舵面破损对飞机轴间运动耦合飞行品质的影响
2021-07-07殷海鹏王立新乐挺刘海良张喆尤俊彬
殷海鹏,王立新,乐挺,刘海良,*,张喆,尤俊彬
1. 北京航空航天大学 航空科学与工程学院,北京 100191
2. 中国飞行试验研究院,西安 710089
当电传控制飞机在作战时受到航炮或导弹攻击后,升降舵或副翼可能会破损,使飞机的气动外形不再左右对称,从而产生轴间耦合运动,也即飞机俯仰轴的运动会引起其滚转或偏航轴的运动响应,滚转或偏航轴的运动也会引起俯仰轴的运动响应。在作战任务中,由于驾驶员主要操纵升降舵与副翼,分别控制飞机俯仰轴与滚转轴的运动,完成截获、跟踪等飞行任务;方向舵作为辅助操纵面,主要用于消除飞机滚转时的侧滑运动。显然,俯仰轴与滚转轴是机动任务中的主要运动轴,由舵面破损引起的俯仰-滚转轴间耦合运动会增加飞行员的操纵负担,使飞机的飞行品质变差,严重时甚至会危及飞行安全。因此,舵面破损后,驾驶员需根据损伤状况、战场态势等因素选择继续执行任务或脱离战场。此时,判断飞机是否具有完成既定飞行任务的能力是决策的重要依据,也即判断受损后飞机的飞行品质是否能够满足作战任务的要求。
飞行品质规范如GJB 185—86[1]与MIL-HDBK-1797A[2]对战斗机俯仰-滚转轴间运动耦合飞行品质的要求为在滚转角达360°的空战机动中,需保证由滚转运动引起的俯仰运动可控,且不影响该机动的战术效果。显然,该要求难以量化评定飞机轴间运动耦合飞行品质的等级。规范中的其他评定方法与条款只能应用于每次评定飞机一个轴向的飞行品质,无法同时评定飞机的俯仰-滚转轴间运动耦合的飞行品质。因此,有必要研究电传控制飞机俯仰-滚转轴间运动耦合飞行品质的评定方法以及舵面破损对飞机飞行品质的影响。
针对此问题,国际上的相关研究主要集中于飞机舵面破损后的气动特性分析[3-4]、故障诊断[5-6]与容错控制设计[7-8]。中国的张欣和吕新波分析了升降舵故障对民机飞行安全的影响[9];丛斌等研究了飞翼舵面故障时操纵效能的变化规律[10];刘小雄等分析了副翼破损对飞机飞行包线的影响[11]。
本文采用基于任务的飞行品质评定方法[12-13]研究升降舵或副翼破损对角速率指令式电传控制飞机轴间运动耦合飞行品质的量化影响。首先,选取能够反映飞机多轴运动耦合特性的机动任务;分析舵面破损对飞机气动特性的影响,建立舵面破损飞机的飞行动力学模型,进而搭建飞行品质评定地面模拟试验平台;选取能够表征飞机轴间运动耦合程度的飞行品质评定参数,形成基于任务的角速率指令式电传控制飞机轴间运动耦合飞行品质的评定方法。然后,针对具有不同舵面破损程度的飞机,采用建立的评定方法分别开展飞行品质评估试验。最后,基于大量的试验结果,研究升降舵或副翼破损情形下影响飞机飞行品质的因素,并提出能够量化舵面破损对飞机飞行品质影响的特征参数取值规律,以期为舵面破损情形下飞机的飞行安全与作战效能评估等提供分析方法与理论参考。
1 基于任务的飞机轴间运动耦合飞行品质评定方法
1.1 评估机动任务选取
在开展基于任务的飞行品质评估试验时,首先需选取用于评定飞行品质的机动任务,该任务不仅要与实际机动动作相关,其完成效果还应与飞机的多轴运动耦合特性有关。通过分析相关文献中的飞行品质评估机动动作[14-15],选取多轴平显跟踪作为舵面发生破损故障时,评定飞机飞行品质的机动任务。
