基于改进遗传算法的变电站巡检机器人行驶轨迹优化
2021-07-02陈玮光胡晓静郑鑫马兆兴陈昊
陈玮光,胡晓静,郑鑫,马兆兴,陈昊
(1.国网江苏省电力有限公司检修分公司,江苏 南京 211102;2.许昌开普电气研究院有限公司,河南 许昌 461000;3.青岛理工大学 信息与控制工程学院,山东 青岛 266525)
随着通信和信息技术的进步,变电站机器人的应用不断深化,从执行简单作业(照片拍摄、红外测温)的日常巡视功能机器人,正在向具有较复杂作业功能的巡检机器人转化。
以变电站内端子箱巡检为代表,开、关室外箱柜门巡检是变电站运维检修人员的重要工作。常规方法多以人工手动打开箱柜为主,随着人工智能技术和5G的发展,尤其是人工智能技术的提高,机器人的大规模普及成为可能[1-6],并将逐渐代替人工手动打开方法。其中提升机器人的寻址打开效率、缩短寻址时间是应用的关键,这一技术也为未来无人值守智能变电站和下一代电网的发展提供助力[7]。在电力系统计算和工程应用中,包括风电预测、轨迹优化等诸多方面出现了很多智能优化算法[8-11],它们在应用中展现了较好的收敛性。在解决大规模计算问题时,遗传算法有着自身的优点,如收敛速度快、计算精度高、全局性好等。在电力系统分析中:文献[12]应用遗传算法对电网运行中需要安装最少的电表数量进行计算,这种方法对于减少设备安装数量和提高电能质量有一定好处;文献[13]应用反向传播(back propagation,BP)网络实现机器人在线路巡检中的应用;文献[14]运用遗传算法对风电场集电系统的拓扑进行优化,降低了投资成本;为提高输电线路弧垂测量方式的准确度,文献[15]建立系统误差求解模型,应用遗传算法求解系统误差,提高了精度。有些研究者根据遗传算法的特点,扩大其应用[16-22]:文献[16]应用进化遗传算法对电力系统的联合调度进行优化求解;文献[17]用遗传算法对空间机械臂的活动轨迹进行优化;文献[18]基于遗传算法,对高频变压器的绕组结构进行优化设计;针对柔性输电系统,文献[19]采用改进遗传算法进行最优潮流计算,并考虑了换流器的特点,取得良好的效果。
对变电站设备进行检修,需要首先找到站内箱柜,然后才能打开箱柜门;因此,首要任务是巡检机器人找到箱柜在站内的具体位置,在本文中称这一过程为寻址。若变电站需要寻址点的总数为n,理论上可行的路径数为n!。当n很小时,可以方便地寻址,对总寻址路程影响不大;但当n很大时,得出优化路径对寻址总路程的影响将非常大,而大型变电站的寻址点普遍较多。因此,研究变电站机器人寻址路径的优化问题具有非常重要的实际意义和理论意义。
遗传算法是一种启发式算法,且比较成熟,特别适用于求解大规模优化问题。本文基于改进遗传算法对变电站箱柜巡检机器人的行驶轨迹进行优化。首先,给出机器人寻址的数学模型,对变电站实际平面图进行网格化处理;然后,应用改进遗传算法得到箱柜巡检机器人的最优寻址行驶轨迹,解决提高寻址效率的关键问题;最后,通过变电站仿真算例验证本文所提分析方法的效率。
1 寻址机器人行驶轨迹建模
1.1 寻址模型设定
寻址机器人出发点为站内任意点,寻址开始后要经过站内所有的箱柜寻址点,寻址时从出发点到第1个寻址点的距离忽略不计;若机器人电量不足,则要停止对箱柜的寻址并返回充电桩,进行自动充电。为了便于优化计算,用网格化坐标来表示变电站内平面图的每个箱柜寻址点。
1.2 模型建立
a)优化目标函数建立。在1次寻址过程中,1个设备只被寻址1次,并且机器人的行驶速度是一定的,因此提高寻址效率、缩短寻址时间主要在于缩短机器人寻址的总行驶距离,其中缩短寻址总行驶距离的方法便是找到最优的设备寻址顺序。为了适应优化算法和变电站的实际使用工况,本文以机器人最短总行驶距离为优化目标,建立优化目标函数
(1)
式中:Mdis为机器人的最短总行驶距离;dk,i,j为机器人k从寻址点i到j的行驶距离。
b)行驶距离计算。为精确化计算变电站不同地点的距离,本文将变电站的平面图进行网格化处理,对每个网格依次编号,并进行坐标设置,处理过程如图1所示,这样使得计算分析更为清晰。

