直流近区稳控系统动作时序的仿真与优化研究
2021-07-02陈勇常东旭李胜男朱益华郭琦
陈勇,常东旭,李胜男,朱益华,郭琦
(1.云南电网有限责任公司电力科学研究院,云南 昆明 650217;2.南方电网科学研究院有限责任公司 a.直流输电技术国家重点实验室;b.中国南方电网公司电网仿真重点实验室,广东 广州 510663)
随着昆柳龙特高压多端混合直流工程的投产,南方电网已形成“八交十一直”500 kV及以上电压等级“西电东送”大通道[1-2],电网安全稳定运行特性复杂,驾驭难度大,安全稳定控制(以下简称“稳控”)系统不正确动作已成为影响电网安全稳定运行的主要威胁之一[3-4]。南方电网各回直流输电送/受端(以下简称“直流近区”)、交流近区都配套设计了规模庞大的稳控系统,控制策略涉及对象繁多而复杂[5-11],交直流互相影响,切机、切负荷容量巨大,对保障电网的安全稳定运行至关重要,稳控系统的任何一个细节设计出错均可能出现较为严重的后果。
稳控系统是由安装于多个厂站的稳控装置通过电力系统通信网络构成的庞大而复杂的二次控制系统[12-14]。在电网故障过程中,稳控系统参与策略计算的某些元件采集量与控制对象的运行状态都在实时变化,对数据的采集和辨识需要考虑动态因素的影响;同时,电网短时间内相继发生多重故障时,也需要协调系统各厂站的控制措施,保证控制策略的最优化执行。因此,稳控系统正确识别故障中各元件的实时状态变化并按照正确的动作时序执行策略,是保障稳控策略可靠执行的基础。国内部分学者对此开展了相关研究[15-20],针对具体的稳控系统工程应用中出现的具体问题,提出了对应的解决方案,但尚未有系统性或原则性的控制策略设计。稳控系统传统的静态模拟试验不能实时动态地模拟系统潮流和运行状态的变化,不易发现稳控系统软件设计中时序配合不当的问题,且交直流系统相互耦合,控制特性复杂;因此,需要基于实时数字仿真系统(real-time digital simulation system,RTDS)和实际直流控制保护系统构建实时仿真平台,开展稳控系统实时动态仿真试验,校验稳控系统的可靠性。文献[21-23]针对部分直流配套稳控系统展开了实时仿真应用研究,取得了一定的研究结果。
本文基于近年来南方电网直流近区稳控系统实时仿真试验研究的成果,对稳控系统动作时序相关的典型仿真试验案例进行系统性的分析,包括主辅判据时序配合、数据采集量有效性辨识以及多厂站稳控策略协调配合等,总结提出稳控系统软件设计的部分经验和原则,为后续直流近区稳控系统的设计提供参考和借鉴。
1 稳控主辅判据时序的配合与优化
一次系统在受到故障冲击后,故障近端电网各电气元件的功率将经历大幅度的波动,稳控装置采集的电压、电流以及计算的功率、频率等都快速变化。针对电网发生故障,稳控策略设计中为了确保可靠性,不但要求确认本元件故障(称为“主判据”),同时要综合考虑到电网内相邻元件的潮流和状态变化信息(称为“辅助判据”),当控制策略的主判据和辅助判据均满足动作条件时,稳控系统才会动作出口执行控制措施。辅助判据的主要作用是防误动作,因此一般设计得较为简单和宽松[15]。在故障过程中,主判据和辅助判据对应的采集模拟量都在实时发生变化,策略设计往往只关注主判据的设计,而忽略了辅助判据设计的严谨性,造成误判。
