基于改进人工势场法的局部路径规划
2021-07-06张珂刘畅兰鹏宇
张珂 刘畅 兰鹏宇
(重庆交通大学机电与车辆工程学院,重庆 400041)
主题词:质量 无人驾驶车辆 人工势场法 斥力场形状 局部路径规划
1 前言
路径规划是无人驾驶车辆核心技术之一,其目标是在某些要求下,在规定区域内自动搜索并快速生成到达目标点的最优无碰撞路径[1]。根据无人驾驶车辆对行驶区域路况信息的把握程度不同,可将路径规划分为2种:一种是基于局部区域信息生成的局部路径规划,另一种是基于完整区域信息生成的全局路径规划。当前解决局部路径规划的算法主要有人工势场法、模糊算法、A*、人工免疫法与滚动窗法等,解决全局路径规划的算法主要有粒子群法、可视图法、链接图法与拓扑法[2]。
人工势场法来源于Khatib[3]提出的一种虚拟力法,因其较少的计算量、良好的实时性、易于底层控制的特点而被广泛应用[4]。该方法的核心思想是将机器人在现实环境中的运动抽象为虚拟人工力场中的运动;目标点对机器人产生引力,引力随着初始点与终点的距离减小而减小,障碍物对机器人产生的斥力与其间距成反比,引力场和斥力场矢量合成作用力势场;机器人的运动由作用力势场控制,最终实现绕过障碍物抵达目标点[5]。虽然该方法逻辑简单、可控性好,但是仍存在一些不足:由于其初始应用对象为移动机器人,因此在应用到无人驾驶车辆时,没有考虑到障碍物轮廓尺寸、道路边界、移动速度和其他约束。Shi等[6]将移动机器人与目标间距离添加到人工势场法的斥力场中,使生成的路径更加符合实际情景。Choe[7]提出转向势场理念,建立了三维空间虚拟势场,通过势场矢量叠加保证了路径规划的实时性。Wang[8]运用蚁群算法进行了动态路径规划,并考虑了运动障碍物模型。修彩靖[9]在传统人工势场中引入道路边界势场约束,但只可针对一般路况,且要求在静止工况下。Schmidt[10]提出了多目标换道驾驶行为,但没有考虑障碍物的影响。唐志荣等[11]重新构建了障碍物和道路边界势场模型,但仅考虑了静态因素,未考虑障碍物的移动属性。李军等[12]重新构建了障碍物模型,并引入边界斥力势场模型,将障碍物移动速度纳入考虑范围之内,但并未对其进行具体化分析。针对无人驾驶车辆实际行驶状况,本文对传统人工势场算法进行优化,通过重新构建障碍物势场,将行驶道路中常见的2种障碍物构建为含有具体化数值的椭圆形和圆形,并基于车速构建增益系数可变的道路边界斥力势场。
2 传统人工势场法
2.1 引力场
引力场随着移动车辆与目标点之间的距离变化而变化,其与移动车辆和目标点之间的距离成正比,具体定义如式(1):

式中,Uatt(x)为目标点的引力场,K为引力势场作用系数,(Ps,Pg)为始发点至目标点间的空间距离。
引力为引力势场的负梯度,如式(2):

2.2 斥力场
斥力场与移动车辆和目标点之间的距离成反比,其定义如式(3):
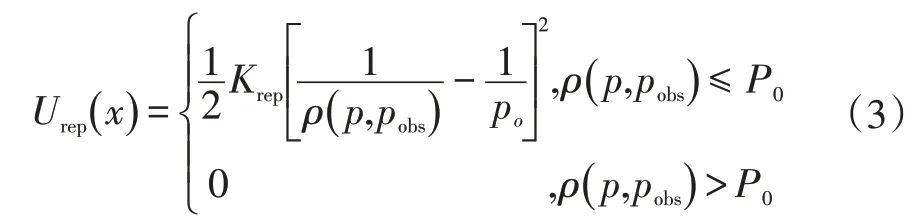
式中,Urep(x)为障碍物斥力场,Krep为斥力场作用系数,ρ(p,pobs)为无人驾驶车辆与障碍物之间的欧式距离,po为障碍物作用半径,当ρ(p,pobs)>po时,Urep(x)为0。
式中,Urep(x)为障碍物斥力场,Krep为斥力场作用系数,ρ(p,pobs)为无人驾驶车辆与障碍物之间的欧式距离,po为障碍物作用半径,当ρ(p,pobs)>po时,Urep(x)为0。
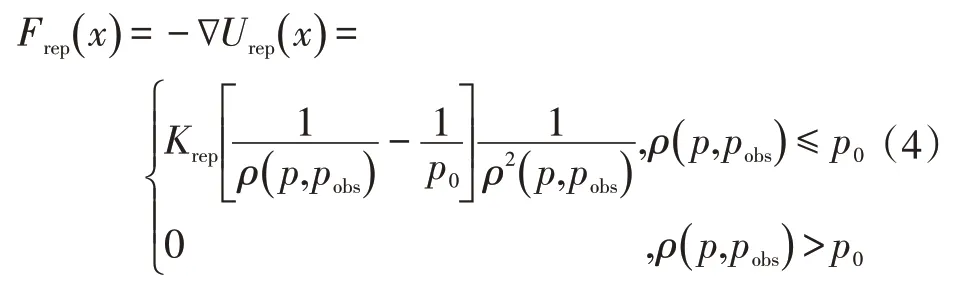
当局部路径规划中存在N个障碍物时,其所受合力,如式(5):