多轴平显跟踪机动任务要求试验驾驶员使用平视显示器(HUD)上的瞄准环与参考线跟踪时变的俯仰与滚转姿态指令,该机动可以模拟空战中对目标机进行精确跟踪的作战情形。起始时试验机作定直平飞,任务开始后,试验驾驶员根据平显上命令条给出的俯仰与滚转姿态指令,通过操纵驾驶杆快速捕获与跟踪该指令,使命令条中心点进入平显画面上的瞄准环内,同时尽量消除参考线与命令条在滚转轴方向上的角度误差,如图1所示。平显上的命令条按照预先设定的俯仰与滚转姿态指令变化,整个机动过程持续130 s[16]。
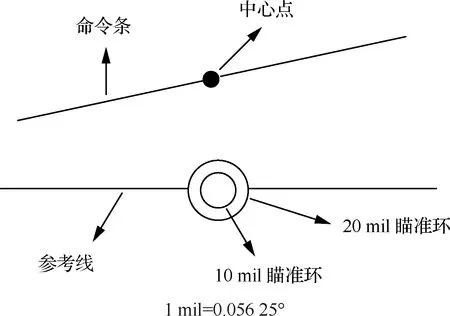
图1 多轴HUD跟踪任务
在此任务中,驾驶员需要同时进行俯仰与滚转操纵,精确地控制试验机的多轴运动姿态。因此该任务能够充分反映试验机的俯仰-滚转轴间运动耦合特性对其姿态精确控制能力的影响,从而便于暴露舵面破损试验机轴间运动耦合带来的飞行品质问题。
1.2 任务性能标准制定
飞机完成评估机动任务的飞行品质等级由驾驶员与试飞工程师结合任务的完成效果与驾驶员的飞行感受,依据库珀-哈珀评分表(Cooper-Harper Rating,CHR)进行定量评定[2]。对于任务完成效果的评定标准,需要综合考虑任务难度及与飞行品质等级的对应关系而制定。多轴平显跟踪任务的完成效果表现为飞机对多轴组合姿态指令的跟踪精度。文献[16]给出了任务完成效果的评定标准,如表1所示。标准分为“满意的”、“一般的”与“无法完成”。
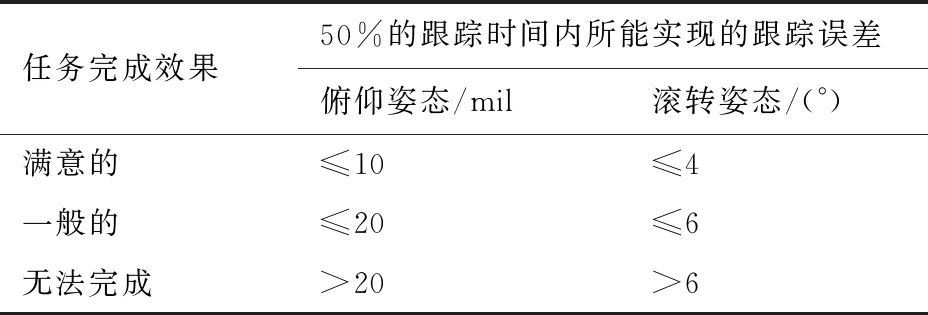
表1 多轴HUD跟踪任务性能标准
该任务要求驾驶员通过俯仰操纵,使用HUD上的10 mil或20 mil瞄准环捕获命令条中心点,因此俯仰轴跟踪误差的单位为密位;针对滚
转轴,要求驾驶员使用参考线对齐命令条,因此滚转轴跟踪误差的单位为度[16]。
1.3 舵面破损飞机飞行动力学建模
为计算舵面破损情形下飞机的运动响应,需要建立相应的飞行动力学模型。飞机的轴间耦合运动由其气动外形不对称引起,因此,研究时假设破损的升降舵或副翼处于飞机机体纵向对称面的一侧。同侧的升降舵与副翼一起破损时,两个破损舵面引起的不对称效应会叠加,从而可提高飞机不对称效应的强度。升降舵或副翼破损主要会影响飞机的气动特性,具体表征为以下3个方面。
1.3.1 舵面操纵效能下降
首先,定义升降舵破损比例系数ke为升降舵破损面积占其总面积的比例,其取值范围为0~0.5,ke取0表示升降舵未破损,ke取0.5表示飞机机体纵向对称面一侧的升降舵全部破损。定义副翼破损比例系数ka为单侧副翼破损面积占副翼总面积的比例,其取值范围为0~0.5,ka取0表示副翼未破损,ka取0.5表示单侧副翼全部破损。
相同舵面偏角下,破损面积越大,其产生的操纵力矩越小。研究时可假设舵面产生的操纵力矩与其剩余面积成正比[17]。则升降舵破损状态下的俯仰轴操纵导数Cmδe将变为无故障时的1.0-ke倍;副翼破损状态下的滚转轴操纵导数Clδa将变为无故障时的1.0-ka倍。
1.3.2 产生运动耦合力矩[18]
运动耦合力矩是指舵面破损后,由于飞机机体气动外形不对称,当俯仰轴存在角速度时引起的作用于滚转轴与偏航轴的气动力矩,当滚转轴或偏航轴存在角速度时引起的作用于俯仰轴的气动力矩。基于对文献[4,19]中的飞机机翼破损引起的运动耦合力矩建模方法的分析,升降舵或副翼破损引起的运动耦合力矩可表示为
(1)
