基于不确定传感器状态的机载系统多层故障诊断方法
2021-07-07石健王少萍罗雪松
石健,王少萍,罗雪松
1. 北京航空航天大学 自动化科学与电气工程学院,北京 100191
2. 北京航空航天大学 宁波创新研究院,宁波 315800
2018—2019年的两起波音737MAX飞机坠机事故不仅造成了346名乘客罹难的灾难性后果,而且给航空巨头波音公司带来了极大的负面影响,造成了不可估量的损失。通过事故调查发现:两起事故均是由于攻角(AoA)传感器故障导致机动特性增强系统(MCAS)一系列错误操作引起的[1-2]。由此,飞机机载传感器的可靠性与故障诊断问题再次受到了航空界的广泛关注。
实际上,机载传感器故障一直是严重影响航空安全的关键问题之一。从传感器故障原因上分析,传感器的故障在数据获取、信号处理和诊断决策3个阶段产生,且各阶段都存在硬件限制、算法局限和外部不确定环境等多种潜在故障因素[3-4]。因此,降低单一传感器的故障率存在瓶颈。此外,传感器误报警故障(NFF)占到飞机飞行过程故障记录的85%,并耗费飞机总维护成本的90%[5]。因此,在飞行过程中正确识别机载传感器的状态,及时隔离故障传感器并维持对机载系统本身的准确监测成为保证飞行安全的一项关键内容。
当前在机载传感器故障识别方面主要通过余度传感器之间的交叉比较[6-8],以及模型自监控[9-12]2种方式来实现。由于存在共因故障,余度传感器之间的交叉比较并非总能有效隔离故障的传感器,比如尽管波音737MAX飞机上同时安装有2套AoA传感器,仍无法避免传感器的故障给检测系统带来的误判引发事故。基于模型自监控的有效性主要依赖于模型本身的精确性,故障识别结果容易受到噪声等内外部因素影响。
近年来,学者研究了基于多源信息融合的故障识别方法[13-15]。文献[16]提出了基于复合证据距离的多源信息融合故障诊断方法并将其用于航空液压泵的故障识别中,有效提高了故障识别准确度。文献[17]提出了一种基于多源信息融合的航空发动机故障诊断算法,该算法将发动机各种监测信息通过不同的神经网络诊断结果在特征层融合,然后通过D-S证据理论在决策层进行综合,最后给出诊断结果。然而当前的基于多源信息融合的故障识别方法侧重于采用局部传感器的检测特征。由于机载传感器(如压力传感器、流量传感器、温度传感器、振动传感器等)往往受到多重极端环境条件(振动、冲击、极限温度等)影响其工作状态,因此单一传感器本身的输出结果置信度难以保证。此外,共因/共模故障也导致在局部系统的传统冗余备份传感器有可能同时失效,如波音737MAX案例中2套攻角传感器就同时因为低温而冻结。这些传感器带来的不确定因素均会导致故障诊断系统在推理过程中做出错误的判断。
针对上述传感器信息本身不确定性问题,本文采用体系化建模思路,充分利用机载系统中不同层级、不同区域传感器检测特征之间的关联关系,通过贝叶斯网络建立起其概率推理模型,考虑单个传感器本身存在的不确定性,构建传感器信息前向融合与反向校验相结合的分层诊断决策方法,提升系统故障诊断的精度。
1 基于传感器信息分层融合的故障诊断算法
根据系统的定义:系统是由相互作用相互依赖的若干组成部分结合而成的,具有特定功能的有机整体[18]。对于复杂机载系统来讲,系统中各部分之间的相互作用和相互依赖关系将各组件的状态紧密联系在一起,即某一传感器的检测结果既包含了检测点局部的信号特征,也反映了检测点上下游区域特征。因此,通过合理构造故障诊断层级,充分利用检测特征间的关联关系,不仅可以扩展故障检测的信号维度,提高系统故障诊断的识别粒度,而且可以通过检测特征间的交叉校验准确识别传感器自身的故障,并在系统级的融合中对其影响加以规避。
本方法是基于贝叶斯网络,将实际复杂系统根据物理架构进行分层,并逐层构建贝叶斯概率模型,最底层即为传感器的实际检测模型。由于本模型讨论的是传感器信息流在层级间的传递和融合校验,故假设各传感器的实测数据已经过信号处理并已提取为故障特征,各特征以状态空间和概率的数学形式在本模型中传递。
1.1 传感器检测模型


图1 传感器检测模型
根据传感器的检测模型可知,传感器的观测结果同时受到LRU的实际状态以及传感器本身的不确定状态共同影响。给定该传感器检测状态的似然函数L(S(k),M(k)|O(k)),根据贝叶斯网络计算公式可以得到联合概率分布为
P(S(k),M(k),O(k))=
(1)
(2)

(3)

(4)

(5)
根据上述模型和算法,第k层单传感器的状态估计以及基于该传感器的LRU状态估计过程如图2所示。
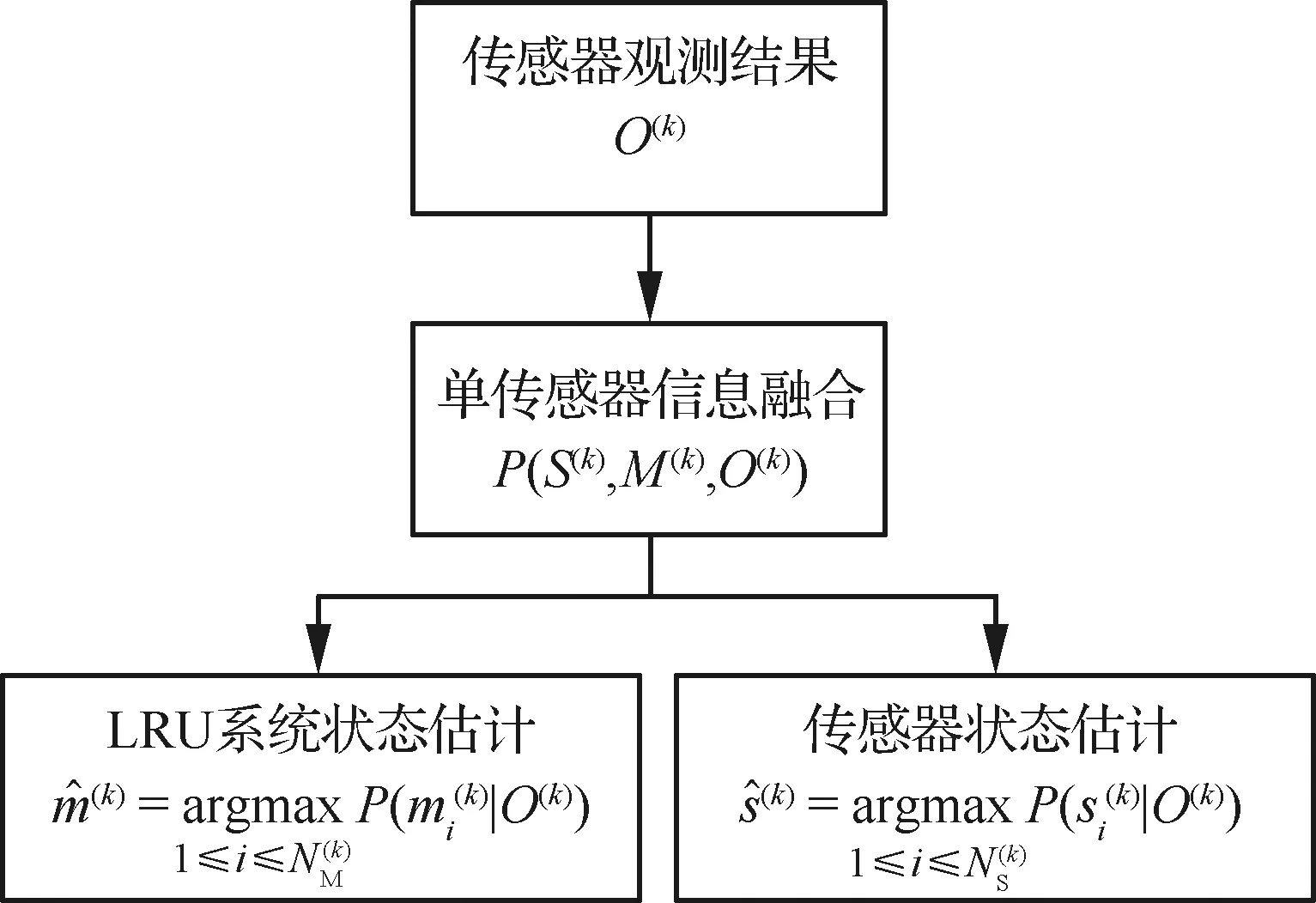
图2 传感器和LRU状态估计过程