式中,Fsum(x)为合力,Fatt(x)为引力,N为障碍物个数,Frep(x)为障碍物斥力。
2.3 不足及改进思路
(1)在传统人工势场中,障碍物势场斥力范围都为圆形域,而在现实场景中,以保有量最多的B 级车为例,其长宽比大约为2.5,纵向距离明显大于横向距离,而且在行驶过程中,无人驾驶车辆对纵向安全距离的要求远大于横向。所以,将行车类障碍物的斥力场由圆形域改进为类椭圆形域。
(2)在实际行驶中,道路上除了有汽车之外还有行人,但是行人在纵向和横向占据空间位置较小,因此为了安全起见,将行人障碍物斥力场设置为半径为1 m的圆形区域。
(3)在实际城市路况中,机动车道2侧存在非机动车道和人行车道,其车道区分并不明显。在行驶过程中,为保证无人驾驶车辆始终在道路边界内,需要建立道路边界斥力势场,而传统人工势场不是基于实际行驶过程中的车速变化而进行动态调节的。因此,本文提出一种可以随车速变化自动调节的可变道路障碍物边界斥力势场,提高汽车行驶过程中的安全性。
3 改进的人工势场法
根据前文分析,本文提出了改进人工势场法,具体改进如下:
(1)将传统圆形障碍物斥力场改进为椭圆形,并使其长短轴之比为2.5,长轴长为5 m,质心坐标为(X1,Y1),[σ1]和[σ2]为控制障碍物斥力场大小的影响因素,具体表达式如式(6):
“越是面对火爆的市场,越要从休闲农业和乡村旅游产业长远发展出发,加快产业提档升级。”陈晓华说,要有序健康发展,真正把农民劳动生活、农村风情风貌、农业产业特色体现出来。要遵循乡村自身发展规律,适度开发、合理开发、科学开发,保护田园风光、保留原始风貌、保持乡土味道,防止低水平重复建设。

