山东CORS站噪声特征分析
2021-07-02席换曲国庆张建霞王晖
席换,曲国庆,张建霞,王晖
(山东理工大学 建筑工程学院,山东 淄博 255049)
坐标时间序列的噪声信息会影响坐标的解算精度,造成测站非线性运动模型一定的偏差,在研究连续运行参考站(continuously operating reference station,CORS)单日解坐标时间序列的噪声时,有学者认为坐标时间序列中仅存在白噪声。随着对噪声进一步地研究发现,GNSS坐标时间序列不仅存在白噪声还存在有色噪声,目前最优随机模型描述为白噪声+闪烁噪声已达成共识[1-8]。唐江森等[9]研究了山东部分CORS站两年坐标时间序列的噪声特征,确定其最佳噪声模型为白噪声+闪烁噪声。由于研究数据时间跨度短,并不能完全反映站点的噪声特征。通常认为时间序列跨度大于2.5 a,能够准确估计时间序列的线性项、周期项及其精度[10]。
因此,本文在已有研究的基础上,以山东CORS站2015年1月1日至2018年12月31日连续4年的坐标时间序列为研究对象,分析CORS站坐标时间序列的噪声特征,以确定山东CORS各站点的最佳噪声模型。
1 噪声特征分析
1.1 噪声序列的获取
GPS基准站的拟合模型[11]可用式(1)表示:
y(ti)=a+bti+csin(2πti)+dcos(2πti)+
esin(4πti)+fcos(4πti)+
(1)
式中:y(ti)为基准站各分量坐标时间序列;a为观测序列的初始位置;b为观测序列线性速度;ti为时间;c、d和e、f分别为年、半年周期项系数;gi为tgj时刻的阶跃;H为一阶梯函数;vi为噪声序列。若顾及更复杂的情况,如某时刻测站运动速率的改变或某一事件发生后测站运动速率呈指数衰减的情况等,可采用文献[12]提供的坐标分量每日解观测序列参数模型。通过对坐标时间序列进行趋势项拟合及去除、小波分析方法探测和提取周期项、修正含有阶跃的站点等步骤得到噪声序列,作为噪声特征分析的数据基础。
1.2 粗差的剔除与插补
坐标时间序列受到外界观测条件、传输信号干扰或电气元器件的突然变化的影响,会存在粗差。粗差的存在会影响噪声特征的分析,应将其剔除,以免造成结果的偏差。采用拉依达准则(3σ)对坐标时间序列的粗差进行探测与剔除,该方法的标准为
(2)

连续均匀采样的坐标时间序列是数据分析的基础,而实际的观测序列并不满足此条件;加之剔除粗差的历元,时间序列总会缺失某些天的数据,因此需利用插值方法将缺失的数据补全。通过对多种插值方法进行对比分析,最终选用最符合数据大致趋势的三次多项式插值法进行插补。
线性趋势项拟合实际上是对坐标时间序列进行零均值化处理,去除趋势项的坐标时间序列称为残差序列。此序列在零附近连续均匀波动,是用于探测与提取周期项的数据序列。
1.3 周期项的探测与提取