1.2 多层系统状态融合模型

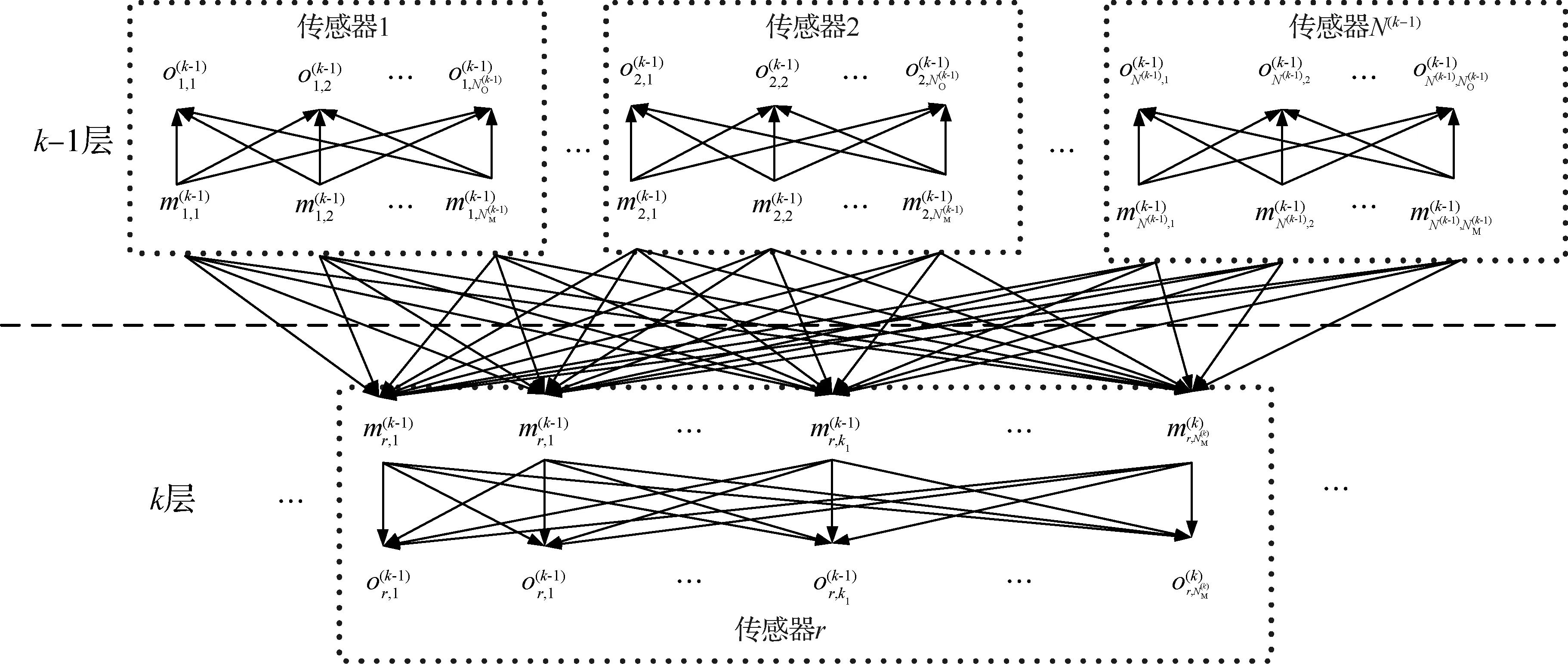
图3 多层系统状态融合模型
(6)

(7)
在式(7)的基础上,可进一步利用贝叶斯网络计算公式写出多层系统状态融合模型的联合概率分布关系为
(8)

(9)

(10)

(11)

(12)
根据上述模型和算法,融合第k-1层和第k层传感器的观测结果,对第k层系统状态的前向估计过程以及对k-1层的系统状态的反向校验过程如图4所示。至此,已完成了系统状态估计的递推关系,该模型可以对不考虑传感器状态的多层故障诊断系统证据融合过程进行建模。
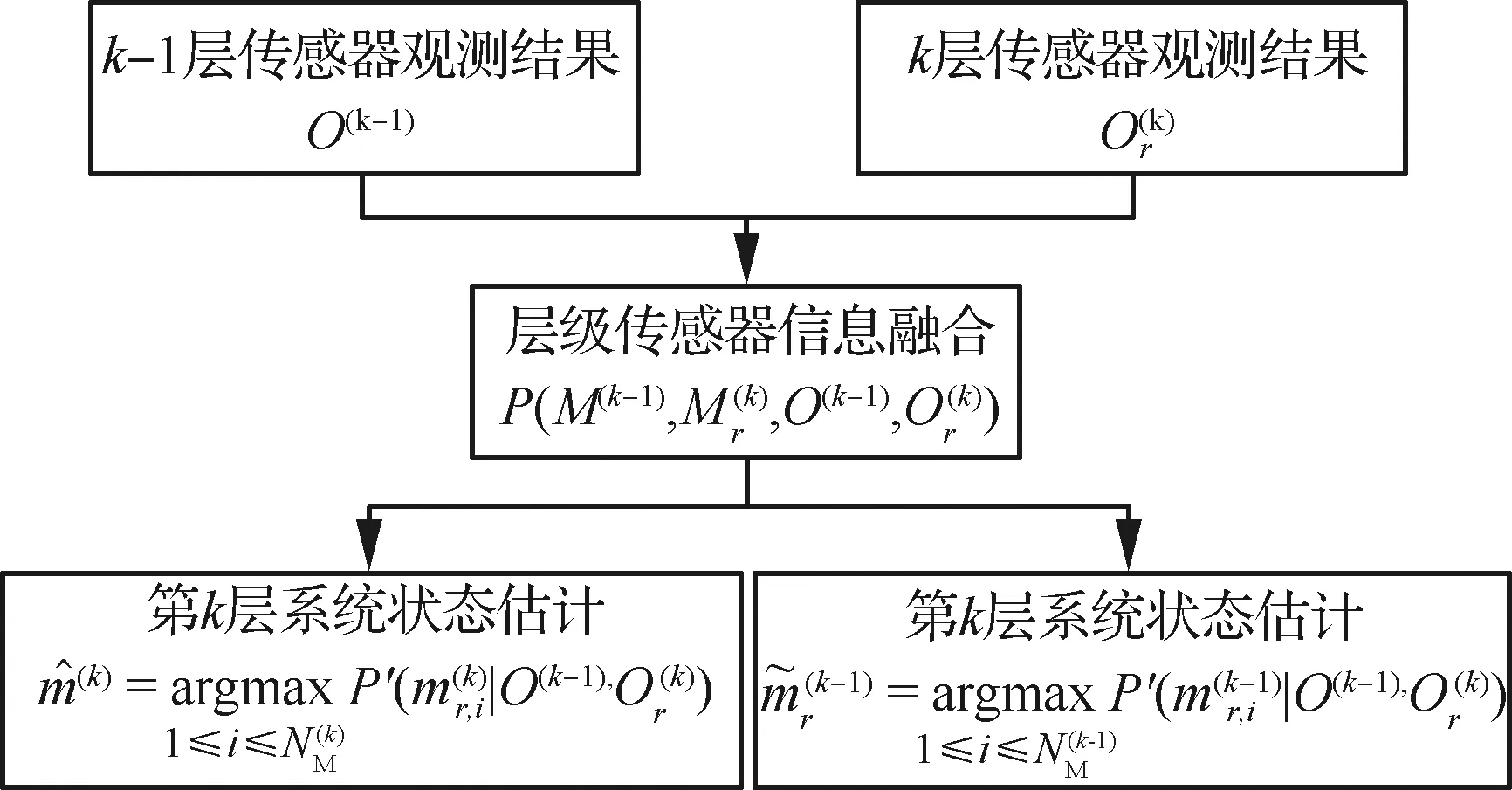
图4 多层系统状态估计过程
1.3 多层传感器状态融合模型
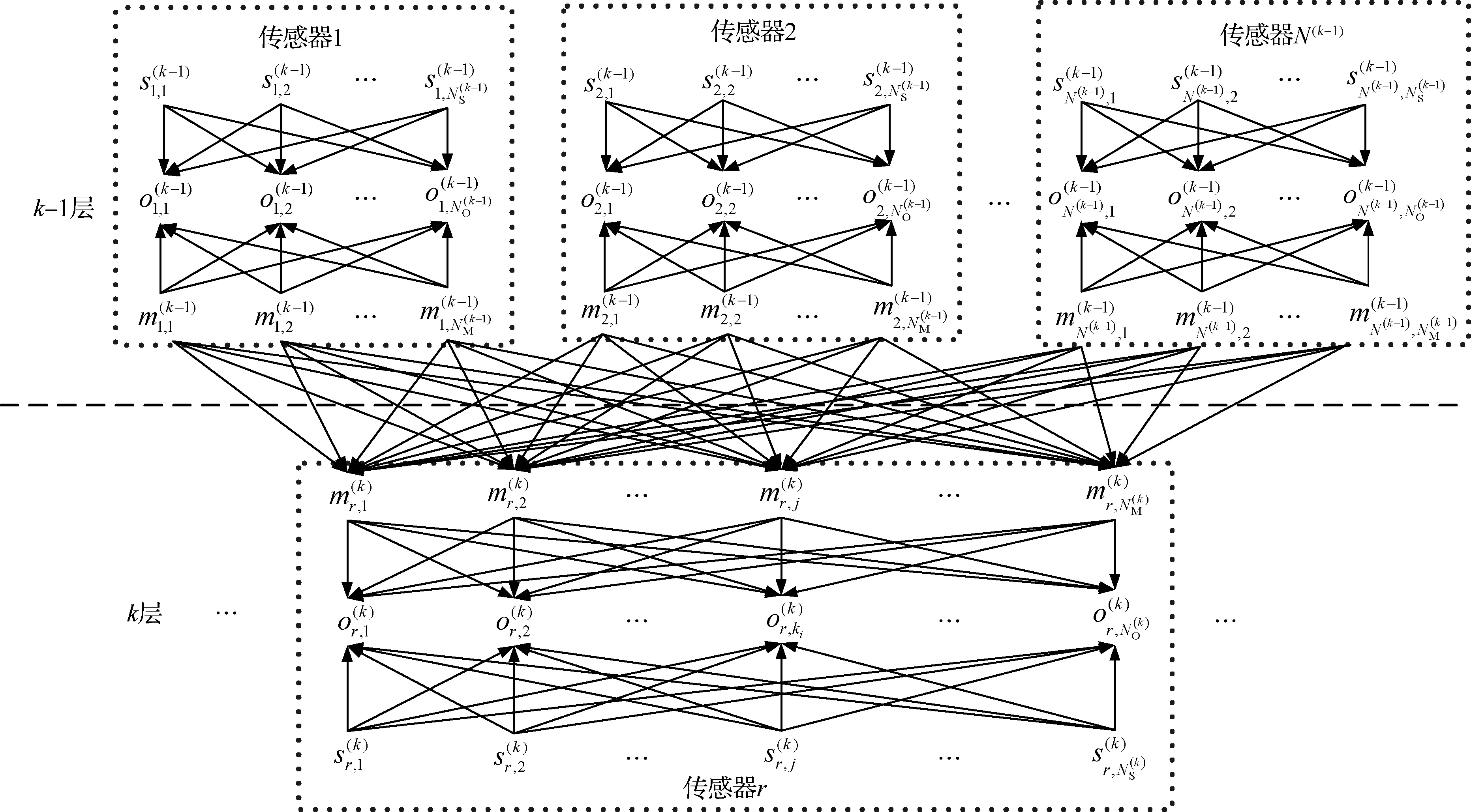
图5 多层传感器状态融合模型