式中:Lq为俯仰角速度q引起的作用于滚转轴的运动耦合力矩;Nq为q引起的作用于偏航轴的运动耦合力矩;Mpr为滚转角速度p与偏航角速度r引起的作用于俯仰轴的运动耦合力矩;ρ为空气密度;V为飞行速度;S为机翼面积;b为展长;c为弦长;Clqe、Cnqe、Cmpe与Cmre为飞机纵向对称面一侧升降舵全部破损时的运动耦合力矩导数,以升降舵破损时俯仰角速度引起的滚转力矩系数Clqe为例说明,Cl代表滚转力矩系数,下标q代表俯仰角速度,下标e代表升降舵;Clqa、Cnqa、Cmpa与Cmra为单侧副翼全部破损时的运动耦合力矩导数。
1.3.3 产生操纵耦合力矩
当飞机纵向对称面一侧的升降舵破损后,升降舵偏转时飞机对称面两侧的升力、阻力变化量均不相等,因此会产生作用于滚转轴与偏航轴的操纵耦合力矩Lδe与Nδe;类似地,当单侧副翼破损后,会产生作用于俯仰轴的操纵耦合力矩Mδa。操纵耦合力矩可表示为
(2)
式中:Clδe与Cnδe为飞机纵向对称面一侧升降舵全部破损时的操纵耦合力矩导数;Cmδa为单侧副翼全部破损时的操纵耦合力矩导数;Δδe和Δδa分别为升降舵和副翼偏角变化量。
综上,基于无故障飞机非线性六自由度动力学方程[20]修改气动模型中的升降舵或副翼的操纵导数,并在飞机转动动力学方程中加入运动与操纵耦合力矩,即可建立升降舵或副翼破损情形的飞机飞行动力学模型。通过调整ke与ka,可改变飞机的舵面操纵效能与轴间耦合力矩的大小,进而使飞机轴间运动耦合程度发生变化。
基于F-16战斗机的总体与气动数据[21-22]建立了舵面破损情形下的飞机飞行动力学模型,作为飞行品质评估试验研究的基础。
1.4 飞机飞行控制律设计
为保证算例飞机无故障时可在多轴平显跟踪任务中获得满意的任务完成效果,设计了模型参考动态逆飞行控制律[23-25],控制律的结构如图2所示。
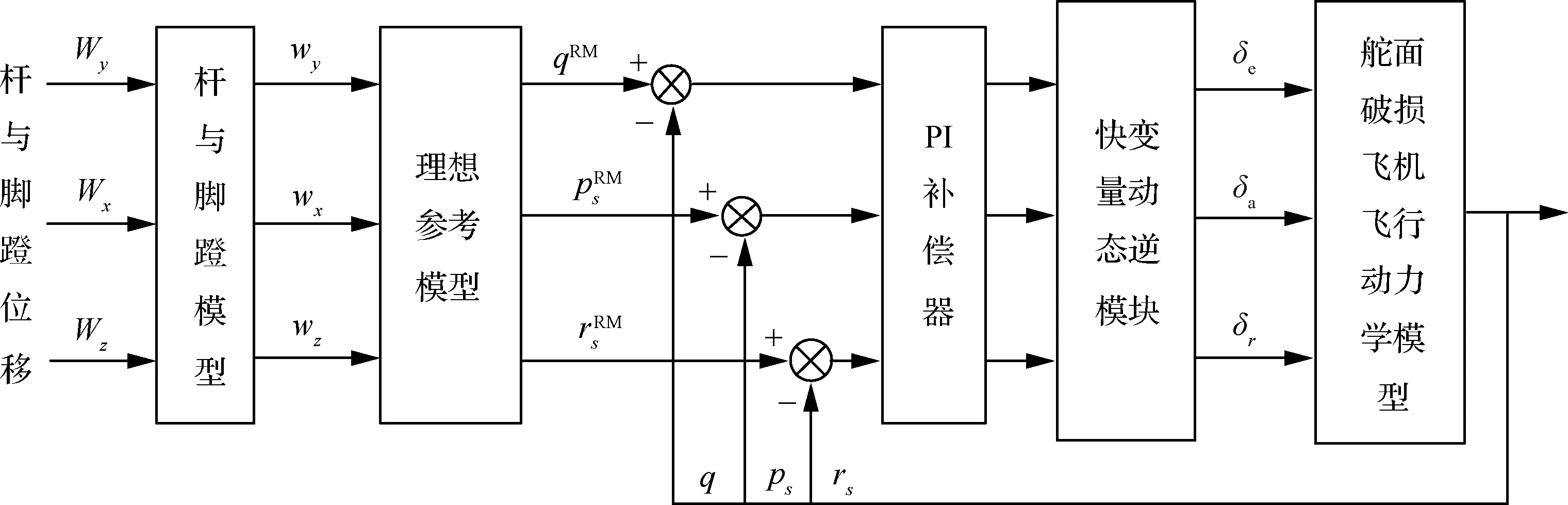
图2 模型参考动态逆飞行控制律结构
参照MIL-HDBK-1797A品质规范[2]中给出的等效系统短周期传递函数,试验飞机俯仰轴参考模型可以表示为
(3)
式中:Kq为俯仰轴等效系统增益;s为稳定轴坐标;ωsp为短周期频率;ξsp为短周期阻尼比;CAP为操纵期望参数;g为重力加速度。
滚转轴参考模型取为滚转模态低阶等效传递函数:
(4)
式中:Kp为滚转轴等效系统增益;ωp为滚转模态带宽。
偏航轴参考模型[12]可以表示为
(5)
式中:Kny为侧向过载增益;Kz为操纵指令增益;ny为侧向过载;φ和θ分别为滚转角与俯仰角;Tr为偏航轴理想时间常数。
根据文献[16]的研究结论,当Kq=5.5、ωsp=5.5 rad/s、ξsp=1.5、CAP=1、Kp=120、ωp=8 rad/s、Kny=15、Kz=1、Tr=0.33 s时,F-16 战斗机具有较好的操纵响应特性,在多轴平显跟踪任务中,可以达到1级飞行品质。
1.5 飞行品质评定地面模拟试验平台搭建
为开展飞行品质评估试验,需要建立地面模拟试验平台。基于MATLAB/Simulink中的可视化仿真接口模块,结合FlightGear开源飞行模拟软件开发了飞行品质评定地面模拟试验平台[26]。该平台由操纵输入设备、飞行仿真系统与视景仿真系统3部分构成,其结构如图3所示。操纵输入设备包含油门杆、操纵杆、脚蹬等操纵通道,操纵杆为侧杆布局,输出杆位移信号。
由图3可见,操纵输入设备将驾驶员给出的杆指令传送至飞行控制律模块,该模块采用模型参考动态逆飞行控制律计算舵面的偏角,作为舵面破损飞机动力学模型的输入;可视化仿真接口将试验机飞行速度、姿态、过载等参数的计算结果与姿态目标指令实时传送至视景仿真系统;根据这些信息,飞行仿真引擎模块可显示飞行视景;驾驶员根据视景中姿态角的跟踪误差操纵杆与脚蹬。