小波分析方法是一种可以同时在时间域和频率域分析信号的方法,实现坐标时间序列周期项的探测与提取。其基本原理如下:

(3)
式(3)为小波分解公式。式中:AK、DK分别表示信号第K层的低频和高频部分;H、G分别表示小波低通和高通滤波器;N表示信号长度。
AK=H*AK+1+G*DK+1,K=N,…,2,1,
(4)
式(4)为小波重构公式。式中H*、G*为H、G的共轭转置。
1.4 谱指数与最大似然估计
噪声的功率谱密度P(f)与噪声频率f之间存在着幂次关系,即
P(f)∝fk,
(5)
称k为谱指数。将式两边取对数为
lnP(f)∝klnf,
(6)
k在双对数坐标系中为拟合直线的斜率。不同的谱指数对应不同的噪声类型,k=0为白噪声(wn),k=-1为闪烁噪声(fn),k=-2为随机漫步噪声(rwn)。
最大似然估计是确定不同噪声模型下噪声分量的方法,它是按最大似然准则使得在此噪声模型下噪声序列与其协方差的概率密度最大,其模型[13]为
式中:X为时间序列列向量;σw,σrw,σf分别为白噪声、随机漫步噪声和闪烁噪声;N为序列长度;QXX为X的协方差。
2 山东CORS站噪声特征分析
2.1 山东CORS站数据分析
以山东27个CORS站(图1)三个方向的坐标时间序列为研究对象,在进行了数据预处理后,如剔除粗差与插值、阶跃项修正和去除趋势项得到残差序列。在残差序列的基础上进行周期项的探测与提取,得到噪声时间序列,用于确定噪声类型与估计各噪声分量值,分析山东CORS站的噪声特征。
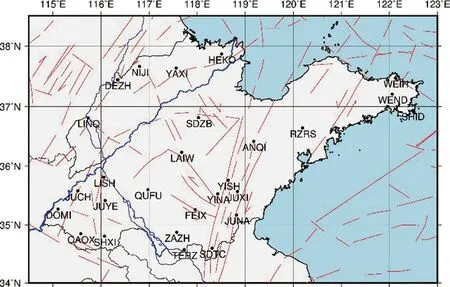
图1 山东CORS站分布
以QUFU站为例,为显示坐标轴刻度,将N、E和U三个方向分别减去参考值(3 962 977 m、10 587 692 m、59 m),图2、图3分别给出了原始坐标时间序列及趋势项和残差序列。由图2、图3可知,QUFU站坐标时间序列水平方向存在着明显的线性趋势。垂直方向不仅存在着线性变化,还存在着周期性变化。残差序列在零附近均匀的波动,说明已具有零均值的特性,可进行坐标时间序列的周期分析。
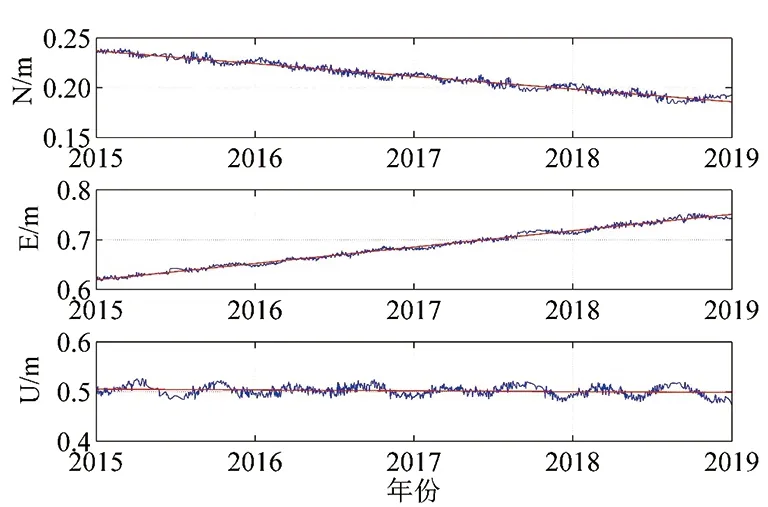
图2 原始坐标序列及趋势项
对QUFU站垂直方向进行小波分析,可得到坐标时间序列中存在的周期项(年、半年、季节周期项),如图4所示。
由此可得到QUFU站垂直方向的噪声序列,如图5所示。按照上述方法可得到山东CORS站的全部噪声序列,为噪声特征分析提供数据基础。
2.2 山东CORS站噪声特征分析
根据式(6)谱指数的定义,计算求得基准站各坐标分量的谱指数,见表1。

表1 基准站各方向谱指数