图1 变电站平面图网格化Fig.1 Schematic diagram of substation plan meshing
如图1所示,将变电站坐标网格化处理后,每个寻址点都有明确的横纵坐标,因此任意2个寻址点i、j之间距离
(2)
式中:li、lj分别为寻址点i、j的横坐标;wi、wj分别为寻址点i、j的纵坐标。
以式(1)为目标函数,在求解多目标优化过程中,本文采用改进遗传算法,将变电站所有寻址点编码,以行驶里程最短为目标函数求得最优解,找到最优的设备寻址顺序。这样不仅使得目标最优,也提升了机器人的寻址效率。
1.3 约束条件
a)剩余电量约束。机器人电量消耗至10%时,停止寻址,返回充电桩进行充电。
b)行驶距离约束。机器人在行驶时,要求行驶的总路程不大于按顺序寻址,完成全部寻址点所行驶的总路程,即
(3)
2 改进遗传算法的设计与分析
2.1 种群初始化设计
本文将站内所有寻址点编码,寻址点可以写成如{x1,x2,…,xi,…,xn}表示的序列,其中xi表示第i个寻址点。初始种群设置为理想的均匀分布,有助于算法寻优。
2.2 适应度函数设计
适应度是指种群个体对环境的适应能力,适应度值越大对环境适应能力越强,表明算法对目标进行优化的能力也越强。适应度函数的选取方法有很多,本文适应度函数
(4)
式中a为参数,a≥0,根据计算需要适时修正。本文在设置参数a时,按如下原则进行:设当代目标函数中最小个体为ymin,所对应目标函数为Mdis(ymin),则a=Mdis(ymin)。
2.3 交叉与变异设计
本文对个体编码后,寻址过程中遵循对每个寻址点只寻址1次,因此在编码后的基因中不能存在重复,本文在计算过程中采用改进交叉算法[23-27],具体过程如图2演示。

图2 交叉算子生成演示图Fig.2 Demonstration of cross operator generation
本文改进变异算子采用两点对换方法,变异最终结果为变异停止时发生变异的个体所处状态,且变异次数不大于5,具体过程如图3演示。

图3 变异算子生成演示图Fig.3 Demonstration of mutation operator generation
2.4 选择算子设计
本文采用改进的选择算子,根据个体的适应度决定该算子是否被保留,若个体的适应度较大则被保留遗传下去的概率较大,反之,则容易被淘汰。该方法能够使得适应度高的个体不被破坏,还可以加速剔除劣质个体。个体是否得以保留,按概率公式进行计算,式中:g为遗传概率;yt为第t个个体;T为个体数目。
(5)
相较于简单的交叉、变异,该选择算子能够将优秀基因保留下来,提高计算效率。其执行流程如图4所示。

图4 选择算子执行流程Fig.4 Flow chart of selection operator
与常规方法相比,改进的遗传算法在一定程度上能避免陷入局部最优解,这样算法在搜索机制上能较好地遍历所有的寻址点,得到最优寻址结果。
3 仿真计算及优化结果分析
3.1 场景分析
现设定变电站内有固定巡检线路10条,机器人要在每条路线上寻址,充满电的最大行驶里程为60 km。当剩余电量为10%时,按经验,机器人必须要及时充电,此时机器人停止寻址,并自动返回进行充电,充电完成后以既定优化结果继续寻址。
变电站的线路平面图如图5所示,并假设机器人处理器有一个站内线路的电子地图,寻址过程中将遵循电子地图行驶。

