电动客车滑行试验的车辆控制研究
2021-07-03梅志斌张强
梅志斌,张强
(1.比亚迪汽车工业有限公司商用车事业群中试中心测试部,广东 深圳 518118;2.比亚迪汽车工业有限公司商用车研究院匹配部,广东 深圳 518118)
前言
在纯电动客车开发阶段,许多试验是由台架实验室代替道路完成的,底盘测功机是整车进行性能检测的主要设备之一。底盘测功机可准确模拟整车在道路上行驶的各种阻力,是完成整车动力经济性等室内试验的必要设备,要想在转毂台架上准确模拟出车辆道路行驶阻力,道路滑行数据的精度将直接影响台架性能试验结果的准确性。
近半年时间,我司C系、K系等多个车型在断电滑行过程中,电机控制器被接连烧坏,车辆趴窝,造成重大损失。经查明,这是由于控制器在大负荷带载状态突然断电时,驱动系统能量无处卸放所导致。为了避免其他车辆在滑行试验中再次出现类似问题,高压电器部门要求所有车辆必须N挡带高压电滑行,并声明车辆N挡状态没有回馈,这种方法经过几个车型试行后发现,滑行数据在底盘测功机上无法完成拟合,而有些拟合完成后的加载阻力曲线在高速段,阻力反而略有下降。
这种结果表明纯电动客车直接采用N挡滑行不能满足测功机加载要求,加载阻力的准确性也无法保证,关于滑行试验如何控制车辆状态仍需深入研究。
1 N挡滑行过程中的电机能量介入
电动车的道路滑行数据在转毂上拟合出现异常,首先考虑是由于滑行过程电池能量参与引入回馈造成。
1.1 N挡有无回馈
确认N挡有无回馈,有一个简单易行的方法,即车辆在转毂上保持N挡,利用转毂的反拖功能使车辆在各个速度运行,此时使用功率计监控整车放电功率,如果N挡时电机没有能量介入滑行(即没有回馈也没有动力输出),那么整车总功率应始终保持不变。反之,整车总功率如果随着车速变化而变化,则说明N挡存在电机能量参与。
对车型1进行转毂反拖滑行,过程数据如图1所示。数据显示高速段(车速50km/h以上)有明显回馈功率,车速越高,回馈功率值越大,功率值大约(1–5)kW。

图1 车型1N挡反拖车辆其车速与整车功率变化曲线
为了证实N挡滑行时电机能量参与是普遍存在的,多个车辆上转毂进行反拖滑行,发现绝大部分车型均有类似现象,即N挡滑行或者存在电机回馈能量,或者存在电机驱动能量。其中电机驱动能量参与,有代表性的数据是车型2在高速段,电机提供(1-3)kW的驱动功率,数据如图2所示。

图2 车型2N挡反拖滑行车速与整车功率变化曲线
1.2 标准对滑行时车辆状态的规定
标准GB/T 12536-2017《汽车滑行试验方法》[1]中的4.4.3.5明确规定:对于带有能量回收装置的试验车辆,应确保变速器挡位置于N挡时能量回收装置不产生驱动或者阻止车辆滑行的力。
1.3 测功机无法准确加载的滑行数据
这种电机有能量参与滑行的数据,测功机无法使用。竞品车车型3强制断电滑行有风险,因此采用N挡滑行,道路滑行阻力数据看似无异常,但最终在转毂滑行完后,拟合二次曲线,即得到转毂加载阻力曲线时发现,高速段速度越大,阻力反而略微减小(抛物线开口向下),而实际在高速段阻力会随车速增加而明显增大,即加载阻力曲线应当开口向上,显然这种结果无法准确给测功机加载,如图3所示:
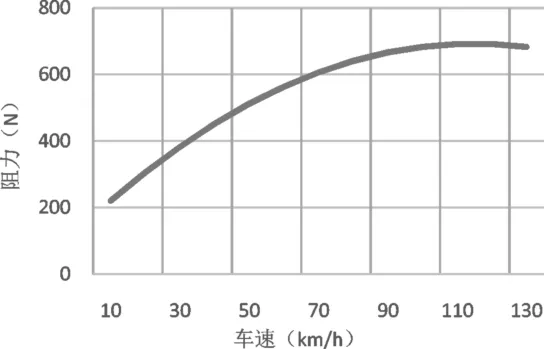
图3 车型3加载阻力曲线
2 N挡滑行有电机能量介入的原因
