跨平台生命支持系统设计
2021-07-01宋振兴王运斗班明莉
袁 晶,张 广,陈 锋,余 明,宋振兴,王运斗,田 瑾,班明莉
(军事科学院系统工程研究院卫勤保障技术研究所,天津300161)
0 引言
近年来,国内外频繁发生地震、洪灾、泥石流等自然灾害,给公众的生命安全带来较大的影响和威胁,且造成了大量的人员伤亡[1]。自然灾害中伤员的生命状态与常规情况相比更为恶劣,需要尽快后送至有条件的救治机构。但伤员所处的气候、地理环境通常较复杂,交通不便,伤员空间分布分散,这些为伤员的后送带来很大的挑战,增加了伤员后送时间[2]。后送途中的伤员通常处于孤立失能状态,加之错失黄金急救时间窗口,因此对伤员后送途中的生命支持装备有较高的要求。由于伤员所处的地理、气候环境和交通情况的复杂性,在实施转运时可能需要利用不同的后送手段和转运工具,如可能会采用单人/双人托运、多人搬运,以及直升机、车辆、固定翼飞机、船艇转运等方式,因此要求生命支持系统能够减少转运处理环节,并在各个转运环节中实现尽可能的无缝衔接,提高救治效率。现有的生命支持装备只能固定于有特定接口的专用车辆,缺乏多平台的适应能力[3];内部的呼吸机、复苏器等均为气动型,需要依靠压缩氧气才能驱动,在全功能作业条件下氧气消耗量极大,难以长时间工作[4-5];系统内部嵌入的模块体积大,未实现微型化,装备本身也未经过轻量化设计,质量、精度等指标都不理想[6]。本文根据紧急医学救援伤员运送途中“无缝”连续救治的需求,开展了非高压氧源依赖呼吸通气、多模式通气、微量精准输注、典型重症伤情评估、救治与监护设备小型化/便携化/集成化、微涡轮呼吸通气、结构建模等关键技术研究,设计了跨平台生命支持系统。
1 功能需求
跨平台生命支持系统需要具有如下功能:
(1)呼吸、通气功能:可对伤员进行呼吸循环支持,呼吸频率10~40次/min可调,潮气量200~1200 mL,分钟通气量≥40 L/min,具备控制、辅助等通气模式,呼气末正压(positive end expiratory pressure,PEEP)为0~30 cmH2O(1 cmH2O=98.06 Pa)。
(2)基本生命体征监护功能:可对伤员的心电、血压、体温、呼吸频率、血氧饱和度等进行监测。
(3)自动输液功能:输液速度1~1200 mL/h连续可调,输液通道数≥1个,对输液完成、漏液、空瓶、气泡、阻塞等情况具有报警功能。
(4)可跨平台使用的特性:可与各种通用后送工具进行适配,实现后送转运过程中的无缝衔接。
2 设计方法
2.1 结构设计
2.1.1 整体结构设计