(13)
(14)

(15)
(16)
(17)

(18)
(19)


(20)


(21)
根据上述模型和算法,融合第k-1层和第k层传感器的观测结果,对第k层系统状态和传感器状态的前向估计过程以及对k-1层的系统状态和传感器状态的反向校验过程如图6所示。至此,我们完成了考虑传感器不确定性的多层故障诊断系统状态估计和校验的递推关系,可以对考虑传感器不确定状态的多层故障诊断系统传感器信息融合模型进行建模。
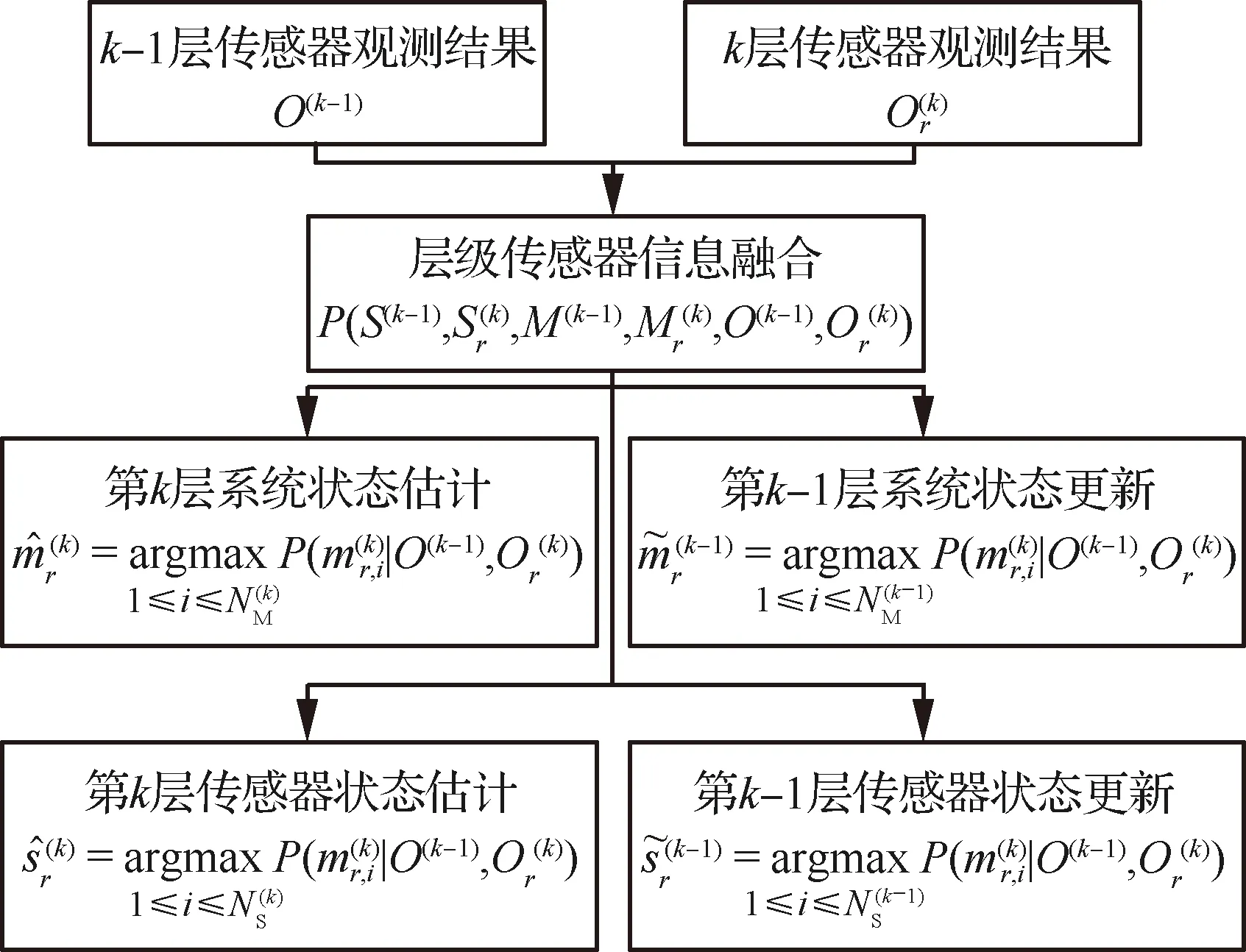
图6 多层传感器信息融合过程
根据此模型,利用复杂故障诊断系统中多传感器之间的耦合关系,可以逐层估计和校验系统状态与传感器状态,提高故障诊断系统的准确率,降低因单一传感器故障率或者共因共模原因导致的某一类传感器故障对系统故障诊断推理的影响,充分融合传感器的个体信息与系统模型的整体信息,发挥复杂机载系统传感器的裕度资源优势,以保证故障诊断系统的可靠运行。
2 机载系统的多层诊断模型构建
以飞机机载系统为例,考虑传感器不确定性的分层传感器信息融合多层故障诊断架构如图7所示。整个故障诊断架构可分为部件级、分系统级、系统级和飞控级。
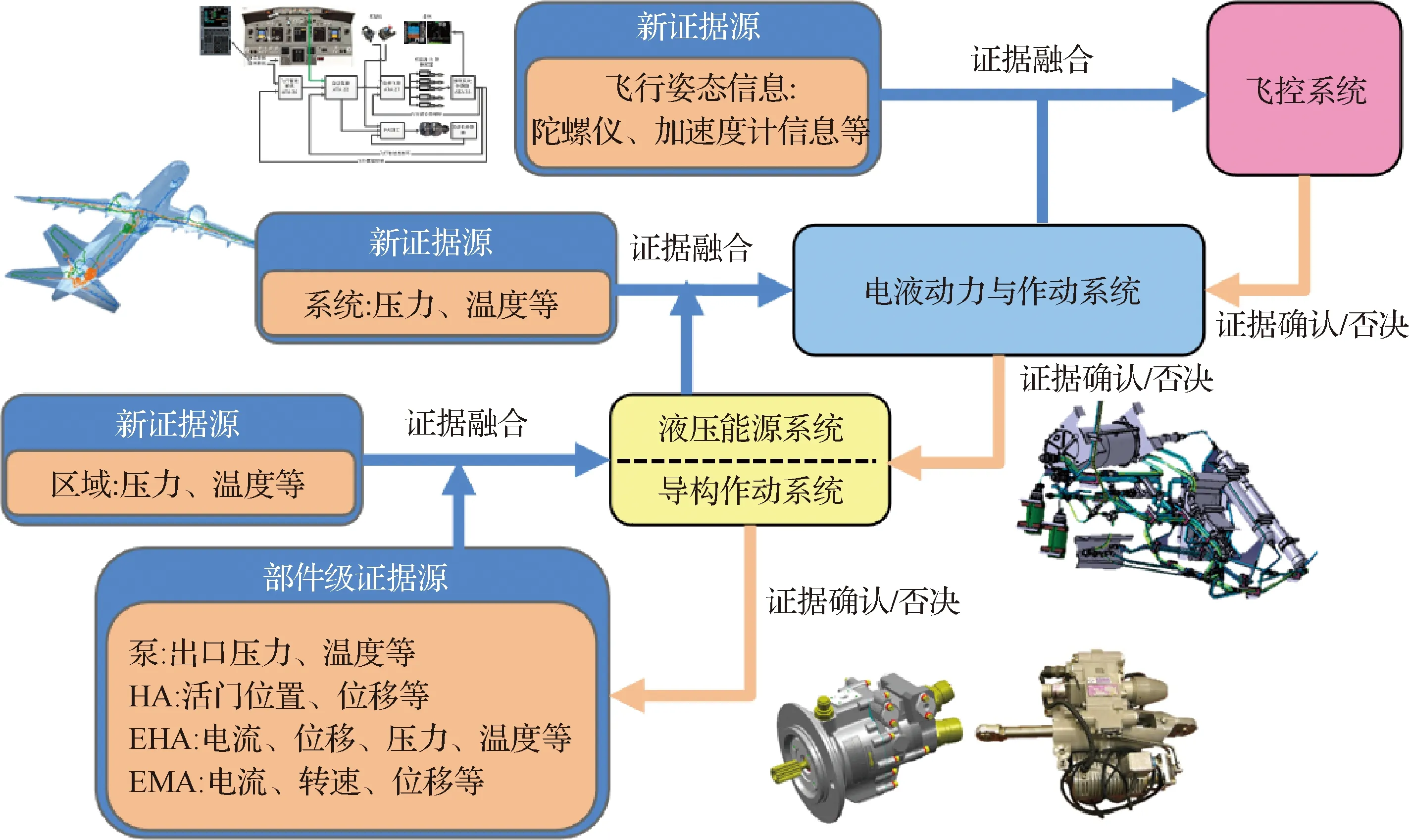
图7 机载系统分层传感器信息融合故障检测架构
在机载系统分层传感器信息融合故障检测架构中,每一区域的传感器不仅融合该区域内及下一层传感器的检测特征,同时对所有传感器检测结果进行校验,从而充分考虑单一传感器的不确定性,实现传感器信息前向融合与反向校验相结合的系统状态估计。基于分层传感器信息融合的故障识别算法,整个机载系统故障诊断及传感器状态识别系统的工作流程架构如图8所示。
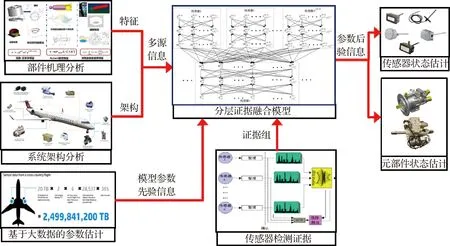
图8 机载传感器故障诊断系统
本文提出的基于不确定传感器状态的机载系统多层故障诊断算法在具体执行时的流程如图9所示。首先通过历史故障数据库,计算分层故障诊断模型的先验概率和似然函数;然后将系统各层级不同传感器的数据进行结构化处理,变成故障诊断模型可以运算的状态概率信息流;通过前向融合和反向检验,得到系统状态和传感器状态的估计;最终将新的故障诊断结果存入故障数据库。
