一种变体无人机构型仿真研究
2021-07-02纪鑫东蒋维安
纪鑫东,蒋维安
(中国民用航空飞行学院飞行技术学院,广汉618300)
0 引言
无人机是一种由动力驱动、机上无人驾驶、可重复使用的航空器的简称,英文常用Unmanned Aerial Vehicle表示,缩写为UAV[1]。多旋翼无人机作为航空产品领域的一枝新秀,以新颖的结构布局、独特的飞行方式和广泛的用途引起了人们越来越多的关注和重视,风行全球,迅速成为新的创业、创新研究热点[2]。
四旋翼无人机以其独特的性能,迅速成为旋翼无人机的翘楚,在众多领域中都有着较好地应用。
复杂环境(例如火灾场地或森林搜寻)对无人机的需求较大且较快增长。随着我国城市建设的高速发展,建筑火灾时有发生,造成了人员伤亡和财产损失[3-4]。在火灾的高温作用下,建筑材料的性能迅速劣化,结构构件的承载力下降,极易造成倒塌[5],导致救援通道被阻塞,使人员被困。在灭火救援过程中,消防员需要承受各种极端条件[6]消耗大量时间搬移障碍物,才能找到被困人员。长时间的高温烘烤和建筑材料的二次塌陷还可对救援人员的生命安全造成严重威胁[7-8]。快速探明幸存者的准确位置,对缩短救援时间和减少人员伤亡意义重大。
对在森林中失踪的人员进行搜寻救援的过程中,大部分情况是在崇山峻岭中进行的,常用的方法是通过载人直升机在森林上空进行搜寻。当遇到树木繁多、枝叶茂盛的情况,直升机上的搜寻人员向下观望的视野容易被枝叶遮挡,并且山中时常伴有局部大雾,也会遮挡上空搜寻救援的视线。
随着科技的日益进步,飞行器在救援行动中逐渐崭露头角[9]。无人机作为灾难搜寻救援机器人中的一员,有着得天独厚的优势[10]。尤其是四旋翼无人机可以通过建筑物内部的通道,穿插于各个楼层进行巡视,节省了搜寻时间,提高了搜救效率。与地面无人搜寻器和消防员搜寻相比,还能不接触任何建筑材料从而避免余温造成损伤。对于森林失踪人员的搜寻,四旋翼无人机可以在森林内部进行快速穿插搜寻,既可以克服空中直升机搜寻时遇到的障碍物遮挡视线的困难,又可以大大提高搜寻效率。
现有的四旋翼无人机构型的布局为四个螺旋桨彼此之间间距较大,这样既能保证飞行器飞行过程中的稳定性,又能使各螺旋桨之间旋转产生的气流相互影响最小,减少升力损失。
由于失火建筑物内部及森林内部空隙大小不规则,所以在上述两种环境进行搜寻时,这种固定布局的四旋翼无人机在穿越狭小空间时姿态不灵活,甚至有可能出现旋翼碰撞周围障碍物,造成旋翼破损、飞行器失控的情况。受限于无人机的尺寸与重量之间的矛盾的制约,较大尺寸无人机难以进入狭小空间执行搜寻任务,影响了可达性;较小尺寸无人机的有效载荷小,难以满足复杂空间中搜寻任务的需要。
本文提出一种变体结构无人机,旨在减小无人机搜寻的可达性与有效载荷间的矛盾,扩大无人机在特定搜寻环境下的应用范围。
1 用于复杂环境搜寻的变体无人机构型设计
1.1 构型设计
图1为所设计的变体无人机构型示意图,变体构型上的不同部件分别用数字1至数字7标注,标注1为支撑臂驱动件;标注2为机身中央部分;标注3为机身外围框架部分,该部分与机身中央部分之间为镂空状态,保证无人机在变体过程中的气动特性,同时采用大框架构型,在飞行器变体过程中能够承受变体层的力矩;标注4为双叶螺旋桨;标注5为驱动件转动轴;标注6为支撑臂;标注7为电机。
基于图1里的“变体无人机构型俯视图②”中所标注的位置点字母,AB为支撑臂的旋转半径,四条支撑臂长度相同,BC、CD、DE和BE均为相邻两个驱动件转动轴之间的距离,AF为螺旋桨半径,四个螺旋桨尺寸相同。

图1 变体无人机构型示意
上述新型四旋翼无人机构型的工作原理为四个螺旋桨在电机的驱动下给无人机提供升力,当无人机需要通过宽度较窄的空间时,四条支撑臂在驱动件的带动下绕着转动轴按既定方向均速旋转,以此来改变无人机的构型,实现变体。
基于变体无人机构型的运动原理,既要实现变体,又要实现变体后机身横向尺寸的减小,各设计参数需同时满足下列三个关系:

1.2 构型建模
根据1.1小节中所列出的构型需同时满足(1)(2)(3)三个关系式,选取一组满足条件的具体数值,利用UG软件进行建模,便于进行运动仿真和干涉性检查。
现有四旋翼无人机电机与桨片的选择对应关系如表1所示[2]。

表1 电机与桨片的选择对应关系
为了保证飞行器既具备一定的载运拉力又达到初始尺寸的尽量减小,还能验证方案的有效性,使用5英寸桨搭配2800kV值电机。
经实物测量,5寸桨半径为63.5mm,即AF=63.5mm;实物电机底座直径为20mm,为确保电机底座安装牢靠,支撑臂宽度设计数值为20mm,驱动件短边宽度为20mm,为确保外侧机身框架与驱动件安装牢靠,同时保证机身外侧框架对螺旋桨的气动性影响最小,外侧机身框架宽度选择最小设计值20mm,为保证飞行器机身既能尽量减小又能满足飞行要求,支撑臂半径AB设计为70mm,为满足关系式(3),设计BC=CD=DE=BE=300mm。通过UG(Unigraphics)建立的三维模型如图2所示。

图2 变体无人机建模示意
2 变体无人机构型仿真分析及优化
2.1 构型仿真分析
该设计的最终目的在于无人机通过变体改变自身结构,达到在必要时可灵活缩小机身横向尺寸。通过仿真可以确定该无人机构型在各种变体参数下的尺寸以及是否发生运动干涉现象。
将所构建的变体无人机三维模型导入UG软件运动仿真环境中,在运动仿真环境中,命令连杆、固定杆和运动副,给运动副添加驱动,为了更好了解分析该变体无人机的变体过程,标记并追踪四个运动的支撑臂,建立解算方案,并进行求解,求解结束后进入运动仿真准备阶段,如图3所示为运动仿真环境中模型的俯视图,将此时无人机的四个支撑臂的相对位置称为“初始位置”。
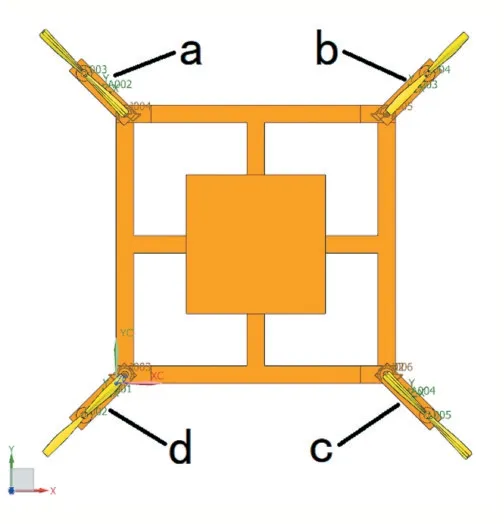
图3 仿真环境中模型初始状态俯视
在无人机变体的过程中,为了彼此抵消力矩,a、c支撑臂绕转轴按顺时针方向转动,b、d支撑臂绕转轴按逆时针方向转动,且每条支撑臂转速相同。
运动仿真结束后,得到如图4所示为四条支撑臂分别绕转动轴转动360°后的无人机构型的俯视图。

图4 标记支撑臂旋转360度后无人机构型俯视
观察图4可以得出,当四个支撑臂分别绕着固定转轴完成360°旋转后,彼此之间无论在何种相对位置,都没有碰撞现象发生。由此可以得到,该设计构型能够实现四个支撑臂的平面360°旋转,并且在此过程中,四个支撑臂和螺旋桨之间不会发生碰撞,能够顺利实现有效变体。
横向尺寸运动仿真验证。
通过观察如图4,选定六个支撑臂旋转到特殊位置(0°、45°、135°、180°、225°和315°)时的状态,完成螺旋桨的运动仿真,验证机身横向尺寸能否因变体而显著减小。得到如图5所示的支撑臂不同位置螺旋桨运动仿真示意图,利用UG软件自带的测量工具,得到不同状态下的无人机构型的XC和YC方向上的最大尺寸数据。
将图5中不同状态下的无人机构型的XC和YC方向上的最大尺寸数据列于表2,令初始状态XC和YC数值为单位1,不同状态与其进行对比,如表2所示。
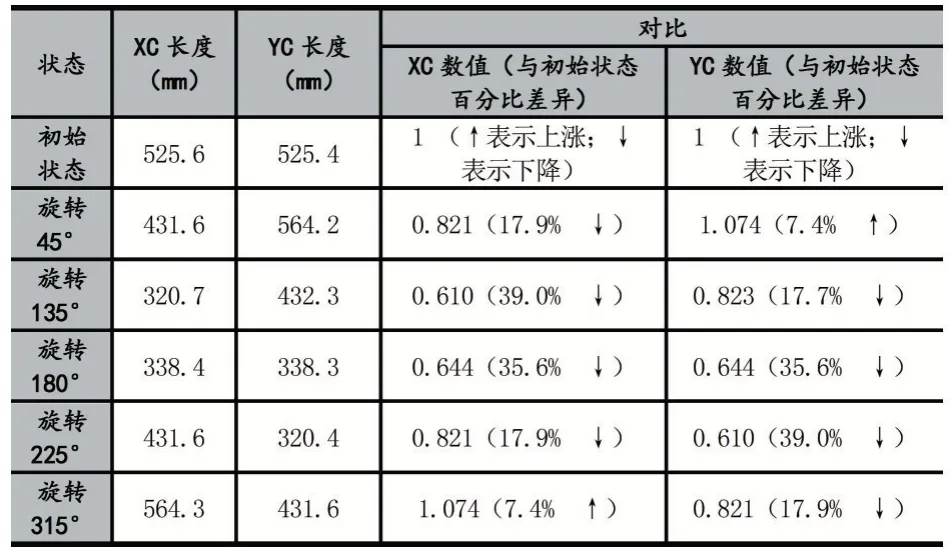
表2 不同状态下无人机构型XC及YC长度对比