图3 飞行品质评定地面模拟试验平台结构
1.6 轴间运动耦合飞行品质特征参数确定
舵面破损比例系数ke与ka对轴间运动耦合特性的影响因飞机展长、转动惯量等参数的不同而有差别,也即对于不同的飞机,该系数与其轴间耦合运动幅度之间的关系也不相同。因此,ke与ka不适合作为轴间运动耦合飞行品质的评定参数。通过研究,参照旋翼机飞行品质规范ADS-33E-PRF[27]中用于表征俯仰-滚转运动耦合程度的参数p/q与q/p,提出用这两个频域参数表征舵面破损对飞机飞行品质的影响。
p/q为俯仰输入引起的滚转角速度响应幅频曲线在一特定频段内的平均值与俯仰角速度响应幅频曲线在该频段内的平均值之比。p/q主要关注作用于滚转轴的耦合运动响应的幅度,根据ADS-33E-PRF[27],该频段取为由副翼输入引起的滚转角频域响应的带宽频率ωBW至相位角为-180°时的频率ω180,也即通过在滚转轴上施加激励信号,得到滚转轴运动响应较为明显的频段ωBW~ω180。在该频段内,滚转(俯仰)角速度响应幅频曲线的平均值表征了飞机滚转(俯仰)轴运动幅值的大小。因此,p/q越大,表明在俯仰运动幅度相同的情形下,由俯仰运动引起的滚转轴耦合运动的幅值越大[28]。该参数的计算方法如下:
1) 在副翼通道输入扫频信号δa激励飞机,得到滚转角的时域响应φ。绘制φ/δa的伯德图,据此得到ωBW与ω180[29]。
2) 在升降舵通道输入扫频信号δe激励飞机,得到滚转、俯仰角速度的时域响应p与q。
3) 绘制p/q的幅频特性曲线,将ωBW~ω180频段在对数坐标轴上均匀10等分,得到10个等分点对应的p/q频域响应的幅值,上述10个幅值的平均值即为p/q的大小。
q/p为滚转输入引起的俯仰角速度响应幅频曲线在一特定频段内的平均值与滚转角速度响应幅频曲线在该频段内的平均值之比。q/p主要关注作用于俯仰轴的耦合运动响应的幅度,因此该频段取为由升降舵输入引起的俯仰角频域响应的ωBW~ω180[27],也即通过在俯仰轴上施加激励信号,得到俯仰轴运动响应较为明显的频段ωBW~ω180。q/p越大,表明在滚转运动幅度相同的情形下由滚转运动引起的俯仰轴耦合运动的幅值越大。该参数的计算方法如下:
1) 在升降舵通道输入扫频信号δe激励飞机,得到俯仰角的时域响应θ。绘制θ/δe的伯德图,根据该图得到ωBW与ω180。
2) 在副翼通道输入扫频信号δa激励飞机,得到俯仰、滚转角速度的时域响应q与p。
3) 绘制q/p的幅频特性曲线,将ωBW~ω180频段在对数坐标轴上均匀10等分,得到10个等分点对应的q/p频域响应的幅值,上述10个幅值的平均值即为q/p的大小。
综上,p/q与q/p的组合全面地表征了俯仰轴与滚转轴之间运动耦合程度的强弱,可作为评定飞机轴间运动耦合飞行品质的特征参数。
2 飞机飞行品质评估试验
采用第1节建立的基于任务的飞机轴间运动耦合飞行品质评定方法,通过调整升降舵、副翼的破损比例系数ke与ka,设置不同舵面破损比例的试验飞机分别进行飞行品质评估试验。由于轴间运动耦合程度的强弱与舵面破损面积相关,因此通过试验可得到具有不同俯仰-滚转轴间运动耦合程度的试验飞机的飞行品质等级。
2.1 评定示例
以升降舵与副翼同时破损为例,对评定过程进行介绍。试验设置飞机纵向对称面左侧的升降舵破损面积占升降舵总面积的20%,左侧副翼破损面积占副翼总面积的30%,也即ke=0.2,ka=0.3。由试飞工程师调整地面模拟试验平台的相关参数后,驾驶员在该平台上完成多轴平显跟踪任务试验,并记录试验数据。试验飞机的初始飞行速度为180 m/s,飞行高度为3.0 km[16]。整个任务过程中的飞行速度、飞行高度、迎角、侧滑角、俯仰角速度、滚转角速度、升降舵偏角、副翼偏角、姿态角指令与姿态角指令的时域响应如图4所示。