如500 kV某换流站作为直流的受端,通过L1、L2双回和L3单回共3回线将3 000 MW直流功率送入电网负荷中心。当L1、L2双回故障停运后,剩余的L3线发生过载,需稳控系统执行回降直流功率,以消除过载。L3线过载的主判据为:①L3线过载电流IL3大于过载电流定值Iset,且L3线过载功率PL3大于过载功率定值Pset;②L3线过载延时大于过载延时定值Tset。
基于辅助判据仅用于防误的设计原则,L3线过载策略的辅助判据采用2个简单的条件实现:①L1、L2线功率之和突降量ΔP大于功率突降量定值ΔPset;②L1、L2线实时功率之和Pk小于低功率防误定值PL。
为了重点验证上述辅助判据设计的可靠性,开展表1的试验项目。

表1 L3线过载试验项目Tab.1 The overload testing item of transmission line L3
试验录波如图1所示,事故后L3线的电流和功率均超过定值,线路过载的主判据满足;但根据过载动作时刻,L1线功率为0,L2线实时功率为1 305 MW,ΔP=255 MW<ΔPset(800 MW),L1、L2线的实时功率之和为1 305 MW,远大于PL(50 MW),2个辅助判据均不满足,但装置仍判别L3线过载策略动作,执行了回降直流功率措施,与预期结果不符合。
根据图1的开关量波形分析,因本试验模拟的L1线出口处“三永”故障,故障时刻三回线的电压均跌落到0附近,装置计算的实时功率也为0或小于0,使得故障过程的功率突变量及低功率2个辅助判据均满足条件;同时,装置软件在动作整组中对L1、L2线功率和突变量满足信息和功率低信息进行了完全的保持,如图1(a)的装置录波,导致了2个防误判据均失效。

图1 L3线过载试验项目的装置录波Fig.1 Device wave recording of the overload testing item of transmission line L3
本案例表明,稳控装置在进行辅助判据的实时判别时,需要根据策略表的设计目标进行合理的确认和展宽延时,躲过故障中的暂态过程,正确辨识出与稳控系统策略表匹配的一次系统运行状态,才能确保稳控策略执行的可靠性。为了解决上述问题,对L1、L2线功率突降ΔP满足和低功率防误2个信息进行了优化:
a)上述2个信息满足经2个周波的确认,以躲过稳控装置计算功率所使用的最小时间窗;
b)上述2个信息一旦满足则保持10个周波,并非整组内一直保持,使得装置能够对故障过程中采集的功率变化量进行实时跟踪。
经过上述修改后,对该条策略重新验证并针对性地设计多条试验项目,稳控系统均能够正确按照策略表执行,如图1(b)所示,证明了优化方案的有效性和可靠性。
2 稳控数据采集量的有效性辨识与优化
在稳控装置的设计中,其控制对象一般锁定为装置启动前200 ms时刻的数值(稳态值),不考虑其在故障过程中的波动。但在部分应用场合,由于特殊的系统接线方式、多重控制来源或连续控制等策略设计的要求,需要考虑故障过程中控制对象的投停和功率变化等情况,采取合适的数据取用原则,保证采集量信息的有效性。