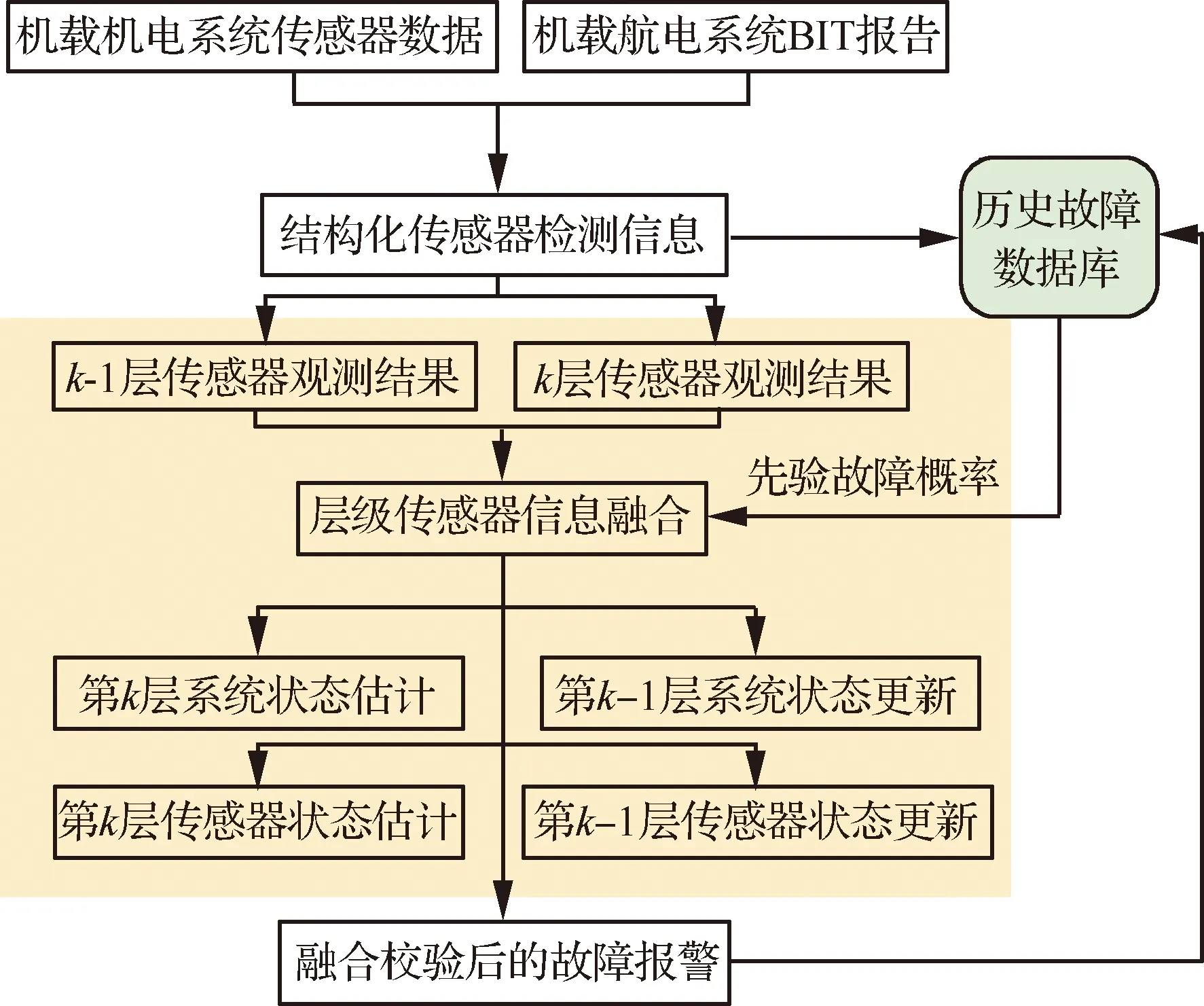
图9 机载系统多层故障诊断算法流程
构建机载系统故障诊断及传感器状态识别系统的基本过程包括区域传感器检测特征映射、分层传感器信息融合、基于飞行数据记录仪(FDR)的模型训练3个阶段。
2.1 区域传感器检测特征映射
区域传感器检测特征映射实现系统区域状态到传感器检测状态的映射关系,即建立图2所示的传感器检测模型。该模型的输入是传感器检测到的各个状态。各传感器信息以结构化的状态空间和概率的数学形式在各层模型中传递。具体来说,若是机载电子系统,则其底层传感器的数据类型为BIT检测结果,表征为二进制的正常或故障状态;若是机载机电系统,则其底层传感器的数据(如压力、速度、角度等)经过信号处理、特征提取、阈值判断后,表征为正常、偏高、或偏低等离散状态。同时通过历史故障数据的积累,可以得到在历史故障中各个传感器状态、LRU状态及其传感器报警历史数据的概率统计并计算其先验函数。该模型的分析结果为分层诊断模型提供最底层的传感器信息流,用作上层的传感器信息融合和反向校验。
通常,构建区域传感器检测特征映射模型的方式包括基于失效物理的机理映射模型[19]和基于数据驱动的检测映射模型(如BP神经网络等)。
2.2 分层传感器信息融合
分层传感器信息融合实现层级之间传感器检测结果的交叉校验。由图3和图5可知,层级之间传感器检测信息交叉校验是通过层级之间系统的状态传递过程实现的。因此分层传感器信息融合的核心是构建系统状态传递模型。
在构建系统状态传递模型过程中,需同时考虑系统架构,以及系统中信号和能量的传递过程。例如文献[20]基于异构作动系统的能量传递过程建立了故障状态传播模型如图10所示。
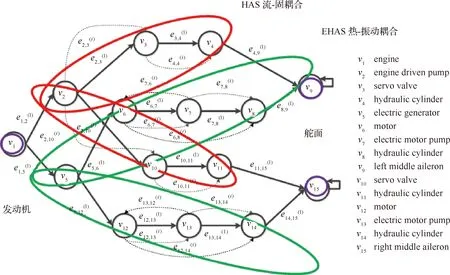
图10 异构作动系统的系统故障状态传播模型[21]
利用该模型中状态间的传递和耦合关系,可以实现HA、EHA,以及能源系统的区域传感器检测传感器信息的融合。
2.3 基于FDR的模型训练