车辆结构上,电机不可能保持空挡。电机通过主减、行星减、轮胎传递动力到路面,这一机械结构是固定的,无法和带变速箱的传统车一样,保持空挡使电机和驱动轮之间形成机械结构上的脱开,这是N挡下电机能量参与滑行过程的前提条件。
N挡状态下,控制驱动电机通电的接触器是常闭合的,并不会因为N挡而切断电机电流的回路,而电机的扭矩输出主要依赖于整车控制器扭矩指令和电机控制器的控制。控制策略中,N挡的目标扭矩为0,但实际上车辆出厂时,电机初始零位信息未校准,这是控制状态N挡滑行能量介入的根本原因。
永磁同步电机转子位置直接影响电机的转矩控制、速度控制的精度和动态性能,需要安装转子位置传感器来获取转子的位置信息,通常使用旋转变压器(一种传感器,通常称做旋变)来实现。电机和旋变的制造、安装过程存在一定的偏差,这种偏差需要通过电机控制器设定的电机零位参数进行校准,否则会造成控制N挡滑行过程中,电机带来额外的能量参与。
3 N挡滑行带回馈数据无法拟合加载
当得到的滑行阻力功率中含有电机回馈能量或者驱动能量,最终转毂加载数据会和实际道路行驶阻力偏差较大,如下根据底盘测功机的原理进行深入分析。
在道路上进行滑行得到车辆行驶阻力,需要再到底盘测功机上进行拟合。无论车辆在转鼓还是在道路上行驶,车辆内阻都是同样存在的。因此,需要在车辆拟合的过程中去除车辆这部分内阻,才能得到转毂的阻力设定值,即测功机的加载阻力[2]。测功机拟合滑行涉及三个参数:
(1)目标阻力(Target),代表了造成车辆在滑行过程中受到的所有阻力;
(2)车辆损失(Vehicle loss),代表车轮、车轴等形成的阻力,对于驱动轮,无论车辆在测功机上还是在实际路面上,这种力都存在;
(3)测功机加载阻力(Dyno Set),代表为了模拟车辆在实际路面行驶而必须由测功机施加到车辆上的力,这部分力包括车辆行驶时的风阻、前轮阻力等。
这些阻力是一个动态变化的过程,其值会随车速变化而变化,三者之间的关系为:
Dyno Set = Target-Vehicle Loss
在车辆拟合的过程中,转鼓测试自身鼓面阻力 并与道路阻力进行比较,需要重复进行迭代修正过程,当滑行开始后,转毂自带软件运行使用预估的 Dyno Set作为施加力开始滑行。拟合滑行过程中,不断地重复进行如下过程:

直到满足如下要求,拟合滑行才能正常结束:DynoMea-sured-DynoTarget≤设定的精度。正常情况下,转鼓拟合滑行中各个参数间的关系可简化如图4所示,横坐标代表车速,纵坐标代表阻力值:
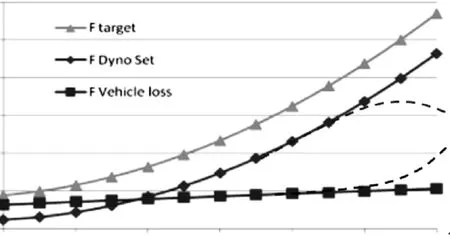
图4 拟合滑行时各个参数变化关系
由于得到Dyno Set的拟合滑行过程中,测功机是先将阻力拟合成曲线得到对应的阻力系数,再执行公式②计算,即相当于曲线减去曲线,而不各个速度下的Target直接减去对应速度的Vehicle loss,因此不能简单理解为变化的Vehicle loss这部分可以直接减去。这是由底盘测功机的工作原理决定的。
当滑行过程中高速段出现回馈能量,Vehicle loss会明显增大,而且随着车速的增加而变大,由公式②可知,此时在对应速度段的Dyno Set会相应变小,这样得到的结果有两种:第一种是测功机最终得到的Dyno Set系数,会使得随着车速增加行驶阻力反而减小(二次曲线开口向下),见图4中曲线虚线部分;第二种是由于回馈能量过大,测功机多次拟合滑行也无法得到满足滑行精度的Dyno Set系数,达到最大滑行次数被迫停止拟合滑行,即拟合失败。