跨平台生命支持系统需满足小型化、便携化、集成化的要求。利用系统建模、结构仿真、有限元分析等方法,对系统框架、各功能模块的集成结构、尺寸、质量、力学性能、人机交互等进行仿真与设计。研制的跨平台生命支持系统不含外扩部件时主机长255 mm、宽550 mm、高145 mm,质量8 kg,主机展收时间小于2 min。前面板主要用于人机交互,两侧分布监护、呼吸通气、液体输注等功能模块的接口;后面板设有可拆卸盖板,方便电池更换。为保证跨平台生命支持系统在低温条件下能够正常使用,人机交互界面选用在-40℃能够工作的低温液晶屏;为了方便医务人员观察和操作,将操作系统与呼吸机设计为共屏显示,且设计了向上8°的倾角。由于跨平台生命支持系统在紧急医学救援使用过程中使用条件恶劣,因此在人机交互屏幕上粘贴一层电磁防护透明丝网膜,在液晶屏的外侧设置可翻转的透明防护盖,确保液晶屏幕在使用过程中的安全。系统的整体结构图如图1所示。

图1 跨平台生命支持系统整机外观效果图
2.1.2 分模块结构设计
跨平台生命支持系统采用模块化的方式进行设计,主要包括生命体征监护模块、呼吸模块、输液模块、控制模块等功能模块,内部布局如图2所示。

图2 跨平台生命支持系统内部结构布局图
(1)生命体征监护模块:该模块的主要功能包括伤员生命体征监测与依据生命体征监测结果进行智能伤情辨识2个部分。伤员生命体征监测功能主要对伤员转运过程中的心率、呼吸频率、血压、血氧饱和度、体温等基本生命体征指标进行实时监测。智能伤情辨识部分的处理流程如图3所示,根据监测到的生命体征信息,首先利用自适应滤波、时频域分析等方法,抑制监测过程中的噪声干扰,挖掘出准确反应原始多参数信号特征的时频域信息,实现强干扰环境下多参数生命体征信号的准确提取。其次利用主成分分析技术对心电幅度频率功率谱面积、呼吸中值频率、血氧尺度指数等生命体征参数进行精简与优化组合,提取关键信息,进而应用支持向量机、神经网络等机器学习及其他人工智能方法,对伤员的伤情、伤势进行快速辨识与判断,为伤员的救治提供决策支持。

图3 智能伤情辨识处理流程
(2)呼吸模块:跨平台生命支持系统中集成的呼吸模块采用电动电控方式工作,具有控制、辅助、同步间歇指令通气(synchronized intermittent mandatory ventilation,SIMV)、气道持续正压通气(continue positive airway pressure,CPAP)等通气模式。呼吸模块的气路结构如图4所示,由调压阀、负压泵、控制阀、比例阀、风机、二位三通阀、氧传感器、流量传感器组成。呼吸模块内置微涡轮增压系统,不需外接气源即可实现自动通气,解决了传统呼吸机依靠压缩氧气才能驱动以及全功能作业条件下氧消耗量大、难以长时间运转的难题。由于微涡轮增压系统的气源为涡轮风机制造的压缩空气,在制造压缩空气的过程中,涡轮风机叶片的高速旋转会产生较大噪声。为增强呼吸模块气路的使用舒适性,需要对振动噪声和空气动力噪声进行减振降噪隔音处理。
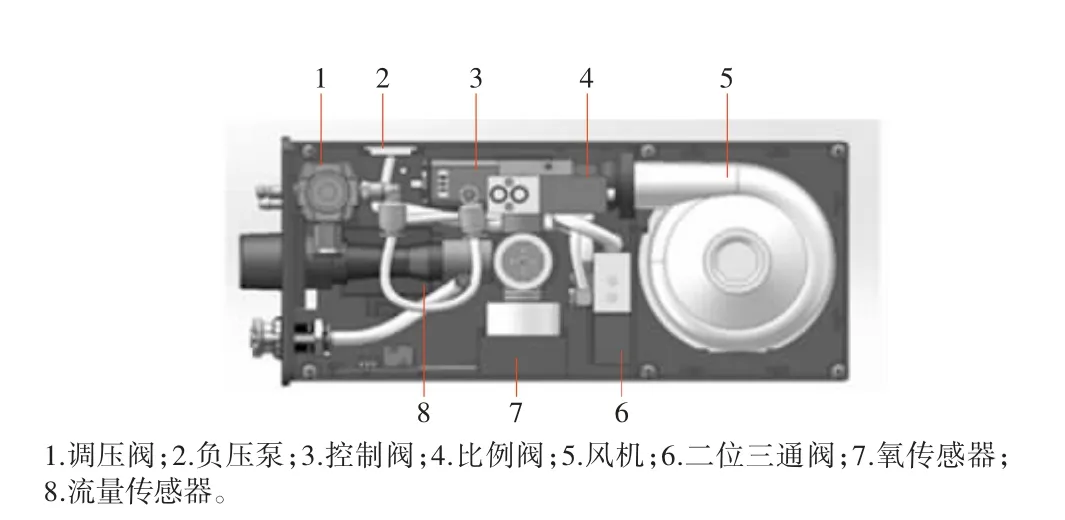
图4 呼吸模块气路结构布局图