从图4可见,在此次试验任务中,飞行速度基本稳定,飞行高度持续下降,迎角保持在0°~10°之间,处于小迎角范围,侧滑角保持在-6°~2°之间,俯仰角速度最大值为18 (°)/s,滚转角速度最大值为-108 (°)/s(负值代表向左滚转),升降舵与副翼均未达到极限偏角,驾驶员可以较好地跟踪姿态角指令。通过计算,俯仰姿态跟踪误差在10 mil内且滚转姿态跟踪误差在4°内的时间比例为49.2%;俯仰姿态跟踪误差在20 mil内且滚转姿态跟踪误差在6°内的时间比例为61.8%;与表1对比可知,此次任务的完成效果为“一般的”。
图4 多轴HUD跟踪任务运动参数与目标指令时域响应
驾驶员对于此次任务的评价为“飞机有较明显的耦合运动,在大幅操纵时,跟踪能力略差,俯仰轴与滚转轴的响应较慢且不易预测,不易达到满意的任务性能标准,没有明显的驾驶员诱发振荡趋势”。根据库珀-哈珀评分表,驾驶员给出的试验飞机CHR为5.0分。
完成飞行品质评估试验后,需要计算试验飞机的轴间运动耦合特征参数p/q与q/p。以计算p/q为例,在试验飞机副翼通道输入扫频信号δa激励飞机,该信号需有效地激励出飞机滚转轴的运动响应,同时减小对基准运动状态的扰动。取δa的幅值为1°,频率由3.14 rad/s (2.0 s时)逐渐增大至6.28 rad/s(4.8 s时)。扫频信号与飞机滚转角φ的时域响应如图5所示。
图5 副翼扫频信号与滚转角时域响应
根据扫频信号与滚转角的时域响应,采用快速傅里叶变换算法计算φ/δa的频域响应[29],并绘制伯德图,如图6所示。
从图6中可得到相角为-180°时的频率ω180为9.8 rad/s,找到ω180所对应的幅值1.2 dB,在此基础上增加6.0 dB,求得幅值为7.2 dB对应的频率ωBWgain为6.1 rad/s;从图6中找到相角为-135°时的频率ωBWphase为3.9 rad/s,带宽ωBW即为ωBWgain与ωBWphase中的较小者,因此,本算例中ωBW为3.9 rad/s。
图6 滚转角和副翼偏角的伯德图
在试验飞机升降舵通道输入扫频信号δe激励飞机,该信号的幅值、频率与副翼扫频信号δa相同。扫频信号、飞机滚转角速度与俯仰角速度的时域响应如图7所示。

图7 升降舵扫频信号、滚转角速度与俯仰角速度时域响应
根据滚转角速度与俯仰角速度的时域响应,采用快速傅里叶变换算法,绘制p/q的幅频特性曲线,如图8所示。
将图8中的ωBW~ω180频段在对数坐标轴上均匀10等分,计算各等分点频率处的幅值的平均值(图8中点1~点11幅值的平均值)为7.24 dB,也即p/q为7.24 dB。
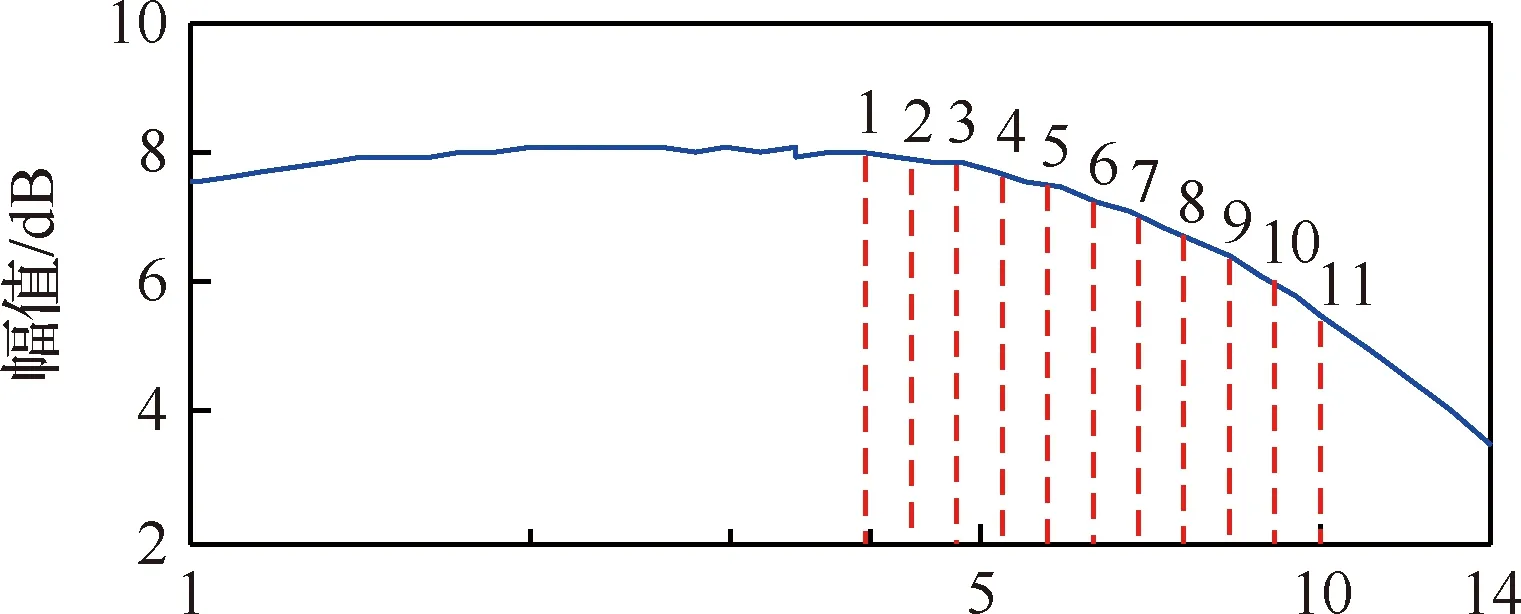
图8 滚转角速度和俯仰角速度的幅频特性曲线
类似地,采用1.6节所述的q/p计算方法,可得到试验飞机的q/p为-23.07 dB。
综上,试验飞机舵面故障情形、轴间运动耦合特征参数与飞行品质评定结果如表2所示。
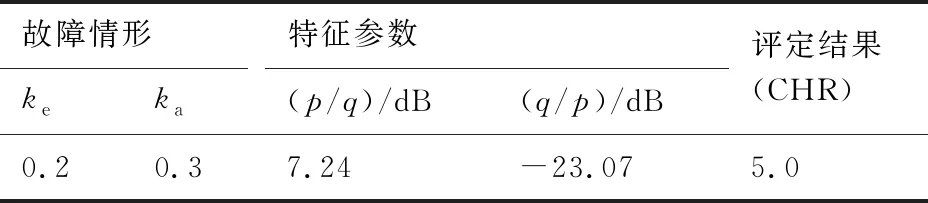
表2 评定示例的试验结果
当CHR为1.0~3.5分时,飞行品质为1级;当CHR为4.0~6.5分时,飞行品质为2级;当CHR为7.0~10.0分时,飞行品质为3级[29]。因此,该试验飞机的飞行品质评定结果为2级。
