机器人辅助训练在腕部本体感觉领域的应用
2021-07-02罗胜利喻洪流倪伟
罗胜利, 喻洪流, 倪伟
1.上海理工大学康复工程与技术研究所(上海,200093)
2.上海康复器械工程技术研究中心(上海,200093)
3.民政部神经功能信息与康复工程重点实验室(上海,200093)
0 引言
脑卒中是世界上三大死亡原因之一,致残率高达80%,脑卒中后6个月,约30%~60%的患者存在不同程度的上肢功能性障碍[1-2]。本体感觉是躯体功能的重要组成部分,研究表明本体感觉障碍可加重患者的上肢运动功能障碍[3-4],本体感觉训练有助于患者上肢运动功能的改善,帮助患者恢复运动功能[5-6]。
本体感觉是骨骼肌、肌腱、关节等运动器官以及皮肤本身在运动或静止时产生的感觉[7-8],包括位置感(position sense)、运动觉(motion sense)和振动觉(vibration sense)[9]。本体感觉障碍患者无法对调整姿势做出正确反应,从而影响患者的正常生活。目前,本体感觉训练技术主要应用在中枢神经损伤、关节置换以及伤残等导致的肢体运动功能障碍患者的康复治疗[10]。
Lorenzo Masia团队利用机器人辅助技术量化了本体感觉的评估指标,系统地绘制了腕手复合体三个自由度的腕本体感觉灵敏度,并表征了腕的位置感,他们的实验结果表明,腕关节的位置敏锐度呈各向异性,且关节位移越小,本体感觉的敏锐度越低[11-12]。也有研究表明短时间的挑战本体感觉的运动训练可以有效增强本体感觉的敏锐度[13],遗憾的是并没有量化敏锐度提升效果。
下面介绍一款用于腕关节训练的康复机器人,并利用该机器人研究了训练对不同工作区域内腕部本体感觉提升效果的影响。
1 实验装置
本研究使用的实验装置是专门用于研究人体感觉运动康复的二自由度机器人装置。机器人的活动范围接近人类手腕的活动范围(70°/70°屈曲/伸展(或30°/30°尺偏/桡偏)和90°/90°旋前/旋后),人体手腕的屈曲/伸展和尺偏/桡偏自由度公用机器人的一个旋转轴。该腕部训练装置设置了两个无刷电机驱动,并配有高分辨率的增量型光电编码器可以在运动过程中读取关节旋转角度。
1.1 机械结构设计
该腕部康复机器人采用了绳驱设计方案。电机集中安放在靠近设备固定位置,通过钢丝绳将电机输出动力传递至执行器,钢丝绳的走向通过导向轮完成。与电机直驱的驱动方式相比,这种驱动方式实现了电机集中放置,同时绳索传递动力的做法简化了设备远端关节的结构设计,减轻了设备的重量,减小了设备的体积。
如图1所示,两个驱动电机分别通过两组钢丝绳控制设备的两个关节,通过调整两个关节工作状态实现帮助患者完成腕部三个自由度的训练需求。1号电机控制远端关节运动,可以帮助患者完成腕部内旋/外旋动作训练,2号电机控制近端关节可以帮助患者完成掌屈/背伸或尺偏/桡偏动作训练。当1号电机带动远端关节旋转至与初始状态呈90°夹角时,启动2号电机可以实现腕部掌屈/背伸动作训练,当远端关节保持初始状态不变时,启动2号电机可以实现腕部尺偏/桡偏动作训练。这一设计方式在满足训练需求的同时提高了电机的有效使用率。
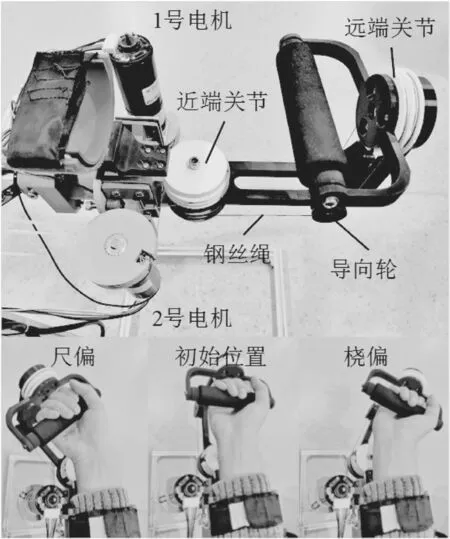
图1 腕部康复机器人Fig.1 Wrist rehabilitation robot
1.2 控制系统设计
控制系统主要涉及下位机控制,其主要作用是给电机驱动器下发指令、采集并记录运动信息以及识别并判断腕部的运动意图,系统架构如图2所示。主控板是下位机控制系统实现的核心,包括STM32F407的主控芯片及最小系统、与电机驱动器之间的通信电路、采集运动信息的编码器采集电路和储存运动信息的EEPROM存储电路、将数据反馈至上位机的串口通信电路等。

