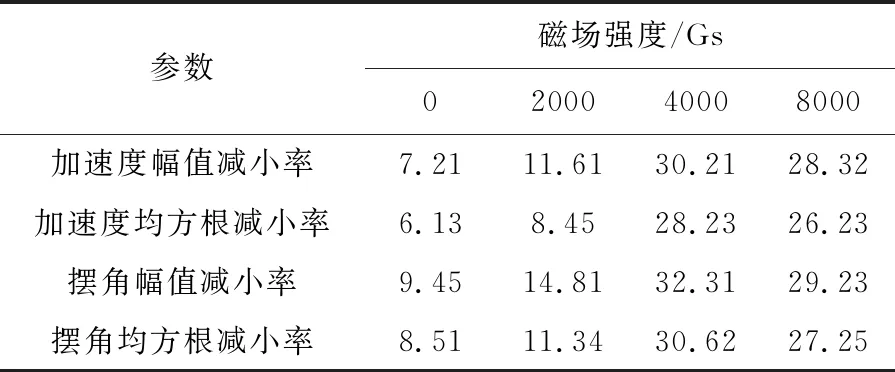
表5 不同磁场强度ENES的减摆效果 %
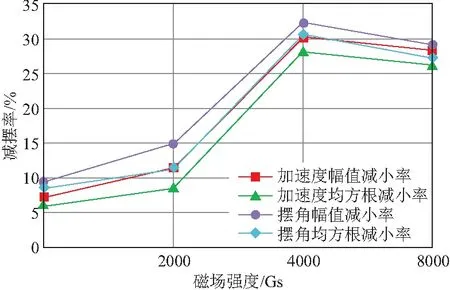
图10 不同磁场强度的ENES的减摆效果
从图10可以看出,在简谐激励下,ENES的控制效果随着阻尼的增大先增大后变小,且对摆角的控制效果优于对加速度的控制效果。与自由振动对比,简谐激励下的控制效果也略差于自由振动工况。
3 结论与展望
本文通过吊物系统缩尺模型的自由振动与振动台试验,系统研究了新型ENES的被动减摆性能。ENES在不同质量比和阻尼大小下对吊物系统吊钩摆动过程中的加速度和摆角均有一定的控制效果,且对幅值的控制效果略优于对均方根值的控制效果。试验结果还表明,ENES对吊物系统吊钩加速度幅值和均方根值的最大减摆效果分别为31.58%,30.32%;对吊物系统摆角幅值和均方根值的最大减摆效果分别为37.22%,34.31%。其次,在自由振动下ENES的控制效果要优于在简谐激励下的控制效果。
通过实验观察,初步探明了ENES减摆效果与其参数的规律:ENES的控制效果随着质量比的增大而增大,但超过一定质量比后,ENES控制效果增大并不明显;随着阻尼的增大先增大后减小,即存在最优阻尼参数。
限于篇幅,本文聚焦于试验研究及探明ENES参数与减摆效果间的规律。但是,ENES减摆的理论分析和模拟仿真同样具有重要意义,其最优轨道函数及最优参数还需要进一步明确,特别是ENES对不同频率吊物系统的减摆鲁棒性问题更值得进一步深入研究。