2.2 试验结果及分析
通过调整升降舵、副翼的破损比例系数ke与ka的数值,设置了37种不同俯仰-滚转轴间运动耦合程度的情形。为研究可能出现的各类故障情形,37个试验组可分为4类:C-0的ke与ka均为0,表征飞机无故障;当仅ka设置为0时,表征仅飞机机体纵向对称面左侧的升降舵破损(表3中的C-1、C-2、C-11等);当仅ke设置为0时,表征仅左侧副翼破损(表3中的C-3、C-7、C-9等);其余各ka与ke均不为0的情况表征飞机对称面左侧的升降舵与副翼同时破损。针对每一种故障情形,试验飞行员均要进行3次以上的地面飞行模拟试验,以保证给出飞行品质评分的准确性。当多名试验飞行员给出的评分不同时,取他们评分的均值作为最终的飞行品质评定结果。各情形的飞行品质特征参数p/q、q/p与飞行品质评定结果如表3所示。C-0代表飞机舵面未破损,在常规非大迎角飞行任务中,飞机俯仰运动引起的滚转运动可忽略,也即p/q基本可忽略。
3 舵面破损对飞机飞行品质的影响
将表3中的舵面破损比例系数、轴间运动耦合飞行品质特征参数与飞行品质评定结果对比,如图9与图10所示。
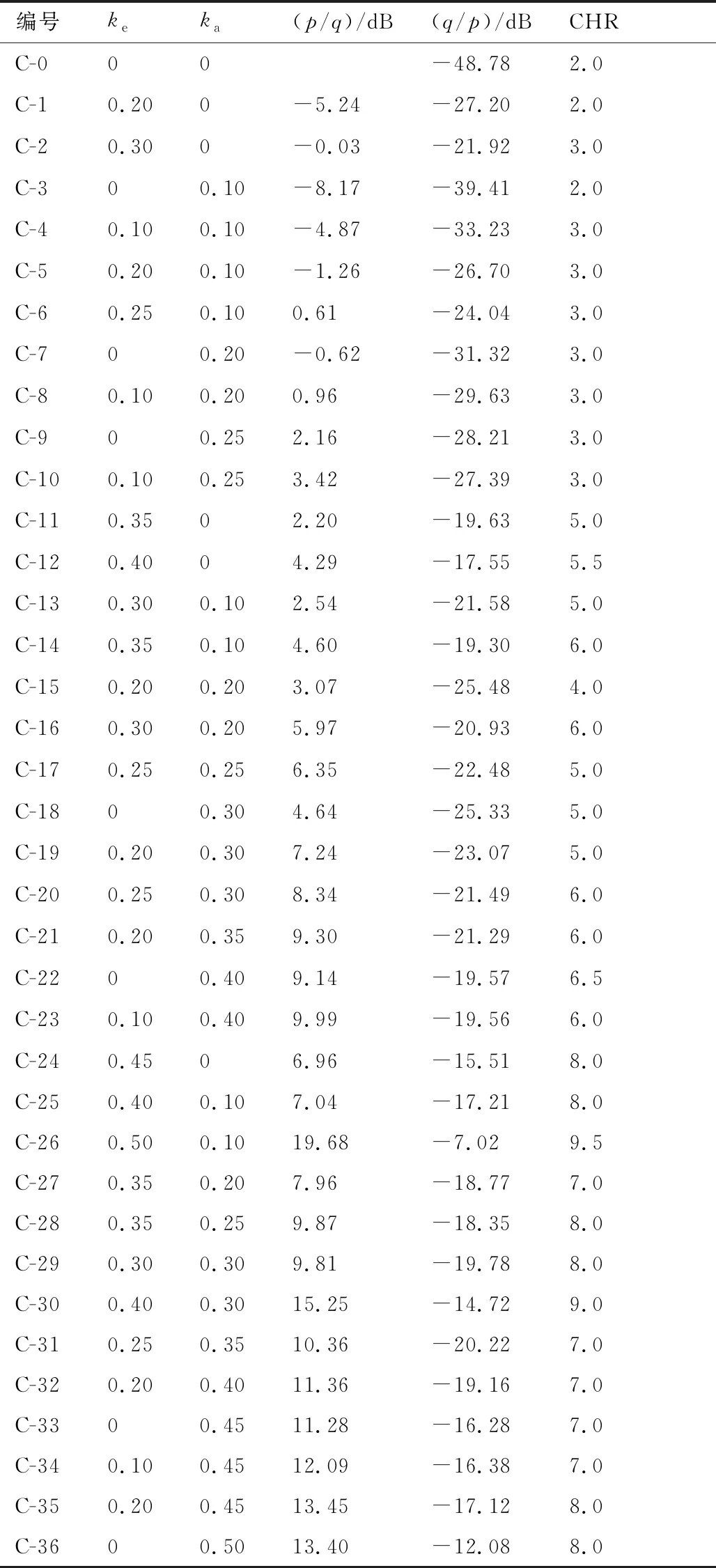
表3 飞行品质特征参数与飞行品质评分
图9中,坐标原点代表无故障情形C-0,试验机的ke与ka均为0,无俯仰-滚转轴间耦合运动,飞行品质为1级。C-1~C-10情形(用圆形表示)位于图9虚线左下方的区域,表明其舵面破损程度均较轻。这10种情形同时分布在图10左下方的区域,也即p/q与q/p数值较小的区域,飞机轴间耦合运动幅度均较弱,飞行品质与无故障飞机相同,仍保持为1级。显见,轻度的舵面破损对飞机飞行品质的影响较小。
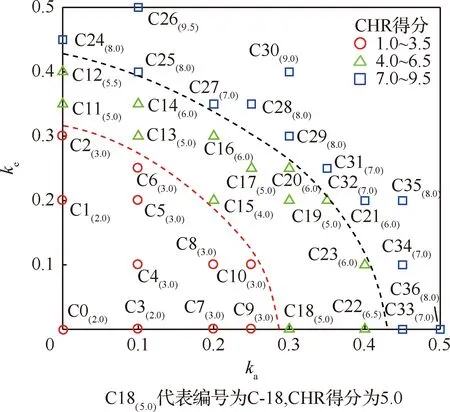
图9 不同舵面破损比例系数的飞行品质评定结果
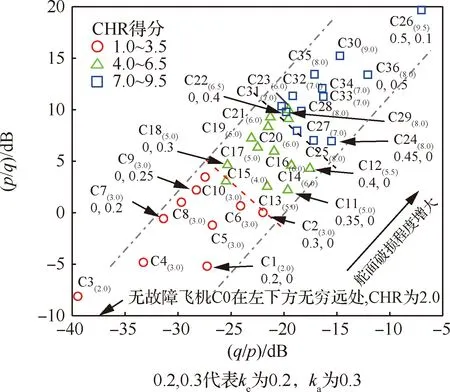
图10 不同特征参数的飞行品质评定结果
随着升降舵或副翼破损程度的增加以及舵面同时破损,对应C-11~C-23情形(用三角形表示)。这13种情形分布在图10的中部区域,其p/q与q/p的数值相比于C-1~C-10情形的大,轴间耦合运动幅度相对较强,因此试验机难以达到满意的任务完成效果,飞行品质降为2级。
当试验机的舵面进一步破损,对应C-24~C-36情形(用正方形表示)。这13种情形分布在图10右上方的区域,也即p/q与q/p数值相对较大的区域,飞行员难以完成多轴平显跟踪任务,飞行品质降为3级。
综上,从舵面无故障到较大程度的破损,试验机的p/q与q/p增大,轴间耦合运动幅度增强,飞行品质由1级降低至3级,也即舵面破损程度的增大使飞机飞行品质变差。
3.1 飞机飞行品质的影响因素
分析试验结果与驾驶员评价后发现,当飞机的升降舵或副翼破损后,其飞行品质的影响因素可分为两方面:
1) 舵面操纵效能的下降会影响飞行品质。对比获评1级飞行品质的C-4(ke与ka均为0.10)、 获评2级飞行品质的C-15(ke与ka均为0.20) 与获评3级飞行品质的C-29(ke与ka均为0.30)。显然,随着舵面破损比例系数(ke或ka)增大,舵面操纵效能降低,飞行品质等级下降。多轴平显跟踪任务的目标指令变化频繁且迅速,舵面操纵效能的下降,会使飞机的响应速度滞后于驾驶员的预期,增加了跟踪目标指令的难度,使飞机飞行品质等级下降。