由表1可知,基准站水平方向的谱指数均在-1~0之间,大部分垂直分量谱指数也在-1~0之间,ZAZH站垂直方向谱指数为-1.011,说明基准站各坐标分量噪声均不具有纯白噪声的特性,且同一测站的不同坐标分量的噪声模型有所不同。因此需根据谱指数逐个确定基准站的噪声模型。为确定基准站坐标分量的最佳噪声模型,根据最大似然估计原理,不同噪声模型的极大似然估计值越大,结果越可靠。本文以ZAZH站为例,计算了五种噪声模型:白噪声(wn)、白噪声+闪烁噪声(wn+fn)、白噪声+随机漫步噪声(wn+rwn)、闪烁噪声+随机漫步噪声(fn+rwn)和白噪声+闪烁噪声+随机漫步噪声(wn+fn+rwn)的最大似然估计值,结果如图6所示。
由图6可知,不同噪声模型对应的最大似然估计值不同,白噪声模型的最大似然估计值最小,说明坐标分量中不仅仅含有白噪声,还含有有色噪声。水平方向上,白噪声+闪烁噪声和白噪声+闪烁噪声+随机漫步噪声的最大似然估计值最大且相等,说明在没有随机漫步噪声存在的情况下,白噪声+闪烁噪声与白噪声+闪烁噪声+随机漫步噪声所估计出来的噪声分量是相同的,因此,ZAZH站水平方向的最佳噪声模型为白噪声+闪烁噪声或白噪声+闪烁噪声+随机漫步噪声;垂直方向上,最大似然估计值为-4 202.15,所对应的最佳噪声模型为白噪声+闪烁噪声+随机漫步噪声。由此可以看出同一基准站的不同方向可以有不同的最佳噪声模型。假设基准站的噪声模型为白噪声+闪烁噪声+随机漫步噪声,对山东地区27个基准站坐标分量在此噪声模型下进行的噪声分量估计统计见表2。

图6 ZAZH站不同噪声模型的最大似然估计值
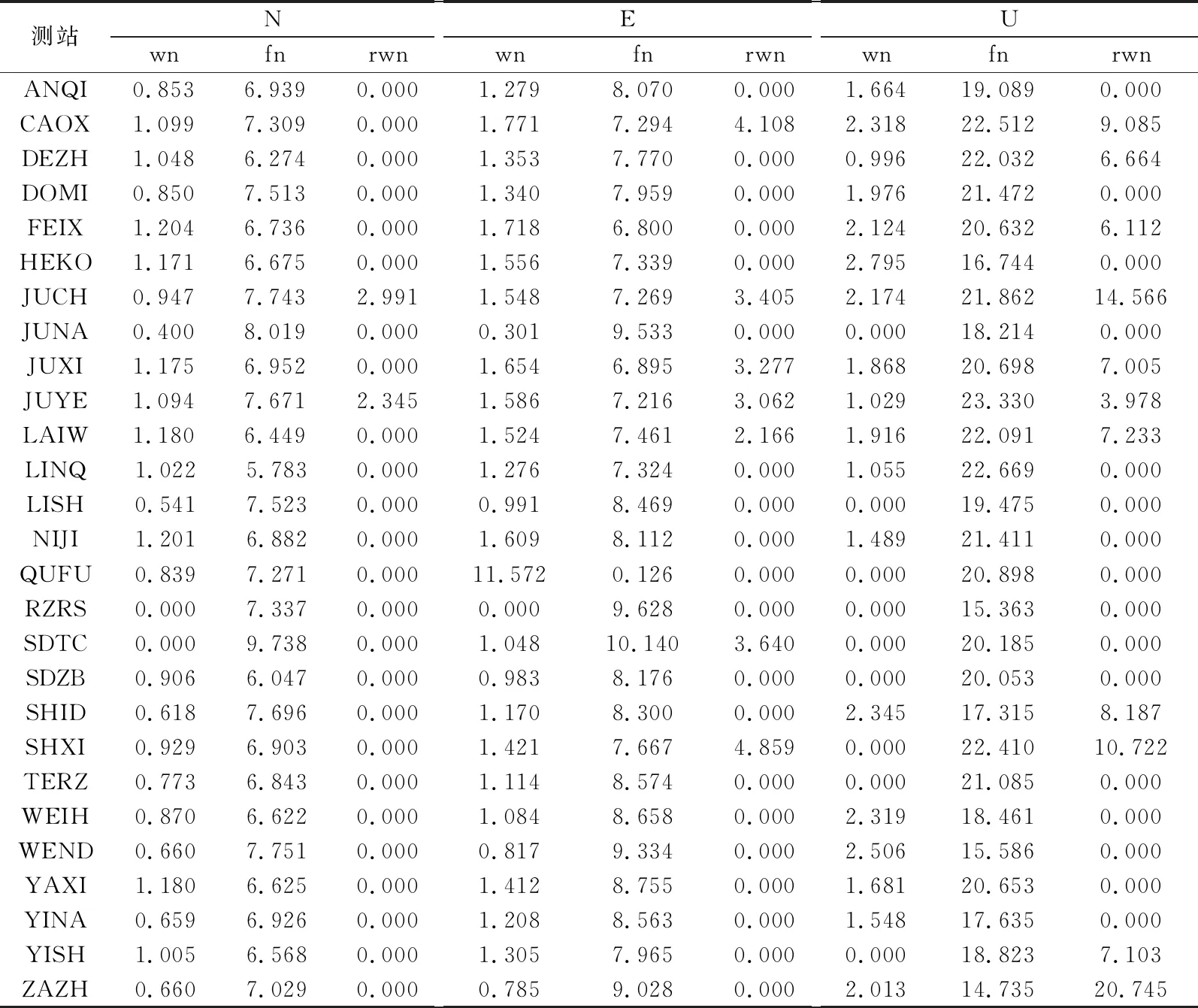
表2 山东CORS站在wn+fn+rwn下的噪声分量值
由表2可以看出,观测时间序列坐标分量具有不同噪声特征。在N方向上,有25个基准站仅含有白噪声和闪烁噪声,2个站含有白噪声、闪烁噪声和随机漫步噪声;E方向上,有20个站点含有白噪声和闪烁噪声,7个站点含有白噪声、闪烁噪声和随机漫步噪声;U方向上有16个站点含有白噪声和闪烁噪声,11个站点含有白噪声、闪烁噪声和随机漫步噪声。因此山东CORS站的最佳噪声模型为:N方向上采用wn+fn模型,E和U方向上采用wn+fn+rwn模型。同时,U方向的噪声分量估计值要明显高于其它两个方向,这与高程方向精度低于水平方向精度的结论是一致的。
3 结论
通过对坐标时间序列预处理得到连续均匀、不含阶跃项的残差序列,再利用小波分析方法提取其周期项,得到不含明显周期项的噪声时间序列,用于分析山东CORS的噪声特征,最终得到以下结论:
1)计算出的谱指数显示坐标时间序列中不仅存在白噪声,还存在有色噪声。在计算基准站的运动速度时,应顾及有色噪声对其的影响。
2) 山东CORS各坐标分量具有不同的噪声特征,可以有不同的噪声模型。N方向的最佳噪声模型为wn+fn,E、U方向的最佳噪声模型为wn+fn+rwn。