图5 支撑臂在不同位置的构型尺寸测量
根据表格2中的数据可以得到,该无人机构型在变体的过程中,在支撑臂旋转了135°时,XC方向尺寸缩减率最大,达到了39.0%的缩减,在支撑臂旋转了225°时,YC方向尺寸缩减率最大,达到了39.0%的缩减,通过计算得到在支撑臂旋转了180°时,无人机构型面积缩减率最大,达到了58.53%的缩减。由此得出,该无人机构型通过变体可有效减少机身横向尺寸。
2.2 构型优化
通过图5中螺旋桨旋转仿真图发现原始构型存在以下不足:
(1)在支撑臂旋转180°时,机身中央区域有一部分阻碍了螺旋桨的下洗气流,从而容易造成螺旋桨升力损失;
(2)当构型通过变体面积减小率达到最大时,此时的螺旋桨并没有完全被保护,还有比部分超出了机身的外沿,容易在飞行的过程中剐蹭到周围障碍物,造成螺旋桨损伤。
针对无人机构型存在的不足,对其做了以下五点优化:
(1)重新调整构型的机身布局,将机身中部正方体部分优化为圆柱体;
(2)适当增加每条支撑臂长度;
(3)中部机身与外部机身由原来的四条连接支架优化为两条连接支架;
(4)保留的两条内外机身的连接支架由原来的长方体优化为圆柱体;
(5)外侧机身的宽度减小为原来的一半,由原来的20mm改为10mm。
优化后的无人机构型示意图如图6所示。

