阀体搬运自动导向车轨迹跟踪控制
2021-07-04孔宁宁朱海清李天津
孔宁宁, 朱海清, 李天津
(江南大学 机械工程学院, 江苏 无锡 214122)
安全阀作为一种防超压保护装置,是承压设备内必不可少的安全附件,每年至少需要校检一次。安全阀规格种类多,口径从DN8到DN500不等,质量大的安全阀接近1 t,然而大多数办公用房内无法装备行车等吊装设备,因此常常使用阀体搬运AGV搬运安全阀。由于阀体搬运AGV的非完整特性,AGV在移动过程中,会出现车体质心位置与几何中心不完全重合的现象,这会导致AGV在移动过程中偏离既定轨迹。因此提高AGV的底层轨迹跟踪控制能力有助于其实现更高层次的任务。
为了实现AGV精确地轨迹跟踪,国内外学者采取了多种控制方法,取得了许多重要的研究成果。目前主流的控制方法有PID控制、Backstepping控制、滑模控制及智能控制等[1-7]。但是很多研究都是在AGV无质心偏移的理想状态下设计的控制律,对质心偏移下的AGV轨迹跟踪控制研究相对较少。然而自动导引小车处在非结构化的环境中,会有各种外部干扰等不确定性因素,因而很多应用在确定模型基础上的控制方法很难实现预期的控制效果[8]。课题组针对运动学模型下质心偏移的阀体搬运AGV,基于改进切换函数,设计了滑模变结构控制器;在此基础上,引入了基于Lyapunov函数的反馈控制律,得到了一种新型轨迹跟踪控制器,最后应用MATLAB/Simulink软件对控制器进行了仿真实验验证。
1 AGV的结构及运动学模型
1.1 阀体搬运AGV的系统结构
研究对象是课题组设计的阀体搬运AGV,其结构如图1所示。该设备主要由车体、承载装置、控制系统、安全防护系统、运动系统和传感检测系统构成。AGV的运动系统由2个同轴驱动轮和若干个起平衡作用的万向轮组成,采用差速驱动的方式驱动车体转向。

图1 阀体搬运AGV结构示意Figure 1 Structure diagram of AGV valve body handling
1.2 AGV的运动学建模
阀体搬运AGV运动学模型如图2所示。该模型是在AGV质心和几何中心不重合的非理想状态下建立的,AGV的运动状态可由D点坐标反映。d为AGV质心c与几何中心D之间的距离。

图2 AGV运动模型示意Figure 2 Schematic diagram of AGV motion model
设实际位姿P=(x,y,θ)T,控制输入q=(v,w)T。其中:(x,y)为车体几何中心D点坐标;v为线速度;ω为角速度;θ为机器人运动方向和X轴夹角。
因此阀体搬运AGV的运动学模型为
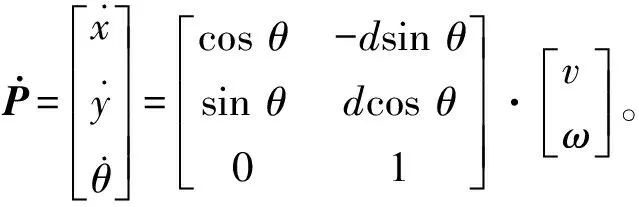
(1)
设理想位姿Pr=(xr,yr,θr)T,速度指令qr=(vr,wr)T。从P移动到Pr所产生的误差Pe=(xe,ye,θe)T。因此,位姿误差方程为
(2)
对式(2)求导并结合式(1),可得位姿误差微分方程:
(3)
由式(3)所建立的质心偏移下阀体搬运AGV的运动学位姿误差微分方程,通过设计合适的控制输入q=(v,w)T,无论AGV初始状态时的误差是多少,在输入q的作用下从实际位姿移动到理想位姿时产生的误差Pe有界且收敛,即
limt→∞‖(xe,ye,θe)‖=0。
2 跟踪控制器的设计
2.1 切换函数的设计
引理:对任意x∈R且∣x∣<∞,有
φ(x)=xsin (arctanx)≥0,



由以上结论,设计切换函数:
(4)
2.2 新型轨迹跟踪控制器
(5)
令α=arctan (vrye),由式(4)~(5)可得:
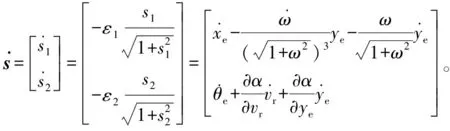
(6)
代入式(3)经整理得:
(7)
现引入Lyapunov反馈控制律:
(8)
式中:k1,k2和k3为正常数。
得到新型轨迹跟踪控制律:
(9)