如某电站装机9×700 MW,机组序号为10—18,通过甲、乙、丙三回线送入换流站经直流送出。当三回线发生“N-2”故障时,需要根据事故前电站的送出功率执行切机措施,预设的固定切机顺序为18→15→12→16→14→11→17→13→10。基于RTDS实时仿真试验系统模拟甲线“三永”故障跳甲乙双回,稳控系统策略正确动作;但经多次试验发现,部分试验项目装置切机并没有按照预定的切机顺序执行。虽然切机量相同,但切机选择有时为18、15、12、16、17号机组﹝图2(a)﹞,有时为18、15、12、16、13号机组,具有一定的随机性。

图2 策略优化前后的切机选择组合对比Fig.2 Comparison of generation cutting selection before and after strategy optimization
根据稳控装置说明书中对切机原则的描述,电站三回出线与相应机组为4/3接线配串,当机组边开关检修时,出线跳闸会联切掉同串机组。因机组与检修开关的对应关系组合过多,装置软件进行简化处理:装置判别启动前投运、启动后停运的机组为出线故障跳闸联切掉的机组,程序中将该机组的优先级排序提前,供本地策略动作时切除,当系统发生故障时优先切除满足上述逻辑的机组。
当甲线发生“三永”故障时,电站母线电压为0,根据RTDS录波,10号、17号机组在故障过程中的功率快速跌落到最小约为0,如图3所示;但机组电流在故障时远大于投运电流,所有机组均应判为投运,装置应仍按预设固定切机顺序执行,不改变切机顺序。
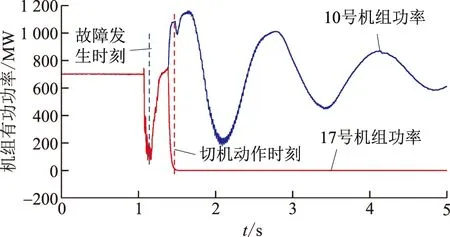
图3 装置动作时的机组功率录波Fig.3 Power wave recording of the generators in case of device action
经核查装置软件,发现在处理装置判别启动前投运、启动后停运的机组时,采用的判别条件为:①事故前机组功率P≠0;②事故后机组功率P=0。同时满足条件①和②,即认为该机组已跳闸,并将其统计到已切机组,优先选择。在甲线“三永”故障时,若装置计算的机组功率恰好为0,则满足上述判别方法,优先被选择切除。由于机组功率P=0是一个确定值,没有设计任何误差范围,且每次试验时装置采集和计算的数据均有细微的偏差,如图3中虽然10号、17号机组在故障过程中的功率波形完全重合,但由于稳控装置功率计算的偏差,17号机组被优先选择切除,但10号机组却没被优先选择(没有功率P=0的计算点),由此导致了切机随机性。目前现场稳控装置均为双套配置,在最不利的情况下,虽然双套稳控系统计算的切机量近似,但切机选择对象可能完全不一致,导致所有机组均被切除,造成极为严重的后果。
基于以上分析,稳控装置将上述判别的条件②修改为“事故后机组停运”,即电流和功率同时小于机组投运定值且经延时,这样就可以有效躲过故障过程中机组功率的波动。装置软件修改后,重复同样的试验,切机选择18、15、12、16、14号机组,选择正确,如图2(b)所示;后经大量重复性实验,并对“单永”、相间和“三永”等多种故障形式进行了验证,装置均能正确按照设定的顺序切机,不再受故障中机组功率振荡的影响。