基于FDR的模型训练用于为分层传感器信息融合模型提供先验信息。根据系统复杂程度和分析层级,分层传感器信息融合模型存在大量的不确定信息,该信息只有通过大量的数据统计和训练实现参数的辨识。当前空客、波音、BAE等积累了大量的FDR数据可用于模型的训练。
例如针对民机自动驾驶系统结构组成,构建的传感器故障诊断模型如图11所示。
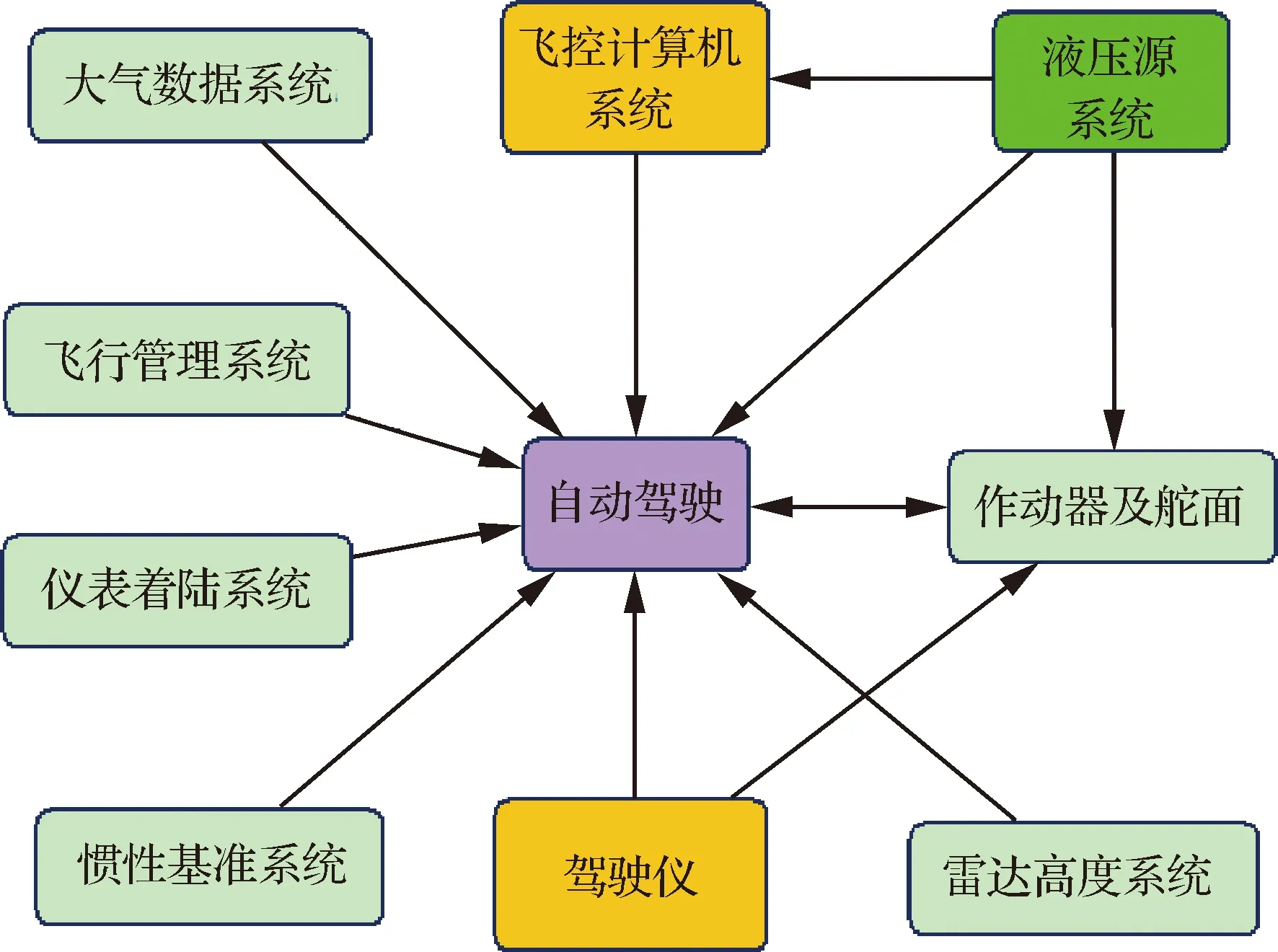
图11 自动驾驶分层传感器信息融合模型
该模型中共有712个节点实现4层299个传感器/BIT的传感器检测信息融合,各检测点如表1所示。
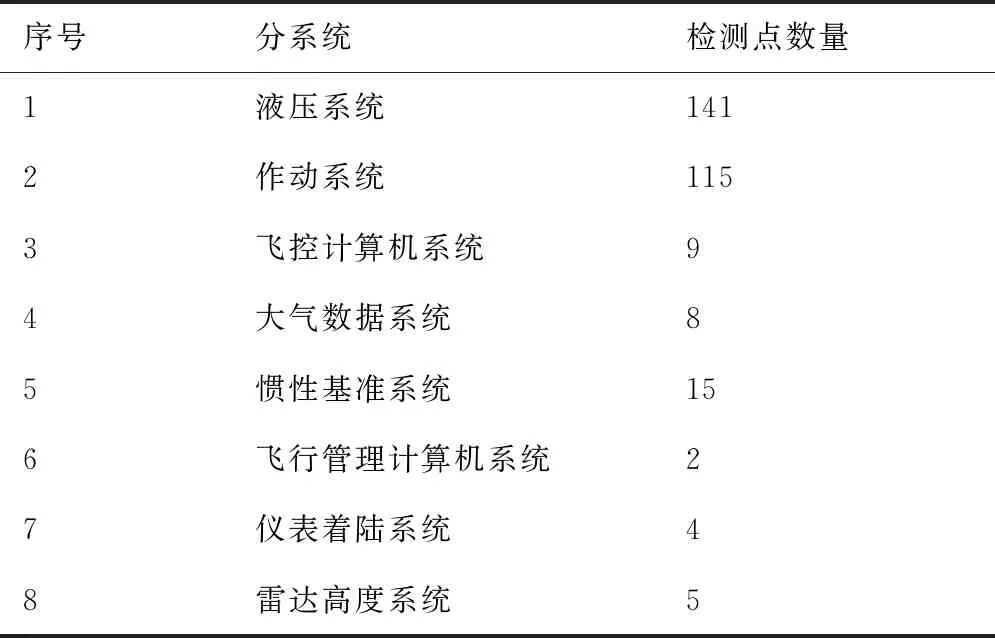
表1 自动驾驶检测传感器信息
对该模型的训练可采用BAE-146支线客机175 570架次的FDR离线数据进行训练,通过充分训练,该模型可用于飞控系统的诊断。
3 案例分析
3.1 多层机载系统案例描述
本文针对某型民机1#液压系统地面试验台(如图12所示)构建分层传感器信息融合的发动机驱动泵(EDP)通道传感器诊断系统用于验证本文算法的有效性。
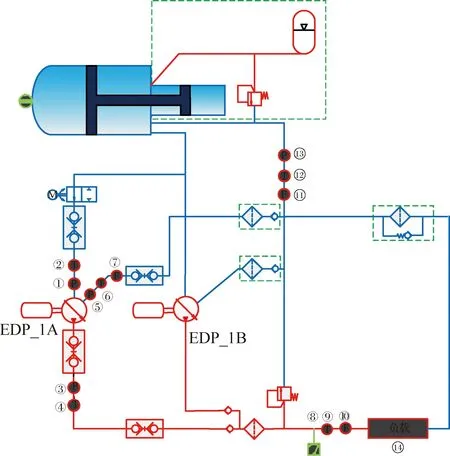
图12 1#液压系统地面试验台
在上述模型中,传感器的类型如表2所示。依据该案例对象构建的3层机载系统模型层级定义如表3说示。
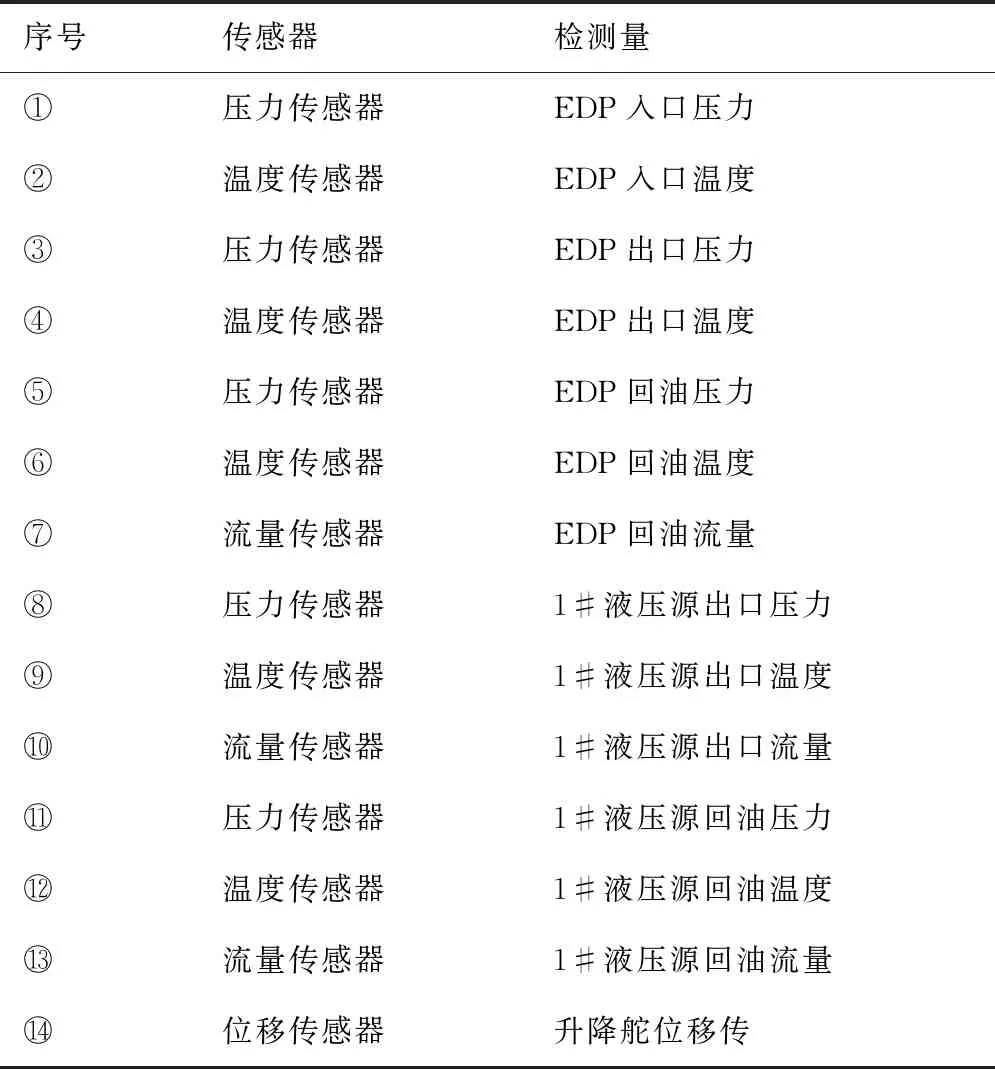
表2 1#液压系统传感器类型
将上述传感器进行分层融合,如表3所示。
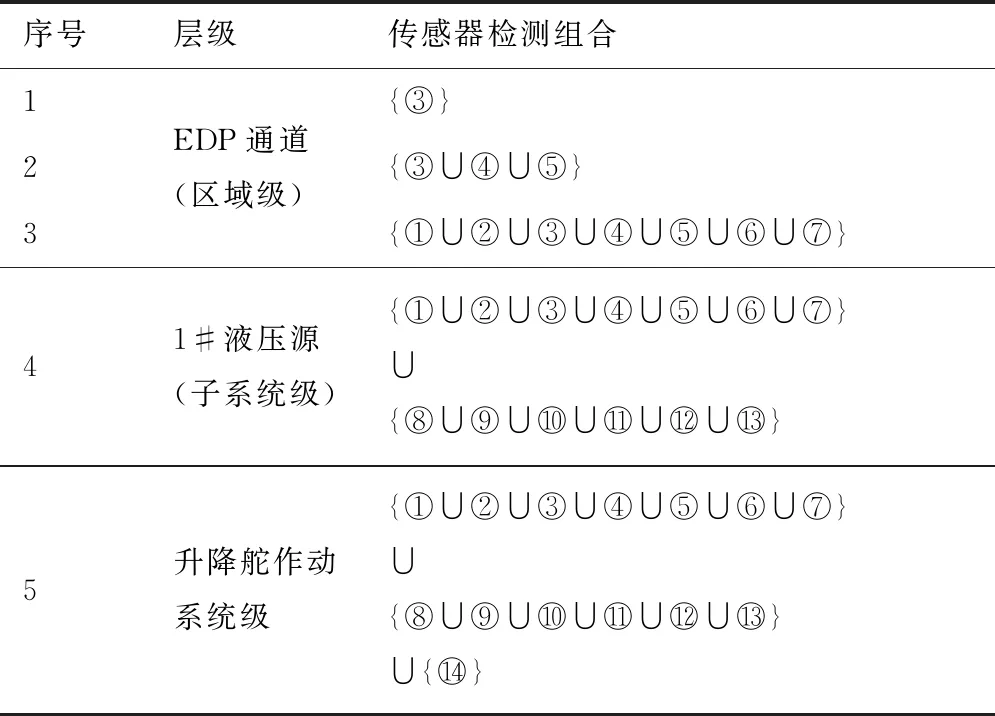
表3 1#液压系统传感器检测传感器信息融合层次
3.2 EDP通道区域级传感器状态融合模型
EDP通道包含液压泵(EDP_1A)、开关阀(Switch_Valve1)、泵入口液压接头(Inlet_Valve)、泵出口液压接头(Outlet_Valve)、高压安全阀(Relief_Valve),以及泵回油液压油滤(Return_Filter)组成。
EDP通道各部件的状态定义如表4所示所示。
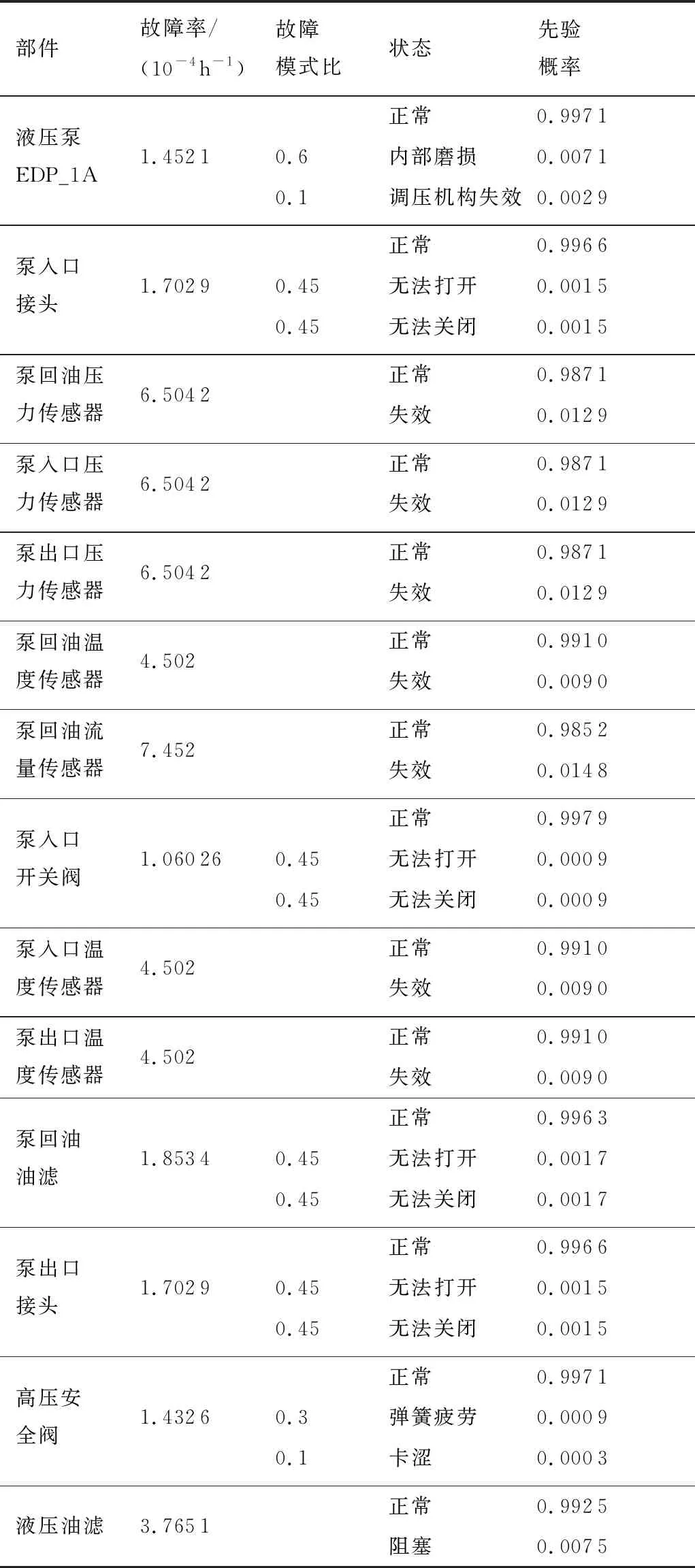