3 仿真实验
为验证课题组设计的控制律式(9)的有效性,在MATLAB/Simulink环境下,针对圆轨迹进行仿真。取控制器参数ε1=ε2=50,k1=10,k2=24,k3=10,质心偏移量d=0.3 m。设置初始位姿误差为[3,0,0],vr=1.0 m/s,wr=1.0 rad/s。
仿真结果图3~6表明,课题组所设计的控制律能够很好地实现轨迹跟踪效果,位姿误差在不到5 s的时间里均能平稳地进入稳态并逐渐收敛到0。
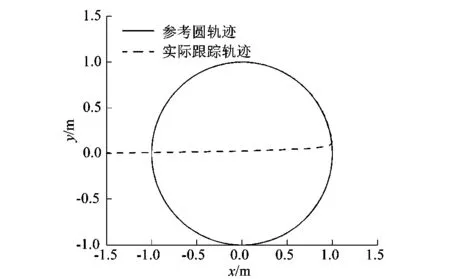
图3 轨迹跟踪Figure 3 Trajectory tracking
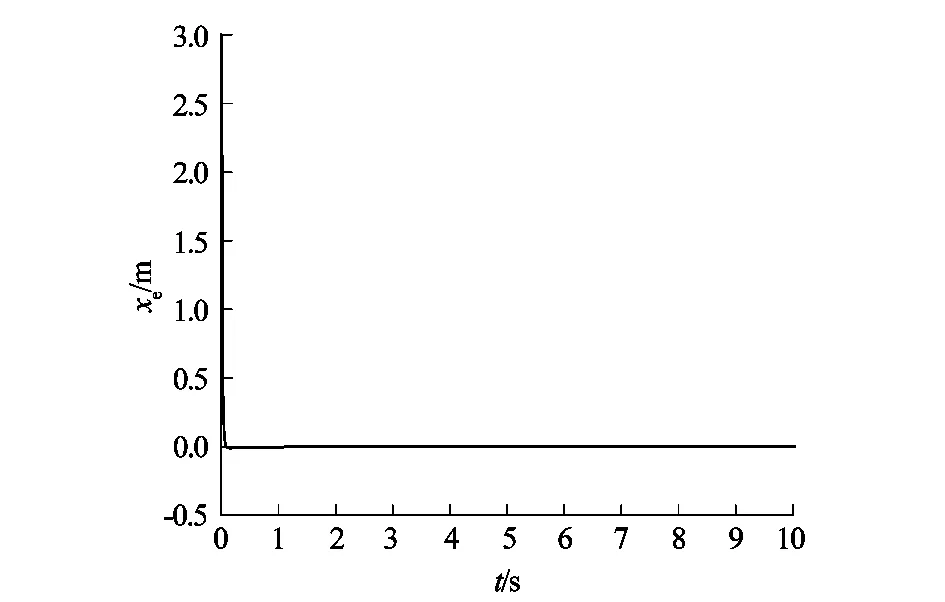
图4 x轴方向误差Figure 4 Axis error in x direction