图6 优化后构型建模示意
构型优化完成后,依然选取特征最明显的六个状态进行仿真验证,得到如图7所示的优化后的构型支撑臂不同位置螺旋桨运动仿真示意图,利用UG软件自带的测量工具,得到新构型在不同状态下的XC和YC方向上的最大尺寸数据。
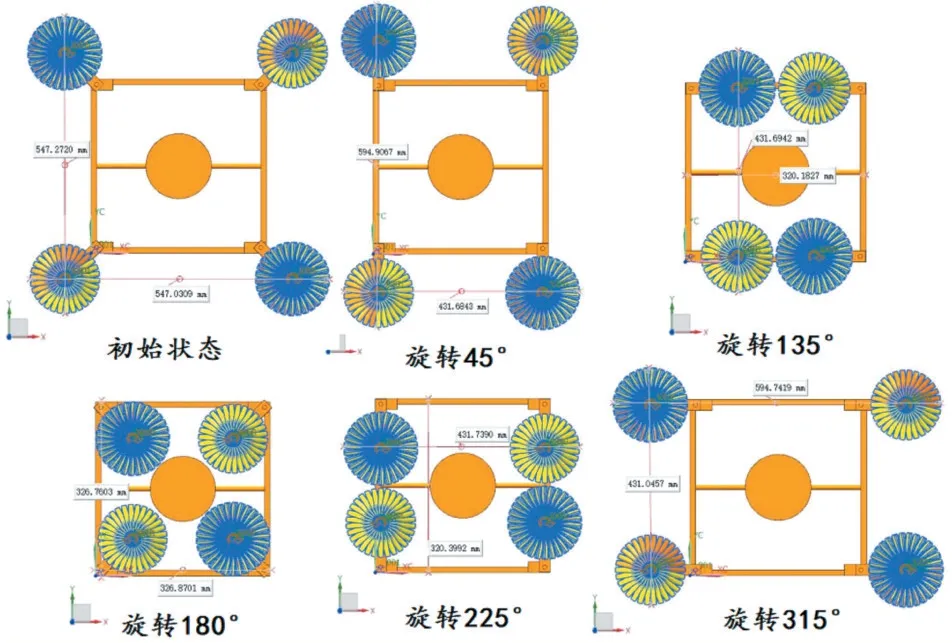
图7 优化构型支撑臂在不同位置的构型尺寸测量
将图7中优化后的构型在不同状态下的XC和YC方向上的最大尺寸数据列于表3,依旧令初始状态XC和YC数值为单位1,不同状态与其进行对比,如表3所示。
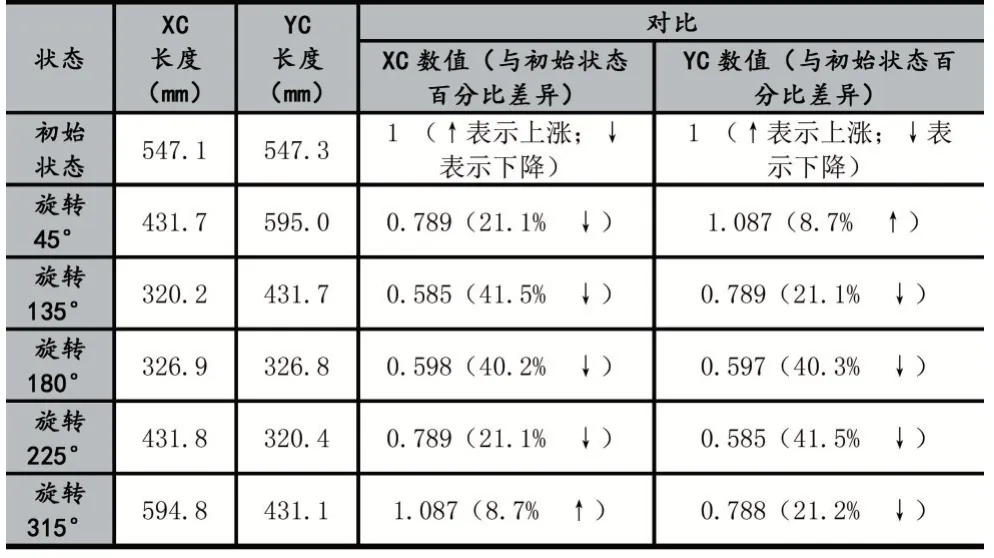
表3 优化后构型不同状态下XC及YC长度对比
根据表3中的数据可以得到,优化后的无人机构型在变体的过程中,在支撑臂旋转了135°时,XC方向尺寸缩减率最大,达到了41.5%的缩减,在支撑臂旋转了225°时,YC方向尺寸缩减率最大,达到了41.5%的缩减,通过计算得到在支撑臂旋转了180°时,无人机构型面积缩减率最大,达到了64.30%的缩减。
2.3 优化前与优化后对比
将优化前与优化后的几个典型状态下的构型对螺旋桨的气动遮挡面积进行对比,得到如表4所示内容。

表4 优化前与优化后气动遮挡面积对比
分析比较表2、表3和表4可以得出,优化后的构型比优化前的构型有以下优点:
(1)无人机构型在初始状态时,最大构型长度优化后比优化前要长,增加了无人机的稳定性;
(2)优化后的构型由于少了两条支架,减少了整机重量;
(3)当支撑臂旋转180°时,螺旋桨已经被完全纳入到机身范围内进行保护,避免在飞行过程中受到损伤;
(4)螺旋桨旋转时产生的下洗气流冲击到机身上方的面积比优化前的构型最大减少27.4%,有效降低升力损失,增加了无人机的稳定性;
(5)优化后的构型最大横向尺寸缩减率和最大面积缩减率均比优化前的缩减率要大。
3 结果
(1)根据失火建筑物内部搜救需求和森林失踪人员搜救需求,设计了一种变体无人机构型,并构建了其三维模型。
(2)仿真验证了所设计构型在变体过程中无部件上的碰撞,可以完成变体。
(3)优化前的变体无人机构型变体后横向尺寸最大减少率为39.0%,面积最大减少率为58.53%。
(4)通过运动仿真发现构型存在可导致额外升力损失的遮挡。通过对构型参数进行优化,大大降低了遮挡面积,降低了可能的升力损失。
(5)优化后的变体无人机构型变体后横向尺寸最大减少率为41.5%,面积最大减少率64.3%,
(6)优化后的构型最大气动遮挡面积比优化前减少24.7%。
(7)研究重点在新构型的机械运动及功能的实现及分析,而在变体无人机的气动特性方面,仅进行了初步探讨,在未来需要进行深入研究。
4 结语
(1)利用建模仿真,可有效发现初始构型的重要缺陷。
(2)通过参数优化,可大大降低缺陷的影响。
(3)仿真表明,优化后的变体构型性能良好,设计合理、有效,达到预期设计目的。
(4)通过飞行器变体来提高其在建筑物内部和森林中的搜救效率既是可能的,也是合理的。