驾驶员的评价也印证了这一结论,C-29等获评3级飞行品质的试验组的驾驶员评价中,均出现了“舵面操纵响应较慢,难以精确跟踪指令”的描述;获评2级飞行品质的C-15等试验组,驾驶员常会给出“操纵响应慢于预期”的评价;而获评1级飞行品质的C-4等试验组,均不会出现操纵响应偏慢的评价。
2) 飞机俯仰-滚转轴间耦合运动幅值的大小也会影响飞行品质。随着舵面破损程度增大,耦合运动幅度增强,使飞行员难以准确预测飞机的操纵响应,完成多轴平显跟踪任务的难度增大,飞行品质等级下降。
获评1级飞行品质的C-1~C-10试验组的驾驶员评价指出,虽然驾驶员能够感受到轴间耦合运动,但由于其幅值较小,对跟踪精度不会产生显著的不利影响;获评2级飞行品质的C-11~C-23试验组的驾驶员会给出“有明显的轴间运动耦合现象,难以达到满意的任务完成效果”的描述;获评3级飞行品质的C-24~C-36试验组的驾驶员评价中,均出现了“轴间耦合运动幅度过大”的描述,执行任务飞机的运动响应常会发散。
3.2 舵面破损对飞行品质影响的差异
将仅升降舵或仅副翼在相同破损比例时的飞行品质评定结果(表3中的C-1与C-7、C-2与C-18、C-12与C-22)对比,结果如图11所示。
由图11可见,在相同的舵面破损比例情形下,仅副翼破损时的飞行品质相比于仅升降舵破损时的差,其原因可从舵面操纵效能下降与轴间运动耦合幅度两方面进行分析:
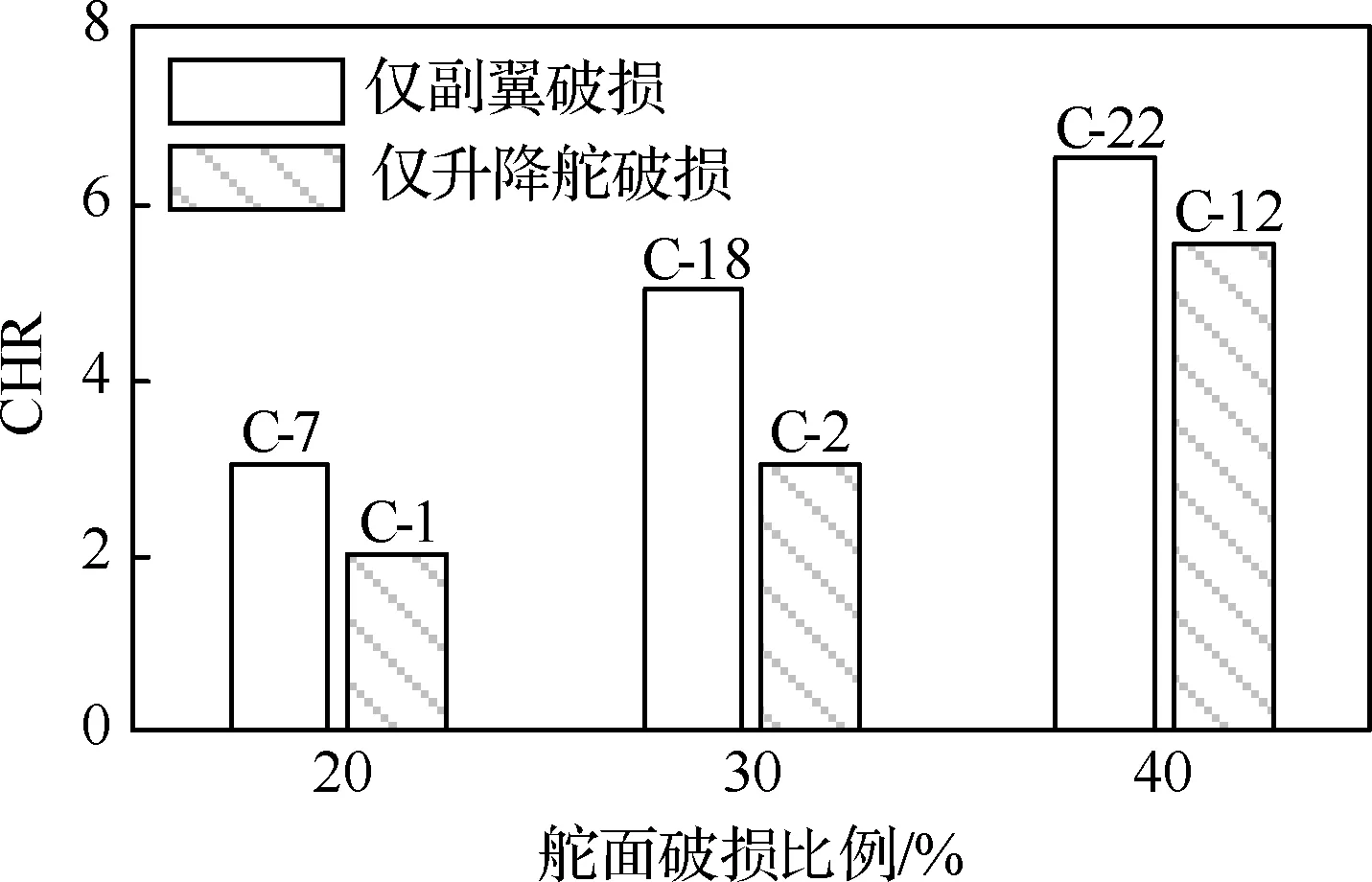
图11 舵面破损对飞行品质影响的差异
1) 由图4(e)、图4(f)、图4(i)与图4(j)可见,在整个多轴平显跟踪任务过程中,俯仰角指令处于±5°之间,滚转角指令处于±80°之间,飞机的俯仰角速度处于-9~18 (°)/s之间,滚转角速度处于-108~88 (°)/s之间。显然,滚转角指令的变化幅度远大于俯仰角指令,滚转角速度的变化幅度也远大于俯仰角速度,也即该任务对滚转轴机动能力的要求较高,对俯仰轴机动能力的要求相对较低。
因此,当仅升降舵破损与仅副翼破损的舵面破损比例相同时,也即俯仰轴与滚转轴操纵效能减小幅度相同时,副翼破损引起的滚转轴操纵效能的降低对于任务完成效果的影响大于升降舵破损引起的俯仰轴操纵效能降低,因此仅副翼破损时的飞行品质相对较差。
2) 由于任务中俯仰角速度变化幅度较小,所要求的俯仰轴操纵幅度较小,因此仅升降舵破损时,由俯仰操纵引起的滚转角速度也较小,飞行品质相对较好;相比之下,仅副翼破损时,由于该任务所要求的滚转轴操纵幅度较大,因此由滚转操纵引起的俯仰角速度也较大,对操纵响应特性的影响更加明显,飞行品质相对较差。
驾驶员的评价也印证了上述分析,以C-2(仅升降舵破损)与C-18(仅副翼破损)的驾驶员评价为例,C-2情形的驾驶员评价为“有轻微的俯仰-滚转耦合运动,可以通过积极的操纵获得满意的跟踪效果”。而C-18情形的驾驶员评价为“飞机滚转轴响应较慢,难以较好地跟踪滚转角指令,滚转操纵会引起明显的俯仰运动,不利于任务的完成”。对比上述评价,仅升降舵破损时,驾驶员未给出飞机俯仰轴跟踪能力不足的描述,耦合运动幅度相对较小;仅副翼破损时,驾驶员感受到滚转轴跟踪能力不足,耦合运动幅度较大。
综上,当舵面破损比例相同时,仅副翼破损对任务完成效果的影响大于仅升降舵破损,因此飞行品质较差。
3.3 舵面破损对飞机飞行品质的量化影响
由于舵面破损比例系数对飞行品质的影响与飞机的构型、惯量特性等相关,因此由图9得到的飞行品质等级边界不具有普适性,不对其边界进行拟合与规律分析。