表4 EDP通道各部件的状态定义
部件的故障率通过文献[21-22]得到。在本案例中,假设飞机的飞行时间为20 h,根据指数失效率模型,得到部件各状态的先验概率。
通过故障机理分析,得到部件状态与传感器检测状态之间的相关关系,如表5所示。
在表5中,“↓”表示部件的状态导致相应的传感器检测结果与正常值相比偏低;“↑”表示部件的状态导致相应的传感器检测结果与正常值相比偏高;“--”表示部件的状态对传感器检测结果不会产生明显影响。基于上述分析,建立EDP通道区域传感器检测传感器信息融合模型如图13所示。
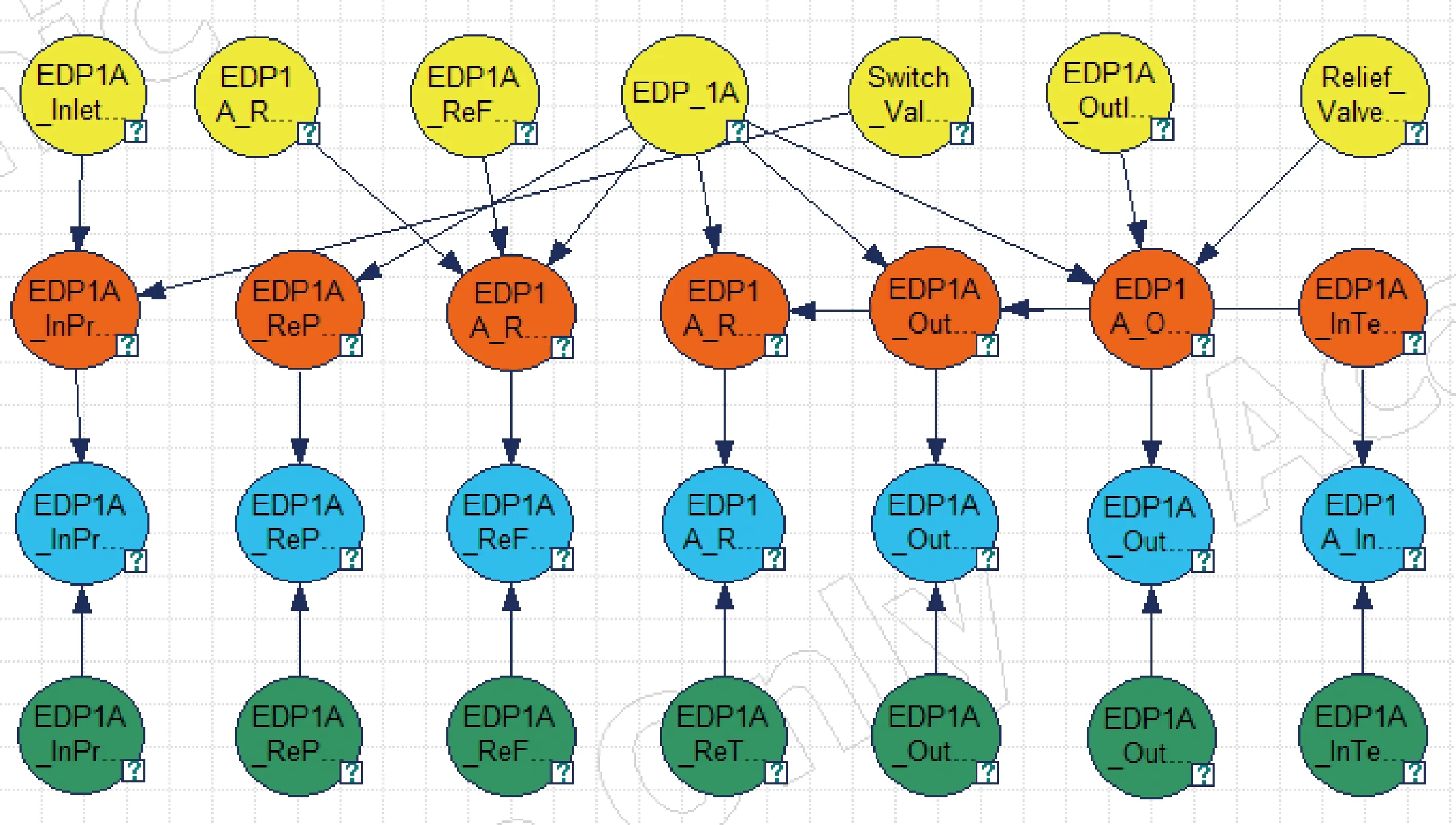
图13 EDP通道区域传感器检测信息融合模型
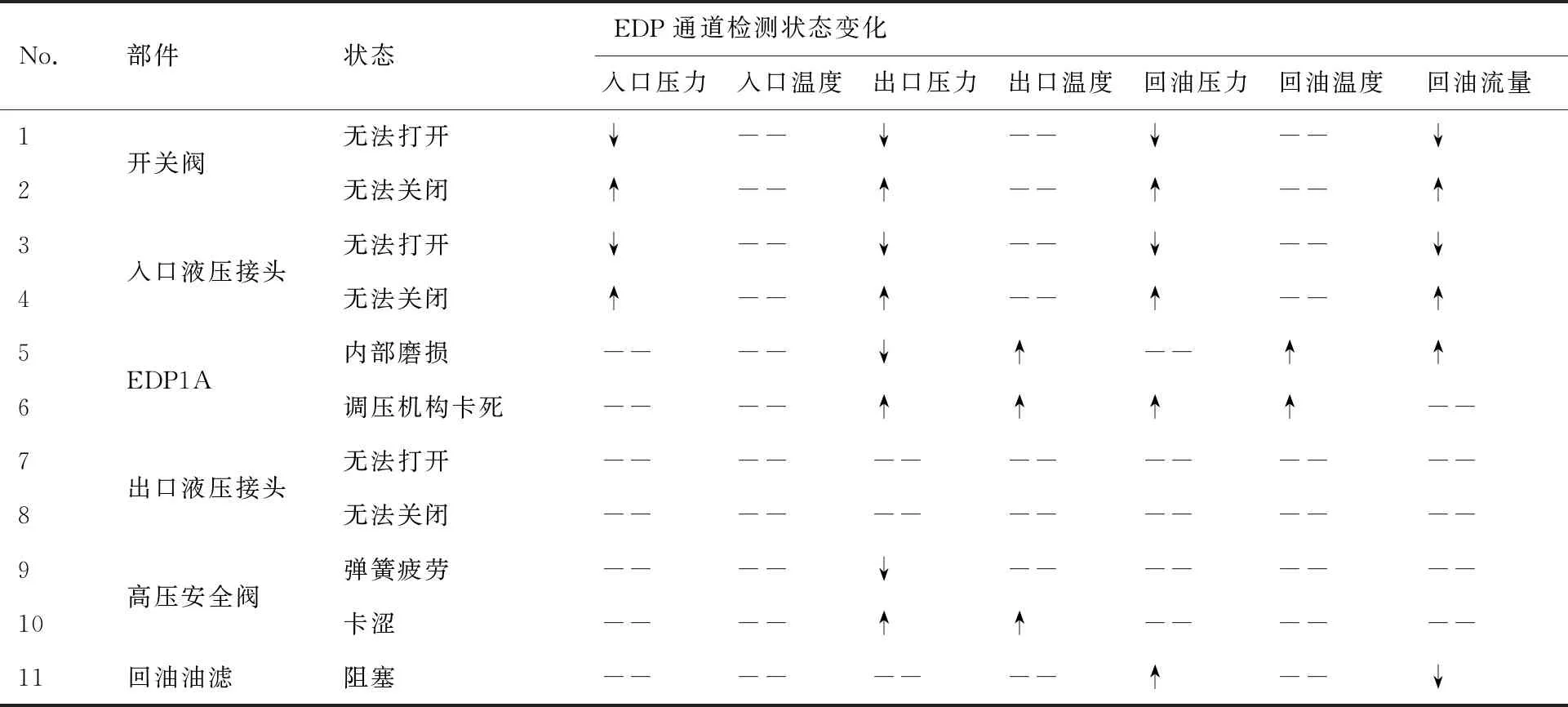
表5 部件状态与传感器检测状态之间的相关关系
在上述模型中,黄色节点表示EDP通道中设备(如液压泵、安全阀等)的状态(子设备是否故障);红色节点表示系统中设备状态决定的系统的内部状态(系统是否故障);绿色节点表示区域传感器的状态(传感器是否故障);蓝色节点表示传感器的检测结果(下同)。由图12可以发现,系统内部状态之间存在着耦合和传递关系。因此,系统内部状态同时在多个传感器的检测信号上有所反映。这为传感器检测结果间的交叉校验提供了基本的依据。
上述模型使用GeNie软件进行解算,给定传感器检测信息为
# (①) = 正常;#(②) = 正常;#(③) = 偏高;#(④) = 正常;#(⑤) = 正常;#(⑥) = 正常;#(⑦) = 正常;
计算结果如图14所示。
上述结果表明,在液压泵附近的7个传感器检测结果中,仅有出口压力传感器检测偏高,其他6个传感器的检测结果正常的情况下,通过融合各传感器的检测信息,以0.746的把握可以确定是泵出口压力传感器故障,而非回路中部件的故障(由图14中可以发现,各部件的故障后验概率均小于0.1)。
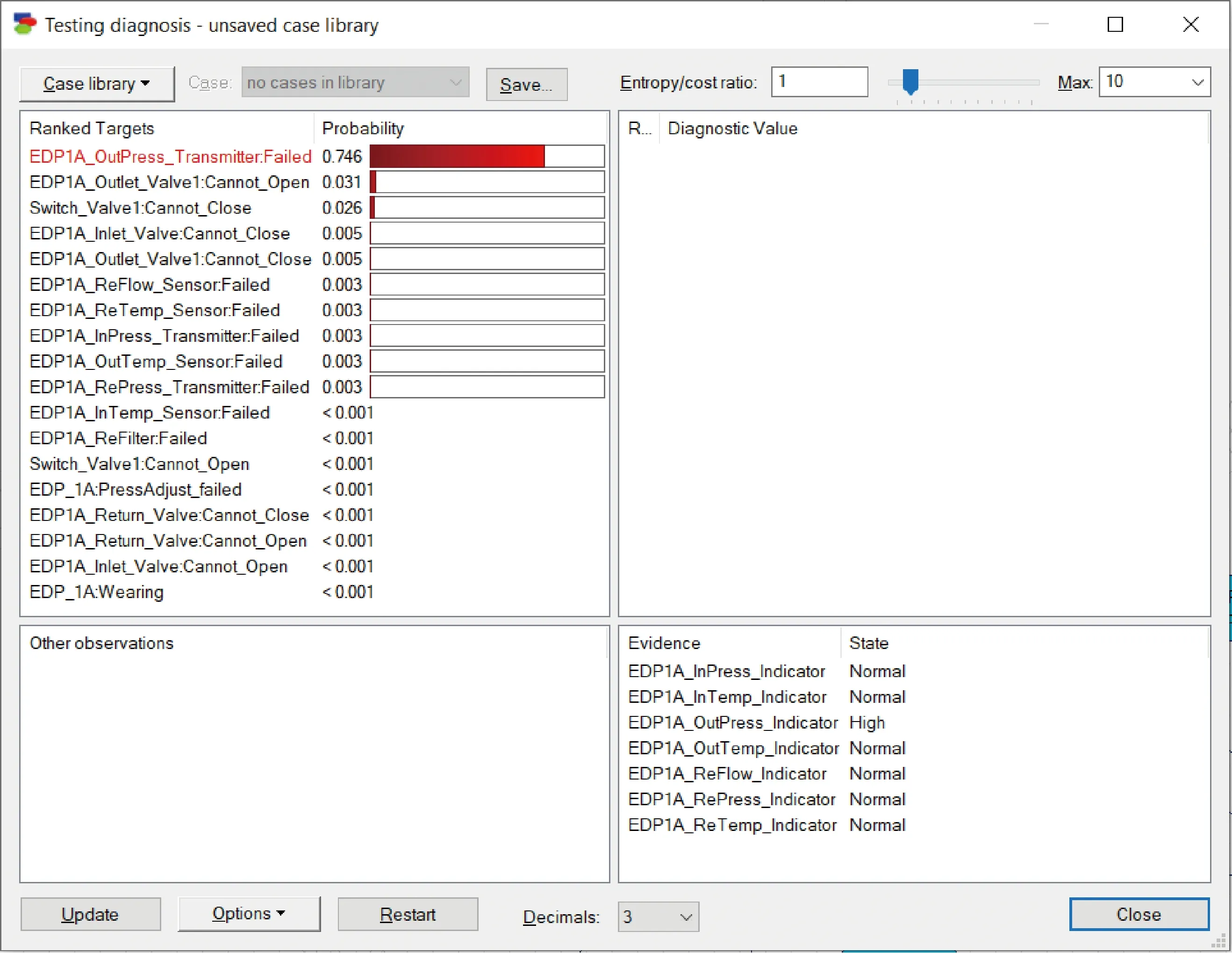
图14 模型解算结果
通过进一步仿真发现,在不同传感器检测传感器信息融合后,系统故障诊断结果如表4所示。