综上所述,在一次系统故障过程中,稳控装置判别元件运行状态时,需要根据自身采样和算法设计的特点,设置合理的门槛定值,并进行适当的延时确认,避免装置误判和控制策略执行错误。
3 故障演化过程稳控装置动作时序配合与优化
稳控系统依赖于多个厂站间的稳控装置通过通信通道按照严格的动作时序实现控制策略,在某些区域稳控系统中,控制策略分散于多个控制站执行,各厂站分别担负不同的控制功能,在系统发生故障时,各厂站的策略需要协调配合,以达到最终控制效果的最优化。在故障后的系统稳定演化过程中,特别是直流近区交直流系统相互作用,可能导致稳控系统的某些通用性判据不适用,需要根据实际情况对稳控系统的逻辑和判据进行全过程的分析和优化,以确保稳控系统的可靠性。
3.1 多控制主站故障时序配合
如图4所示,某直流送端通过L1、L2双回线接入送端交流电网。当L1、L2双回断开后,直流与电厂1、电厂2进入孤岛运行。直流与主网联网运行时,L3、L4双回“N-2”故障稳控策略由电厂2稳控装置执行,根据事故前电厂1、电厂2机组的出力执行交替切2个电厂机组措施;直流孤岛运行时,L3、L4双回“N-2”故障策略由送端换流站稳控装置执行,执行限制直流功率措施。
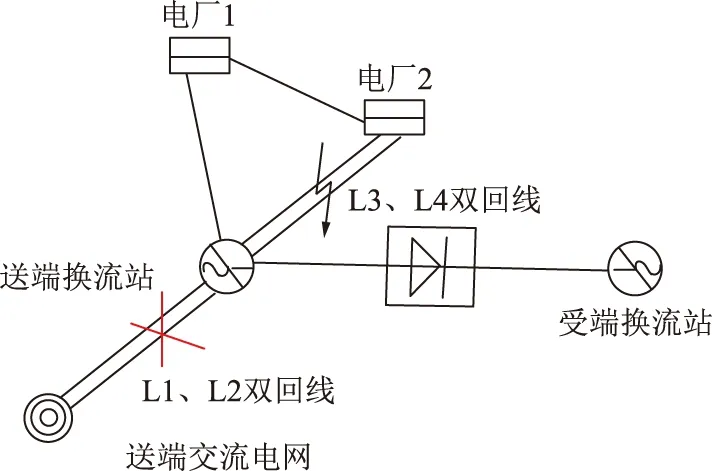
图4 直流送端一次接线Fig.4 Primary connection diagram of HVDC sending end
本文基于RTDS设计了一个多重故障,以验证直流被动进入孤岛(L1检修、L2跳闸)后L3、L4双回“N-2”故障策略执行的有效性,试验项目见表2。

表2 L3、L4双回“N-2”故障试验项目Tab.2 Double line trip testing item of transmission lines L3 and L4
本试验中电厂2和送端换流站稳控装置均未动作,稳控策略拒动。经分析:当L2跳闸时,系统进入孤岛运行状态,电厂2稳控装置实时判断系统运行于孤岛状态不执行切机策略;此时,送端换流站却仍使用事故前系统方式,即联网方式,也不执行限制直流功率策略,相关时序如图5所示。

图5 稳控系统动作时序Fig.5 Action sequence diagram of the strategy test for SSC
分析其原因,电厂2和换流站的稳控装置分属不同的设备制造厂商,2个控制站对采集的数据信息和系统时序处理的原则不一致,使得在发生L3、L4双回“N-2”故障时,2个厂站的稳控装置均认为不属于本站策略表内容而拒动,系统失稳。为了有效解决该问题,要求稳控系统应按照同一故障在同一主站处理的原则配置控制策略,该系统已在后续的升级改造中将L3、L4双回“N-2”故障策略集中于换流站稳控装置,从根本上避免了上述问题的产生。
3.2 故障演化过程中交直流互相影响对稳控策略的影响