图5 变电站简易平面图Fig.5 Simple diagram of substation
设变电站南北长约400 m,东西长约300 m,网格化变电站时,设置每个网格单位为1 m,此时每个网格便是长宽均为1 m的小格子。若某个设备较大,可能占据多个格子,以该设备中心点处所在的坐标为准。设置大型500 kV变电站室外箱柜需要的寻址点共有500个。为体现一般性,寻址点随机分布在站内。机器人充电桩设置在站内,其坐标为(0.001,0.1)。
3.2 计算及优化结果分析
在理论上,遗传算法的遗传代数越多,其精度越高。本文在计算过程中发现,遗传1 000代后,其优化精度不再明显提高;因此,在以下的仿真计算中,遗传设为1 000代。
a)工况1:设定机器人还有剩余电量100%,在站内任意选一点开始寻址。
经改进遗传算法1 000代遗传计算,得到机器人最短总行驶距离为41.050 km。若不应用改进遗传算法进行优化,机器人按照寻址点顺序编号进行寻址,其总行驶里程为47.335 km。
计算结果表明,优化遗传算法后,总行驶距离明显缩短,机器人寻址效率提升15.309%。采用改进遗传算法的计算结果如图6所示。遗传算法在计算过程中,会不断寻找最优解,每代的计算结果中,最佳值为所有计算解(即所有个体)中的最优解,平均值则为所有计算解的平均数值。

图6 改进遗传算法寻址计算结果(工况1)Fig.6 Addressing calculation results of the improved genetic algorithm in working condition 1
图6计算表明,本文应用改进遗传算法的结果稳定性好。计算用时24.91 s,收敛速度快。
b)工况2:设定机器人剩余电量20%,在站内任意选一点开始寻址。
因剩余电量20%,所剩电量不足以完成全部寻址,因此寻址分2次进行,当剩余电量为10%时,自动停止寻址,机器人返回充电桩充电,待充电完成后再继续寻址。优化过程中计及返回充电的距离,并且第1次寻址距离要求小于6 km,前后2次得到机器人最短总行驶距离为41.319 km。若不应用改进遗传算法进行优化,机器人按照寻址点顺序编号进行寻址,其结果见表1。

表1 不同计算方法的行驶距离Tab.1 Driving distance of different algorithms
表1中计算结果表明:优化遗传算法后,总行驶距离明显更短,机器人寻址效率得以大幅提升;剩余电量10%时,寻址自动停止并返回充电,能够应对寻址途中出现的电量不足问题。采用改进遗传算法的计算结果如图7和图8所示。图7和图8计算结果表明,本文应用改进遗传算法的结果稳定性好,能够适应不同工况,有较好的鲁棒性。

图7 改进遗传算法第1次寻址计算结果(工况2)Fig.7 The first time addressing calculation results of the improved genetic algorithm in working condition 2
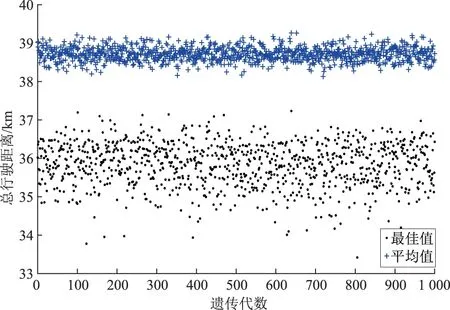
图8 改进遗传算法第2次寻址计算结果(工况2)Fig.8 The second time addressing calculation results of the improved genetic algorithm in working condition 2
由于电量不足,总寻址分2次进行,中间有充电环节。在2次寻址中,通过优化和未优化的遗传算法寻址结果对比可看到,优化遗传算法后的寻址效率提升13.952%,这对大型变电站日常巡检工作是非常有利的,也验证了本文所提方法的有效性和实用性。
4 结论
本文介绍了基于改进遗传算法的机器人寻址在变电站巡检工作中的应用模式,对巡检机器人的寻址轨迹进行优化。在优化分析过程中,涉及遗传算法和寻址轨迹优化两部分内容,得到的结论如下:
a)将优化结果与未实行优化的寻址结果相比,结果表明本文所提方法能够在相同的时间内完成更多设备的巡视工作,可以大幅提高变电站机器人巡检效率,并且使得巡检机器人可以在站内任意位置开始巡检工作,使用方便,原理清晰。
b)多种工况下的计算结果验证了本文所提方法有较好的鲁棒性和稳定性。计算结果也表明了本文所提的变电站巡检机器人寻址轨迹优化具有良好使用效果,为变电站智能运检建设提供了一种创新型的设备巡视和监测手段。
后续研究,作者将考虑变电站实际场地的多种障碍对巡检机器人的影响,研究变电站有多个机器人协同巡检的优化运行,以更真实的场景反映到巡检过程中。