由表6可知,第4组传感器检测传感器信息融合可以以0.999 9的置信度隔离出EDP故障。融合第1组传感器检测结果可以隔离出EDP出口压力传感器故障,即本组检测结果中,EDP出口压力偏低的检测结果为传感器检测错误结果,此时的报警事件为EDP出口压力偏低虚警。同样的,第2组检测结果中,以0.843和0.764的置信度确定为泵入口压力传感器和泵出口压力传感器故障导致的虚警事件。第3组检测结果中,融合各传感器的检测结果,发现存在3种故障可能性,且每种故障诊断结果的置信度偏低,且诊断结果的置信度差值小于20%,因此无法准确定位故障。需要更多的检测传感器信息。
图15给出了EDP通道区域传感器融合诊断的不确定度与传感器可靠度之间的关系。
由图15可知,尽管通过提升检测传感器的可靠性可以降低故障诊断的不确定性,但是由于区域传感器易受区域环境条件共同影响,因此检测传感器信息之间的独立性存在限制。因此需要更多独立性的检测传感器信息进行诊断定位。
3.3 1#液压源级传感器状态融合模型
与EDP通道的建模过程类似,图16给出了升降舵作动系统级传感器检测传感器信息融合模型。
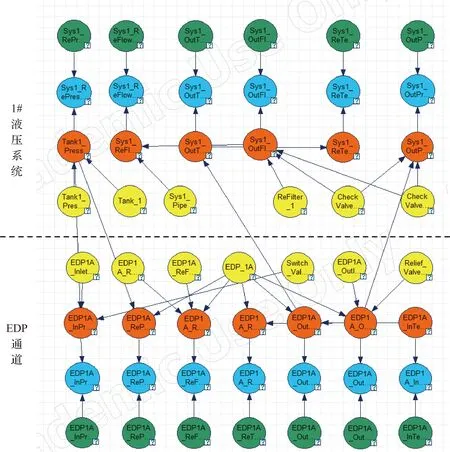
图16 系统级传感器检测信息融合模型
针对表6中的第3组检测结果,通过增加1#液压系统级传感器,得到检测传感器信息融合结果如表7所示。
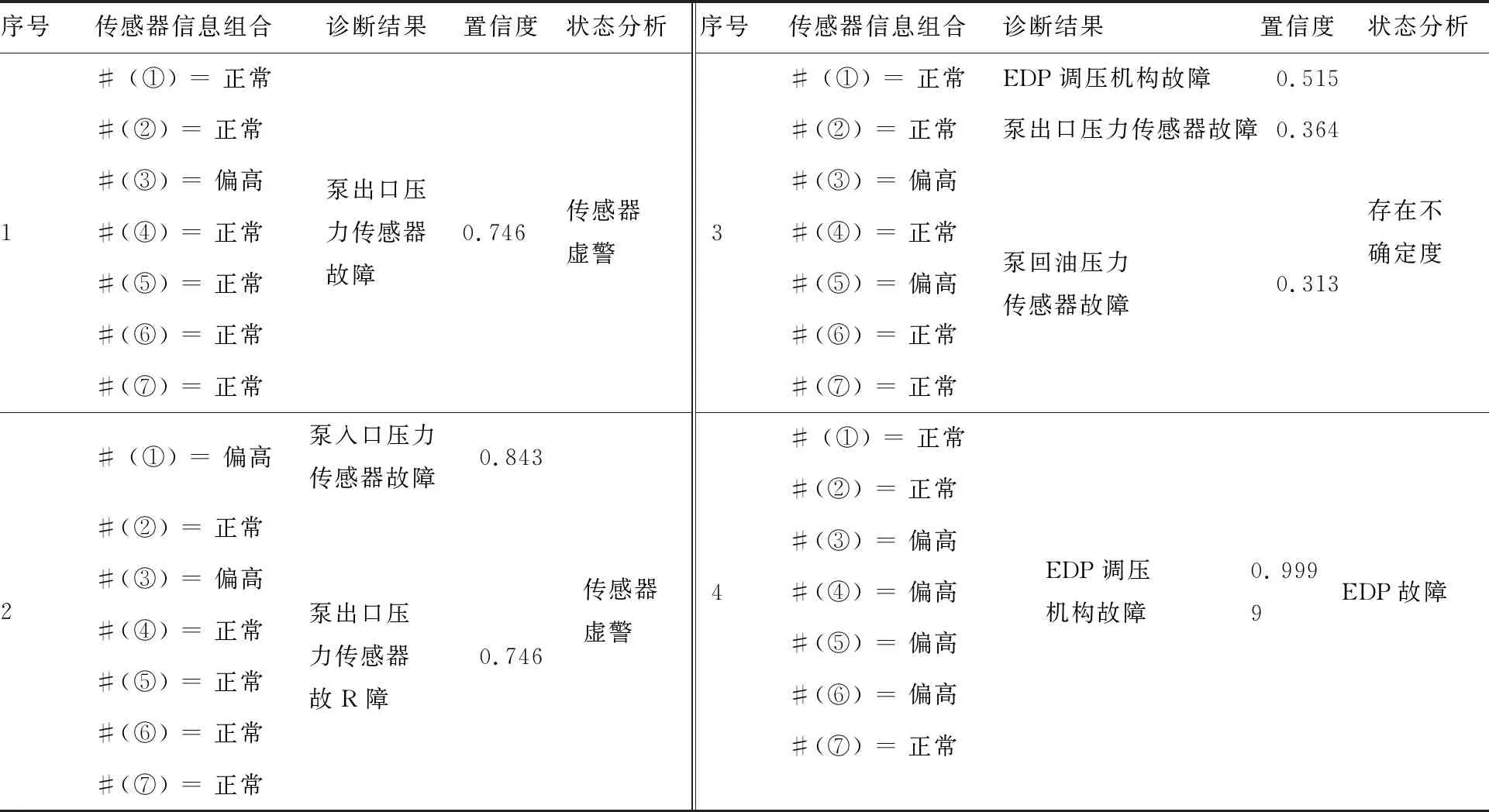
表6 EDP通道传感器传感器信息融合结果
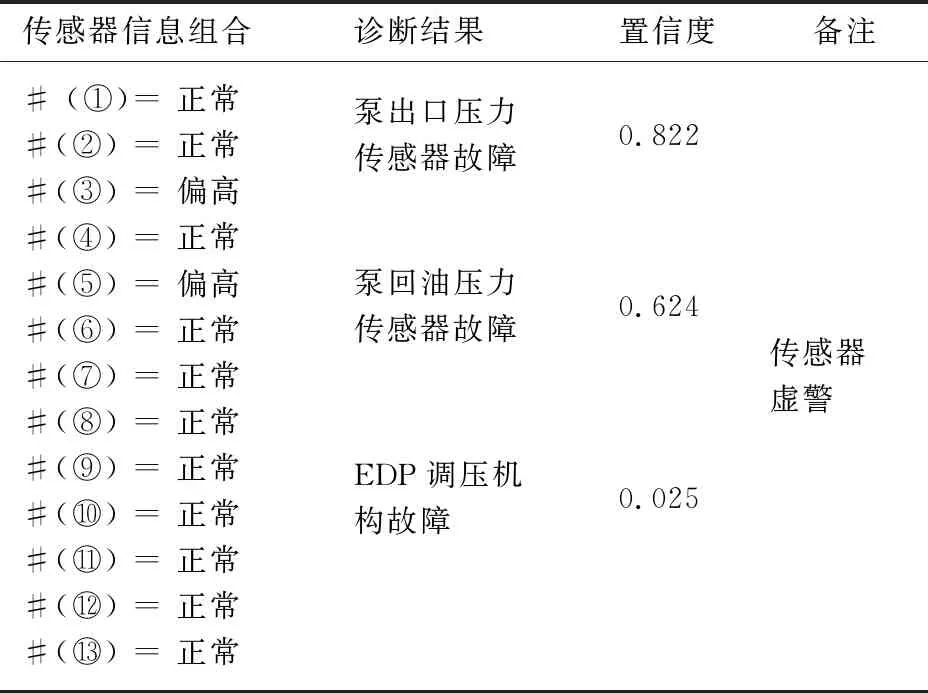
表7 1#液压源传感器检测传感器信息融合
由表7可知,在EDP通道中无法进行故障识别的3种故障通过融合1#液压系统级的6个传感器的检测结果可以排除EDP调压机构故障的可能性。因此可以确认该组检测结果导致的系统告警事件是由传感器故障导致的虚警事件。从而实现了层级之间检测传感器信息的交叉校验。
3.4 液压作动系统传感器信息融合
同理,通过融合升降舵作动器的位移传感器检测结果可以进一步提高检测信号维度,提高故障诊断的粒度。液压作动系统传感器信息融合模型如图17所示。