将改进障碍物边界拓展到三维空间中,其斥力势场可通过二维高斯分布函数推导,如式(7):
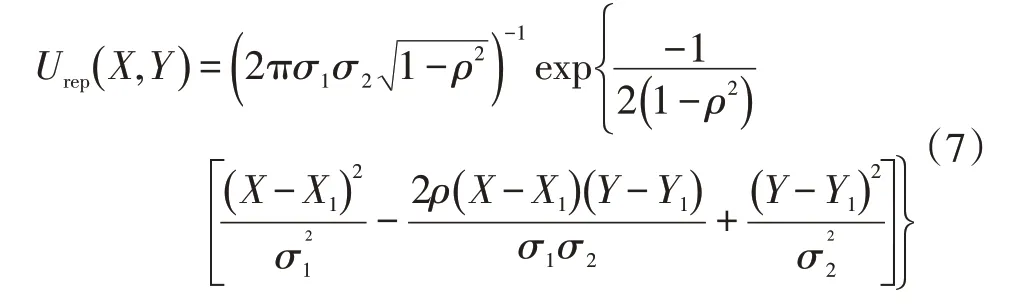
式中,β为斥力势场作用系数,ρ为横纵向影响因数,σ1和σ2为控制障碍物斥力场大小的影响因素。令ρ=0,β=(2 πσ1σ2)-1,则简化后的三维斥力势场为:
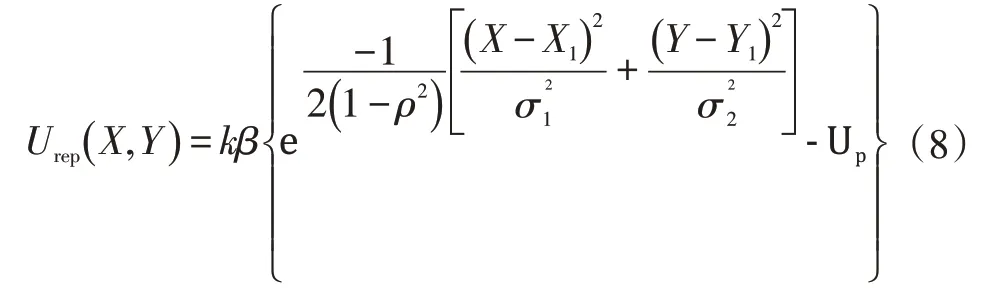
由于指数函数必大于0,因此在式(8)中加入接近于0 的正数UP来平衡,引入放大系数k,建立如图1所示的汽车障碍物模型,其纵向长度为5.2 m,横向宽度为2 m,近似为一辆B 级车。其障碍物斥力势场的三维分布图和等高线如图1~2所示。
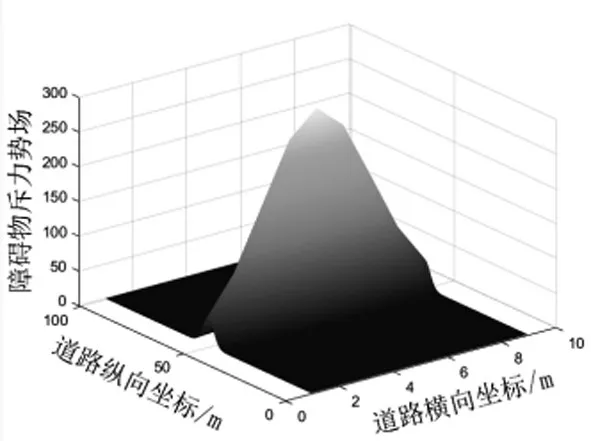
图1 障碍物斥力势场三维图
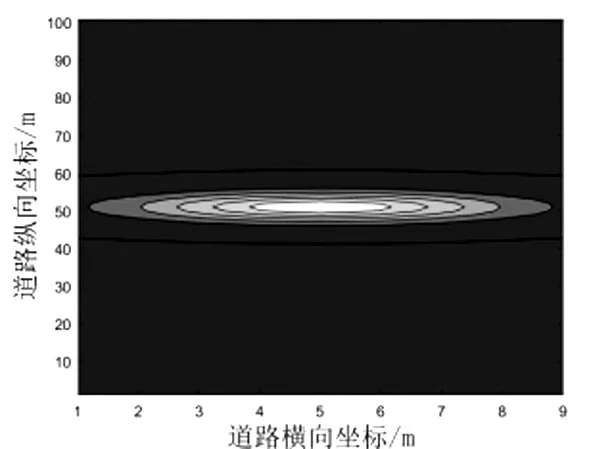
图2 障碍物斥力势场等高线图
(2)将行人障碍物设置为半径为1 m 的圆形作用区域,质心坐标为(X0,Y0),具体表达式如式(9):