图2 下位机控制系统构架Fig.2 Lower computer control system architecture
驱动控制系统采用7段S曲线法,确保加速度曲线平滑连续,减小运动冲击,提高运动的平稳性。对1 000线增量式光电编码器采用4倍频采集算法以提高其分辨率,在同等采样频率的情况下,编码器的精度提高了4倍。
同侧关节位置匹配测试[14]功能是该腕部康复机器人的主要控制控制目标。具体包括受试者对目标位置的主动匹配和机器人带动受试者手腕被动转移。受试者需要主动匹配先前体验过的位置,在这个过程中该腕部康复机器人会记录下人体手腕实际运动位置和目标位置之间的偏差。
2 实验
2.1 受试者
参与研究的12名受试者(年龄25±2岁,其中5名女性,7名男性)均为右利手,没有神经肌肉病史,从未接触过该项试验任务。实验开始前对所有受试者进行爱丁堡利手测验,测验结果表示受试者均为100%右利手。
2.2 实验方案
采用同侧关节位置匹配测试对本体感觉敏锐度进行评估,实验中,受试者被不透光眼罩遮住双眼避免视觉信息干扰,受试者的手腕被机械装置移动到一个固定角度,保持3 s后将手腕移动回初始位置。随后,受试者需要主动与腕关节上的本体感受目标进行匹配。对本体感受目标进行10次匹配测试(机器人检测到手腕停止运动时间超过3 s后将手腕带回初始位置,视为完成一次匹配实验),取10次平均作为测试结果。休息2 min后,对相同的本体感受目标位置进行5 min的学习,学习过程中受试者主动操控机器人匹配目标位置,在目标位置附近停留3 s后高音提示超过目标位置,低音提示未达到目标位置,这个过程中机器不提供任何运动意图干预。
3 结果与分析
3.1 实验结果
训练前和训练后的手腕角度运动信息通过腕部训练装置采集,为更好地估计手腕位置感训练前后本体感觉敏锐度的提高情况,比较了实际手腕运动位置和期望手腕运动位置的差别。匹配误差(ME)的计算可以量化手腕实际运动位置偏离目标位置的大小,其计算方法是在对同一个本体感受目标重复匹配n(n=10)次实验误差的平均值。

式中:θi为手腕实际的运动位置,θt是手腕被期望弯曲的位置,n为匹配实验次数。
匹配误差降低比(MErr)反映了本体感觉敏锐度提升情况。MErr越大,训练后腕部本体感觉敏锐度提升越明显。

式中MEa为训练后匹配误差,MEb为训练前匹配误差。
表1中描述了12位受试者对目标位置匹配误差测试的平均值,其结果显示训练后12名受试者尺偏在习惯区的平均匹配误差降低程度最高(平均匹配误差降低1.77°),接下来是腕部在极限区的表现(尺偏:1.58°,桡偏:1.01°),而桡偏在习惯区的平均匹配误差降低,与训练前相比仅降低了0.66°。从匹配误差降低比来看,腕部尺偏的本体感觉敏锐度提升最明显,且极限区(MErr=44.43%)要好于习惯区(MErr=38.29%),桡偏的结果刚好相反,极限区(MErr=27.02%)要略差于习惯区(MErr=27.26%)。

表1 受试者的平均匹配误差Tab. 1 Average matching error of subjects
3.2 结果分析
12位受试者通过训练,腕部本体感觉的敏锐度均有所提升,这说明训练对提高本体感觉敏锐度是有积极影响的,同时,腕部康复机器人完整记录了试验过程中受试者的运动信息,量化了评估指标,也为进一步综合性探索训练对本体感觉敏锐度的影响提供了原始数据积累。
从12位受试者的实验结果中可以看出,腕部尺偏本体感觉敏锐度提升效果更加明显,这说明较大工作空间的关节运动方向在提升本体感觉敏锐度上具有显著优势。这也许与本体感觉敏锐度随关节运动范围的增大而提升[19]有关。然而,让人意外的是在腕部桡偏的测试结果中我们发现,训练后习惯区的匹配误差降低比竟然与极限区几乎相等,甚至略占优势。有研究表明,训练可以重建或加强脑部运动神经传导通路以提高本体感觉敏锐度[20]。这也许意味着训练频次越高的位置本体感觉敏锐度越高,而受试者腕部在习惯区的使用频次要远高于极限区。此外,还可能是因为桡偏在习惯区的活动角度范围太小以及人体腕部旋转中心与机器人关节旋转中心不是完全重合,以至于腕部训练机器人不能准确地采集到腕部桡偏的实际运动信息。
4 结论
12名健康受试者的实验结果表明,避免视觉干扰的训练对提高本体感觉敏锐度是有效的,且腕部本体感觉的敏锐度的提升随工作空间的增大而升高。同时表明,该款腕部康复机器人能够清晰准确地提供关节运动信息,可以量化运动评估指标,为腕部本体感觉敏锐度的综合型研究提供了非常合适的实验平台。不足之处是该康复机器人在采集小范围运动信息的过程中可能存在处理精度不够、人-机关节对心度不高等问题,在接下来的研究中我们也会重点考虑提高设备的分辨率,也会寻找更为精确的人-机关节对心方式。