(3)输液模块:输液模块用于在转运后送过程中为伤员提供液体输注,至少包含1个输液通道,输液速度1~1200 mL/h连续可调。输液模块设计为半挤压式结构[7-8],结构示意图如图5所示,在一根凸轮轴上分布有进口开关阀凸轮、出口开关阀凸轮、挤压凸轮和补偿凸轮,每个凸轮与一个滑块相对应,4个凸轮以一定的相位差间隔运动。输液时,步进电动机通过减速装置驱动凸轮轴转动,带动滑块按一定的运动顺序挤压弹性输液管,由于液体的流速与凸轮轴的转动速度基本呈线性关系,而输液量与步进电动机驱动凸轮的转数成正比,因此,可以通过控制步进电动机的转速实现输液量与输液速度的精确控制。输液模块还可对输液完成、漏液、空瓶、气泡、阻塞等异常情况进行报警,必要时自动停止输注,确保伤员安全。
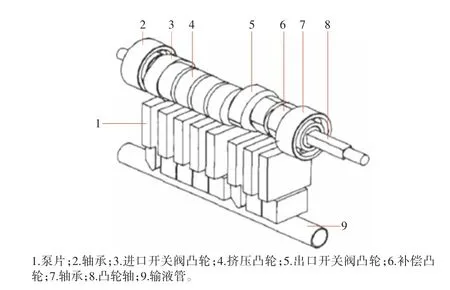
图5 输液模块半挤压式结构示意图
2.1.3 适配结构设计
为满足生命支持系统跨平台使用的要求,设计了可卡接在担架两侧使系统与通用制式担架快速连接的专用连接支撑架,用于固定生命支持系统。该支撑架包括托板和卡锁机构,具有结构简单、操作方便的特点,能够在各种转运环境下有效地支撑与保护仪器设备,可解决生命支持系统随伤病员担架转运时的安放和固定问题。专用设备连接支撑架与通用制式担架杆及生命支持系统连接的示意如图6所示。
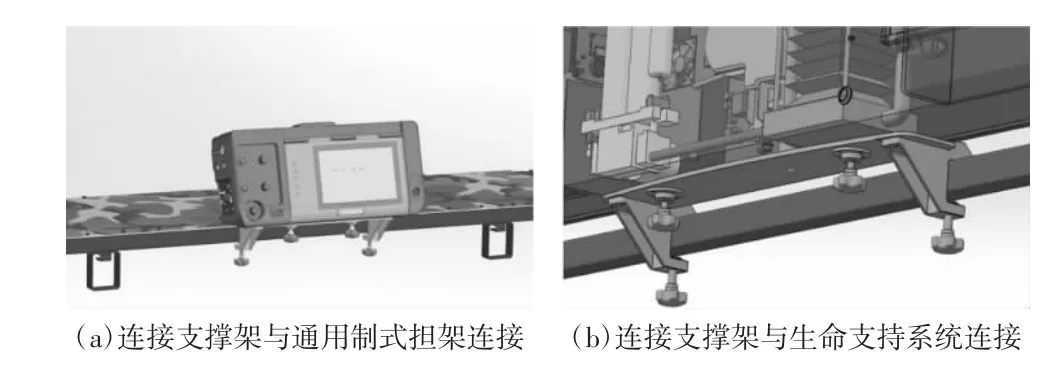
图6 连接支撑架连接方式示意图
2.2 电气系统
2.2.1 控制电路设计
跨平台生命支持系统的控制系统主要负责呼吸、监护、液体输注模块管理,数据处理/显示和人机交互等,总体控制电路框图如图7所示。电源板为整机供电,允许接入DC 12~30 V的适配电压。适配器、内置电池及外置电池3路直流电压经路径管理电路选择后,为控制模块、生命体征监护模块、呼气末CO2模块、呼吸模块、输液模块进行供电。控制电路采用RS232串口通信方式与各功能模块进行通信,控制读取、显示生命体征信息、呼气末CO2体积分数信息等数值,并能对呼吸模块的呼吸潮气量、呼吸频率、呼吸模式等进行设置,同时实现对输液模块的输液速度、输液量等的闭环控制。
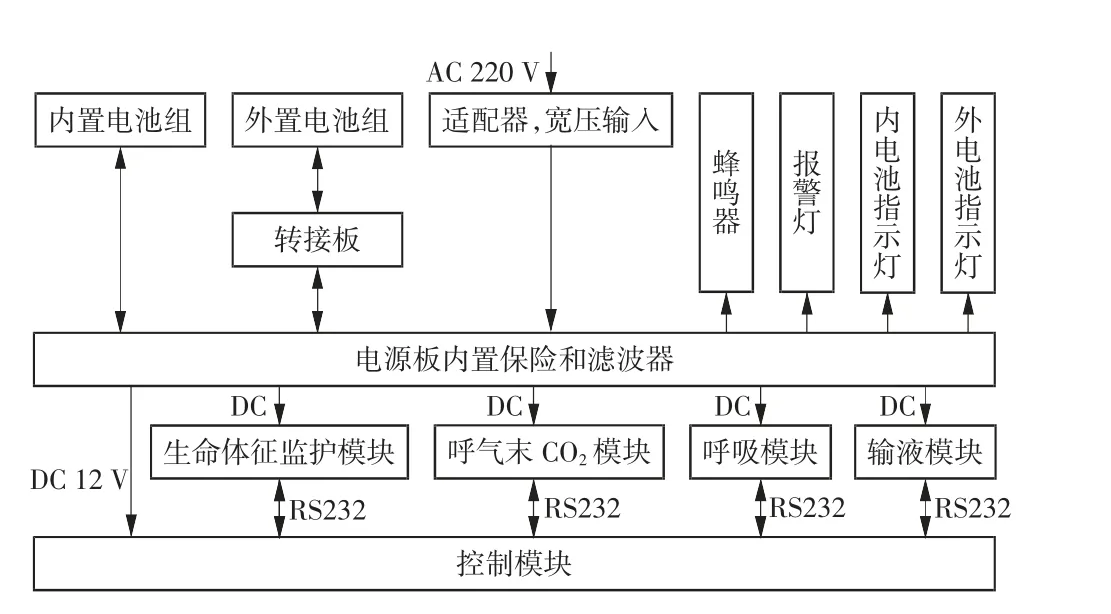
图7 跨平台生命支持系统总体控制电路框图
2.2.2 分模块电气系统设计
输液模块:输液模块通过将微控制器作为核心控制器,利用步进电动机驱动半挤压式输液结构,由于步进电动机可能存在振荡或失步现象,因此采用闭环控制的方式,确保对输液速度和输液量的精确控制。步进电动机闭环控制原理框图如图8所示,控制系统微控制单元(microcontroller unit,MCU)接收时序脉冲信号CLK,将其放大后送往步进电动机,控制步进电动机工作;步进电动机带动编码器旋转,编码器对旋转角度进行检测,并以脉冲形式反馈给控制单元进行计数;MCU将编码器反馈的脉冲和接收到的脉冲进行比较,如出现丢步,MCU可根据差值继续发送脉冲,补偿丢步,从而实现步进电动机的闭环控制。在故障报警方面,利用编码器实时反馈的电动机转数或通过压力传感器实现阻塞报警功能,利用非接触式超声波气泡检测传感器实现气泡检测报警功能。