图17 液压作动系统传感器信息融合模型
通过不同层级之间传感器检测传感器信息的融合,可有效降低传感器故障导致的虚警发生概率,如图18所示。
图18中5组传感器信息融合分别对应表3所示的五组传感器检测组合。通过进一步分析发现:
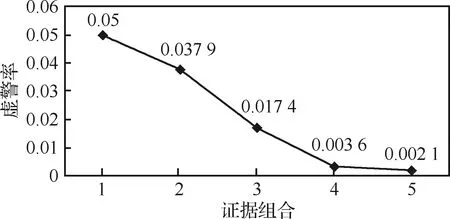
图18 层级传感器检测传感器信息融合效果
1) 部件级传感器信息融合降低了泵出口压力传感器65.2%的虚警率。
2) 区域级传感器信息融合降低了泵出口压力传感器92.8%的虚警率。
3) 系统级传感器信息融合降低了泵出口压力传感器95.8%的虚警率。
因此,基于分层传感器信息融合的传感器故障诊断方法可有效提高故障诊断的准确性。
4 结 论
1) 提出了基于多层传感器信息融合的故障诊断方法,构建了传感器信息前向融合和反向校验模型,克服了故障诊断中传感器状态不确定给系统状态评估带来的影响。
2) 给出了机载系统实现多层故障诊断的架构,指出并实现了基于传感器不确定状态的机载系统故障诊断流程。
3) 用机载液压系统地面试验台验证了多层传感器融合模型的故障诊断对传感器不确定状态的断鲁棒性,证明了多层传感器信息融合在传感器故障识别中的有效性。