当滑行过程中电机有驱动能量参与时,比带有回馈的情况稍好,虽然滑行阻力曲线经过二次拟合后Dyno Set也可得到开口向上的二次函数,但最终模拟的加载的阻力也不准确。[3]
4 最新滑行试验方案验证
滑行过程中电机有无能量参与,是否会影响最终测功机加载的准确性,关键看这个过程中电机有多大的额外的力传递到车轮,利用底盘测功机的反拖功能,可以测得不同速度下车辆驱动轮的阻力,如果滑行过程中这个轮端阻力(轮边力)和拔掉三相线时的阻力保持一致,则说明滑行过程中没有电机能量参与,反之则有。
经过反复试验发现,利用底盘测功机的损失补偿功能,可自动的将车辆反拖加速到各个指定速度,然后自动记录各速度的轮边力,这种过程可以避免人为读数的误差(直接反拖测轮边力需要手动记录各个速度的阻力值,通常转毂拉压传感器反馈的力值跳动较大,肉眼不容易读出准确数据)。
车型4验证车辆不同控制状态下驱动轮的阻力是否有差异,在底盘测功机损失补偿界面以10km/h间隔设定车速(10-100)km/h。车辆预热完后,执行损失补偿测量,得到车辆的不同车速下的阻力值,即车辆内阻,数据汇总成曲线,如图5所示:
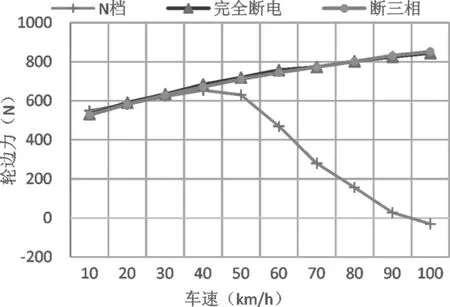
图5 车型4不同状态下各车速的轮边力
数据表明,在完全断电状态滑行时,车辆内阻和断三相线时几乎完全一致,即断电状态时电机没有能量参与滑行。而直接控制N挡状态,电机有明显的能量参与,不满足测功机加载要求。
可以初步得出两种滑行试验控制车辆状态的思路:第一,控制断电状态滑行,可以满足滑行准确性要求;第二,使用N挡状态滑行,利用上述验证方法,如果N挡状态测得车辆内阻能够和断三相线时(同完全断电状态时)的内阻保持一致,那么就能使用N挡状态滑行。
经过评估,某些车辆如果行驶中突然强制断电,烧控制器的风险无法完全避免,从车辆安全的角度出发,尽可能不使用断电状态进行滑行,那就要着手研究如何保证N挡滑行电机能量不参与。
通过上文分析,电机初始零位校准可以尽可能避免N挡状态滑行时电机能量参与。但电机标零位涉及多个部门协同工作:电机厂提供零位信息、电控厂提供零位标定上位机、电器部门实车标定。零位标定流程梳理清晰后,于是着手安排试验验证。
车型5拿到电机出厂零位信息,标定完之后,在转毂上执行转毂反拖测量驱动轮内阻,断电与N挡状态内阻对比结果如图6所示:
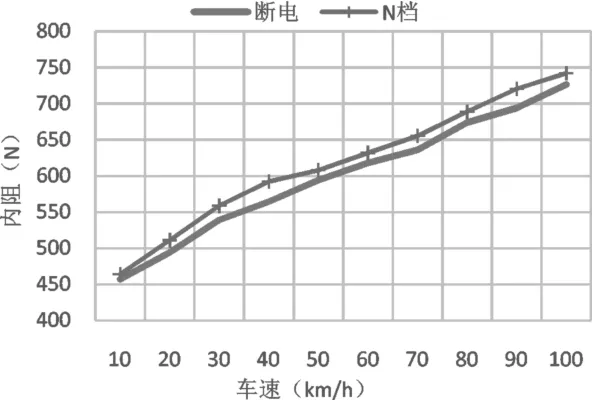
图6 车型5 断电与N挡内阻对比
数据表明,这种偏差在车辆行驶阻力中占比完全满足偏差≤2%的要求。通过对多辆车的零位信息标定,对比N挡与断电状态下的内阻,发现偏差均满足要求,最终确认电机零位标定准确时,可以采用N挡状态进行滑行试验。
5 结论
(1)车辆N挡滑行时,若电机有明显的能量参与,最终测功机无法得到准确的加载阻力或者测功机无法完成拟合;
(2)车辆完全断电状态时,电机没有能量参与滑行过程,准确性较高,但断电状态滑行导致烧电机控制器的风险无法完全避免;
(3)准确的标定电机零位后,可以控制车辆N挡状态进行滑行试验,其准确性满足试验要求,推荐使用。