如图6所示,总装机量为3 520 MW的电站1和电站2通过变电站1送出,变电站1有2个外送通道,一个是通过L3、L4送出到变电站4,另一个是通过L0线(双回线的另一回检修)送出到变电站3,同时,变电站1近区有两回直流送出,有大容量的配套电源和地区电源。当L3、L4双线跳闸时,L0线容易过载,需采取切除电站1和电站2机组的控制措施。策略设计中,根据其他系统的设计经验,为了防止误判L0线过载,L0线过载的辅助判据为:①L3、L4双线跳闸或停运;②L0、L1、L2三回线事故后功率突增量大于事故前L3、L4双回线功率之和的25%,其中L1、L2线功率方向为变电站1流向变电站2,即均为流出变电站1母线方向。
由此,基于RTDS模拟L0线单线运行,1 s时L3、L4双回线“三永”跳双回故障,动作时序如图7所示。
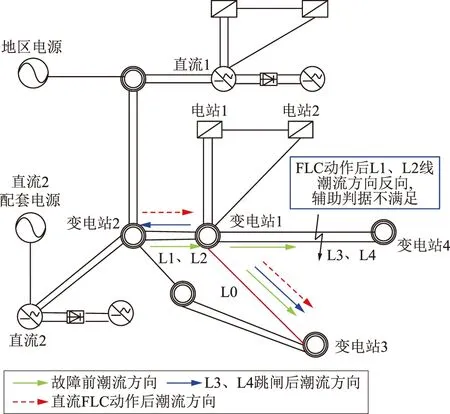
FLC—频率限制控制,frequency limit control的缩写。图6 系统接线Fig.6 System wiring diagram
故障后L0线瞬时功率大于4 000 MW,满足过载动作门槛定值(3 200 MW),同时L1、L2双回功率方向为变电站1流向变电站2,辅助判据2个条件均满足,5.8 s时L0线过载正确动作,按照策略切电站1和电站2共1 920 MW机组。
因切机量较大,系统频率振荡下滑至49.85 Hz以下,区域内直流1和直流2的FLC功能动作,配套机组和地区电压直流送出受限,只能经由交流通道L1、L2送出,L1、L2双回的潮流方向为变电站2流向变电站1,使得L0线再次过载;但由于L1、L2功率方向与辅助判据定义的方向相反,辅助判据的条件②不能满足,L0线过载不动作﹝图7(a)﹞。
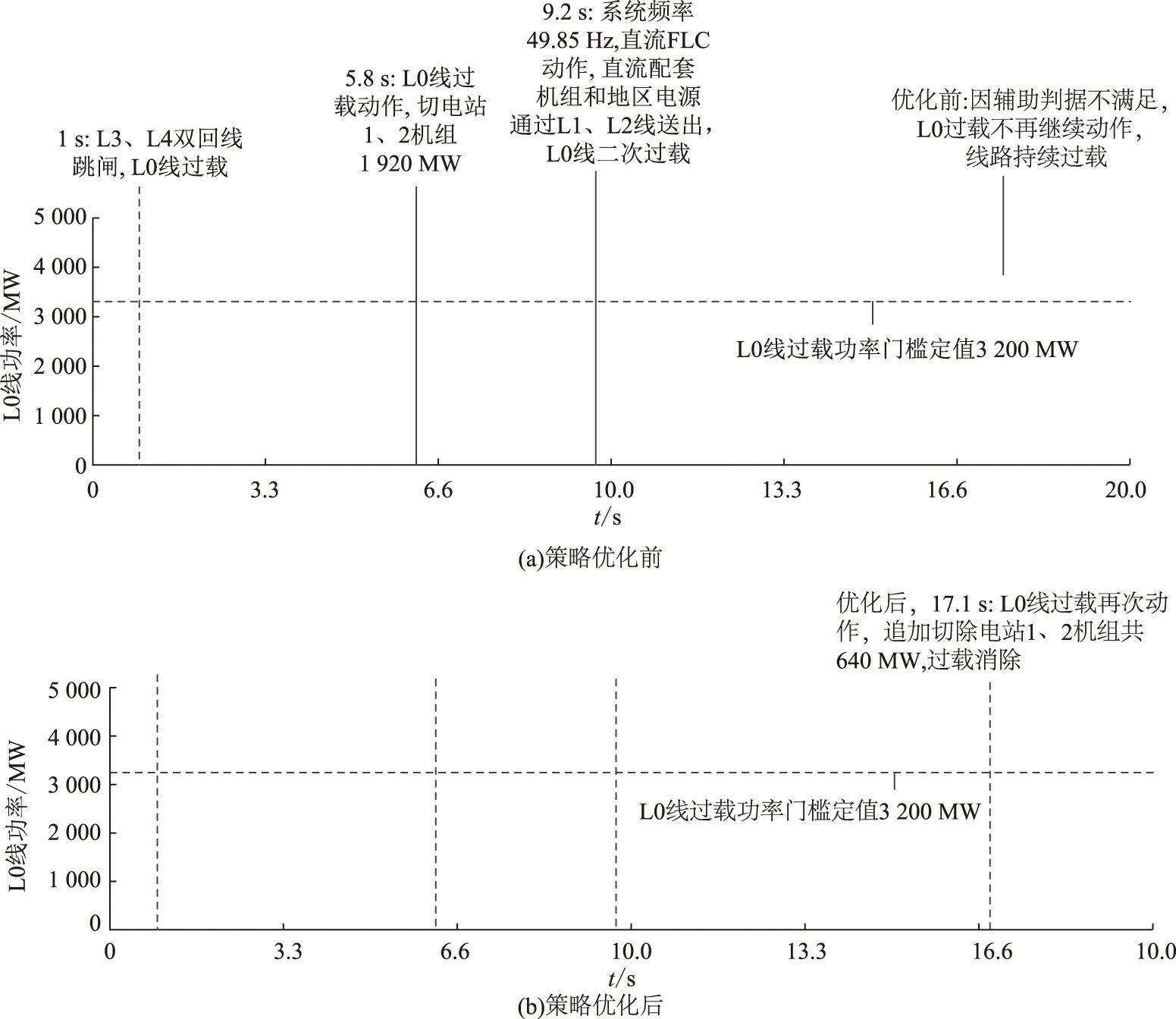
图7 L0线过载策略的动作时序Fig.7 Action sequence diagram of overload strategy of L0
以上问题说明在故障后系统稳定演化过程中,设计过于机械化的判据有可能不满足实际系统的需求,需要进行动态调整。本案例中L0线过载已经包含了辅助判据的条件②,重复设置可能导致故障后交直流系统的相互作用、潮流频繁变化,使得辅助判据不满足,因此可以取消辅助判据的条件②。
经策略优化后,重复上述试验,稳控装置在第17.1 s正确判别L0线再次过载,追加切除电站1和电站2共640 MW机组,过载消除﹝图7(b)﹞,验证了优化措施的有效性。
4 结论
基于RTDS的稳控系统策略验证试验能够完整地校核稳控系统的故障时序识别与配合,发现装置软件中深层次的设计问题,并能够基于试验结果针对性地提出优化改进措施,提升稳控系统的可靠性,可在后续新建或改造稳控系统中推广应用。本文基于典型稳控系统动作时序配合的案例,总结出稳控系统软件设计的部分经验和原则:
a)对于故障过程中变化量的计算,稳控装置软件需要采用合理的防抖动和保持计数算法,以确保取用的变化量满足策略表的设计要求。
b)在处理故障中元件投停门槛时,稳控装置的控制策略必须设计相应的采样误差范围,不应简单地将其量化为某一数值,并应通过电流、功率或电压等多重信息校验。
c)稳控系统多主站时序配合时,必须保证各站装置同步启动,对相同采集数据的处理保持同一原则,应将同一故障的策略集中在一个控制站;在设计稳控系统策略时,需要对已有通用判据重新进行稳定演化全过程的适应性评估,以确保其可靠性。