图5 y轴方向误差Figure 5 Axis error in y direction

图6 航向角误差Figure 6 Heading angle error
为突出控制律式(9)的优势,同样设置初始位姿误差为[3,0,0],vr=1.0 m/s,wr=1.0 rad/s,取上节同样的参数,质心偏移量d=0。对参考文献[10]中的控制律和课题组设计的控制器进行仿真对比。
从图7和图8的对比可以看出,采用课题组所设计的控制律可以更精确地实现对目标轨迹的跟踪。图9~11表明在课题组设计的控制律的作用下,x轴方向误差收敛速度比文献[10]中提前了1 s左右,y轴方向和航向角误差均提前了3 s左右,并且能够更加精确地达到预期目标。
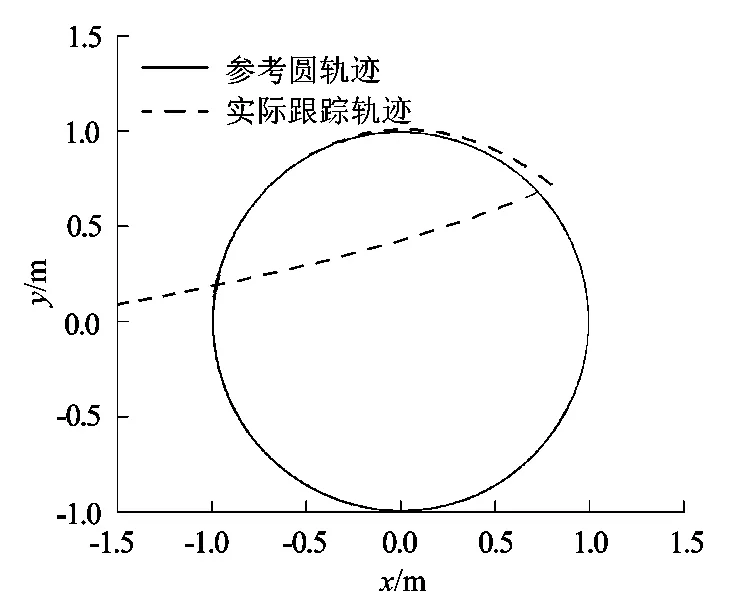
图7 参考文献[10]中控制器Figure 7 Controller in reference [10]
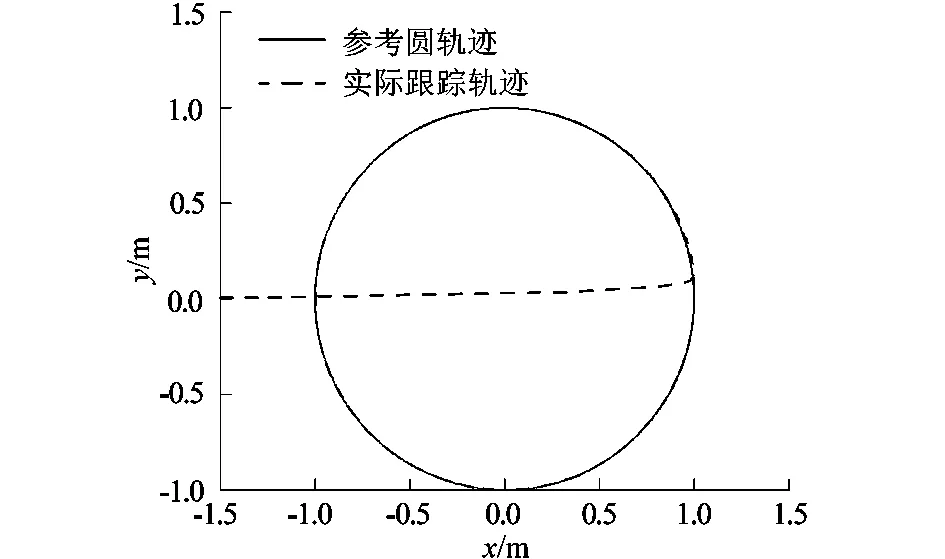
图8 本设计中的控制器Figure 8 Controller designed in this paper

图9 x轴方向误差Figure 9 Axis error in x direction
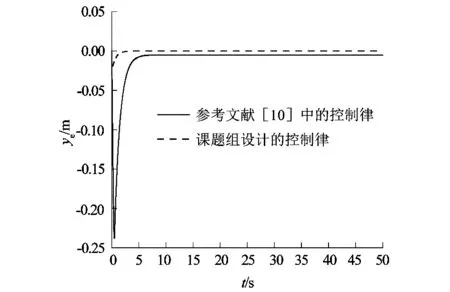
图10 y轴方向误差Figure 10 Axis error in y direction

图11 航向角误差Figure 11 Heading angle error
4 结语
课题组针对质心偏移的阀体搬运AGV运动学模型,在改进滑模切换函数的基础上,引入了基于Lyapunov函数的反馈控制律,提出的新型轨迹跟踪控制律计算简单,有效的提高了阀体搬运AGV的轨迹跟踪精度,使其移动轨迹能够平滑快速地逼近目标轨迹,具有很强的鲁棒性和稳定性,为其它质心偏移的轮式移动机器人轨迹跟踪控制器的设计提供了参考。未来如何优化控制算法中的参数将是今后研究的一个重点。另外本研究中的控制器是基于AGV运动学模型设计的,有关动力学特性对质心偏移AGV轨迹跟踪的影响还有待进一步研究。