由图10可见,p/q与q/p可以较好地表征舵面破损对角速率指令式电传控制飞机轴间运动耦合飞行品质的影响。为量化该影响,对图10中的飞行品质等级边界进行拟合。
图10中所有试验组的飞行品质特征参数p/q与q/p均处于两条正斜率的点划线之内。通过对C-7、C-10、C-19与C-35 4个点的飞行品质特征参数进行拟合,可得到左边界的表达式为
p/q-1.12q/p=35.8
(6)
通过对C-1、C-2、C-12与C-24 4个点的飞行品质特征参数进行拟合,可得到右边界的表达式为
p/q-1.12q/p=22.4
(7)
由于p/q、q/p均与飞机舵面的破损程度成正比。随着舵面破损程度的增大,两种耦合效应会同步增大,也即p/q与q/p具有一定的相关性,因此各试验组的飞机特征参数均处于两条点划线之内。该线的斜率表征了一架飞机p/q与q/p之间的固有关系,对于不同的飞机,该线的斜率不同,斜率大小与飞机的转动惯量、舵面面积等参数相关。
图10中的虚线为1级飞行品质区域与2级飞行品质区域的分界线,通过对C-2、C-6、C-15与C-18 4个点的飞行品质特征参数进行拟合,可以得到该虚线的表达式为
p/q+0.87q/p=-19.1
(8)
图10中的粗点划线为2级飞行品质区域与3级飞行品质区域的分界线,通过对C-12、C-21、C-25与C-27 4个点的飞行品质特征参数进行拟合,可以得到该粗点划线的表达式为
p/q+0.87q/p=-8.4
(9)
式(8)与式(9)均为负斜率直线,也即为保证飞行品质不降级,要求p/q随q/p的增大而减小。这是因为随着q/p的增大,作用于俯仰轴的耦合运动的幅值增大,任务难度增加,驾驶员需要花费更多的精力在俯仰轴操纵上,此时如果减小p/q的数值,也即减小了作用于滚转轴的耦合运动的幅度,减少了驾驶员在滚转轴上需分配的精力,从而使飞行品质不发生降级。
根据式(6)~式(9),当算例飞机升降舵或副翼轻度破损、p/q与q/p满足

(10)
时,飞机舵面操纵效能下降幅度与轴间运动耦合程度均较小,飞行品质等级与无故障飞机相同,仍为1级。
随着舵面破损程度增大,p/q与q/p满足

(11)
时,飞机舵面操纵效能明显不足,轴间耦合运动对飞行员操纵产生了较大的影响,飞行品质由1级降为2级。
当舵面进一步破损,p/q与q/p满足

(12)
时,轴间耦合运动幅值较大,飞行员难以完成既定飞行任务,飞机飞行品质由2级降为3级。
需要强调的是,飞行品质评定准则需根据大量的地面飞行模拟试验、空中飞行试验的结果制定。因此,式(10)~式(12)并非实际飞机飞行品质要求的判据,只作为舵面破损情形下飞机飞行安全与作战效能评估的一种方法与理论参考。
4 结 论
1) 针对角速率指令式电传控制飞机轴间运动耦合飞行品质评定的问题,选取多轴平显跟踪作为评定任务,建立了舵面破损飞机的飞行动力学模型,选取p/q与q/p作为表征飞机轴间运动耦合程度的飞行品质评定参数,形成了基于任务的角速率指令式电传控制飞机轴间运动耦合飞行品质的评定方法。
2) 舵面出现破损故障后,飞机飞行品质等级的主要影响因素有两个:一是舵面操纵效能降低的程度;二是飞机俯仰-滚转轴间耦合运动幅值的大小。在相同舵面破损比例的情形下,仅副翼破损时的飞行品质相比于仅升降舵破损时差。
3) 特征参数p/q与q/p较好地表征了舵面破损对角速率指令式电传控制飞机轴间运动耦合飞行品质的影响。针对算例飞机,当舵面破损程度较轻,满足p/q+0.87q/p<-19.1、22.4
-8.4、22.4