行人障碍物的边界势场三维分布如图3~4所示。

图3 障碍物斥力场三维图
图4 障碍物斥力场等高线图
(3)将传统道路边界障碍物势场改进为根据行驶车速的可变障碍物作用势场,具体表达式如式(10):
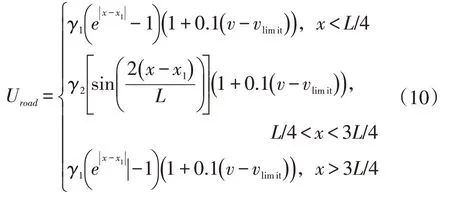
γ1,γ2为边界斥力势场影响系数,L为道路宽度,xl,xr分别为左右车道中线的横向位置,vlimit为城市综合工况限速大小,取其值为30 km/h,v为城市综合工况中汽车实际行驶速度(默认为该速度大于30 km/h)。根据公式得到道路边界斥力势能场的三维分布如图5所示。
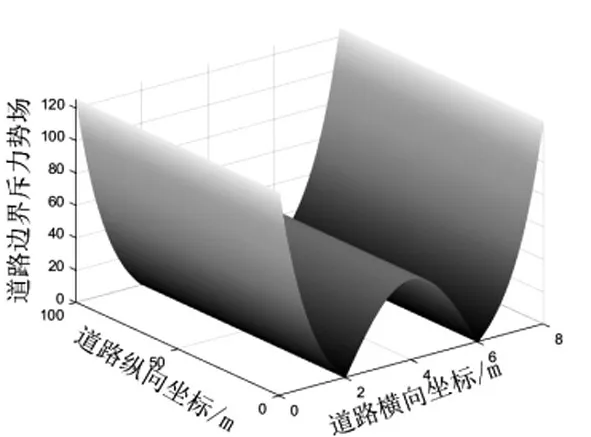
图5 道路边界斥力势场三维图
4 实验仿真与分析
为证明改进算法的合理性,在计算机中进行仿真,并基于不同行驶车速工况进行对比分析。
(1)行驶车速为30 km/h 产生的路径规划对比如图6所示,行驶车速为50 km/h产生的路径规划对比如图7所示。
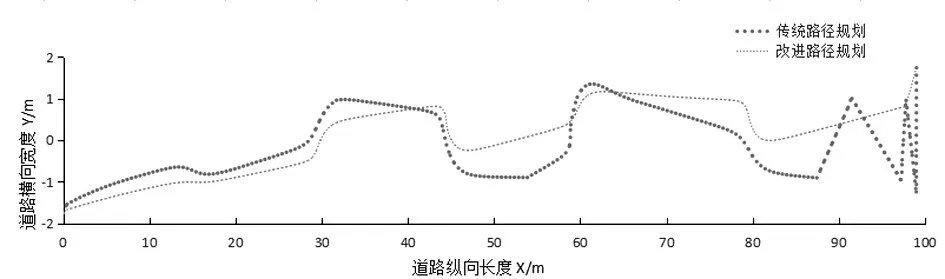
图6 时速30 km/h产生的路径规划对比

图7 时速50 km/h产生的路径规划对比
(2)改进路径的曲率对比分别如图8~9所示。
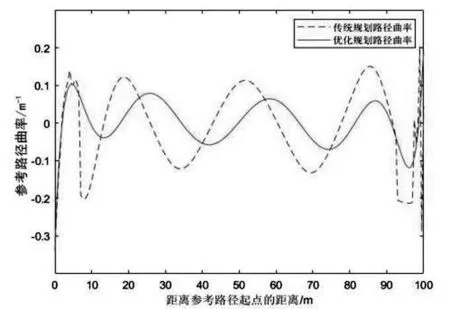
图8 时速30 km/h路径曲率对比
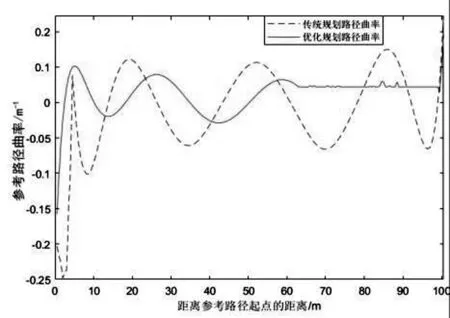
图9 时速50 km/h路径曲率对比
在宽4 m、长100 m的双向道路上放置2种障碍物模型,让车辆分别以30 km/h、50 km/h 2种不同车速行驶,利用提出的算法规划局部路径。通过对2种工况下的仿真结果对比分析可得,无人驾驶车辆在通过优化后的障碍物模型路段所生成的2段规划路径曲率的绝对值都小于0.25 m-1,满足规划路径的要求,而且随着行驶车速的提高,其生成的路径与道路边界的安全距离不断增加,满足设计要求,说明改进算法具有较高的可行性和安全性。
5 结束语
本文对局部路径规划的人工势场法进行了改进,结合无人驾驶车辆的实际应用场景,对传统障碍物进行了实际优化和具体化,并将行驶车速与道路边界势场结合,提出可随车速变化的边界斥力势场。仿真结果表明,算法规划路径的综合性能较好。未来将对路径曲率进行进一步优化,使其规划能力更加完善。