图8 步进电动机闭环控制原理框图
呼吸模块:呼吸模块采用闭环控制的方式实现潮气量的精确控制(如图9所示),利用单片机产生脉冲宽度调制信号驱动涡轮风机旋转,通过流量传感器检测涡轮风机送出的空气流量并反馈给单片机,单片机将流量传感器反馈回的空气流量与预设流量进行比较并利用高精度PID(proportional integral derivative)控制算法对涡轮风机进行闭环控制,进而实现对潮气量的精确控制[9-10]。通过步进电动机对主气路阀体进行控制,决定通气主气路在某一时刻气源的通断。在空氧混合模式下,高压氧气通过减压阀进入主气路,通过二位三通阀控制空氧混合气路的通断,从而实现不同的空氧混合浓度。
电源管理模块:为保证跨平台生命支持系统的正常工作,系统中控制、监护、输液、呼吸等功能模块采用单独供电的模式进行供电。电源管理电路原理框图如图10所示。220 V的交流输入电源经AC-DC适配器后转换为直流电压,经直流滤波器后送至充电电路。充电电路负责对内/外电池组进行充电,适配器转换后的电压、内置电池电压、外置电池电压3路直流电压经路径管理电路选择后输出电压V1,为系统各功能模块供电。为保证整机不间断工作,当3路电压中有任意一路满足供电要求时,路径管理电路可实现电源路径的自动切换。单片机的供电由V1经低压差线性稳压器[11](low dropout regulator,LDO)后供给,且设计有一键开关电路:在有外接网电源时自动对单片机电路上电,用于充电状态指示;在没有外接网电源时,可实现按键开关自锁,实现整机上电;已开机状态下,可通过长按按键的方式实现关机。控制模块的供电由V1经过DC-DC降压后供给;生命体征监护模块、输液模块、呼气末CO2模块的供电由V1经过DC-DC降压后再经LDO后供给;呼吸模块和风扇的供电由V1经受控开关后直接供给。
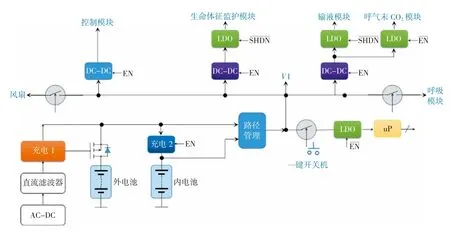
图10 电源管理电路原理框图
通信管理模块:在通信构架中,以控制模块为中央控制器。生命体征监护模块、输液模块、呼吸模块、呼气末CO2模块及单片机这5个部分与控制模块之间采用RS232串口方式通信;飞梭、按键电路与控制模块之间采用通用型输入/输出(general purpose input output,GPIO)方式通信;触屏、外部USB接口这2个部分与控制模块之间采用USB方式通信;外部局域网(local area network,LAN)接口与控制模块之间采用以太网方式通信。充电管理及声光报警电路与单片机之间采用GPIO方式通信。通信管理电路原理框图如图11所示。

图11 通信管理电路原理框图
3 实验结果
3.1 鉴定检验结果
跨平台生命支持系统已在国家食品药品监督管理局天津医疗器械质量监督检查中心进行了鉴定检验,主要检验结果详见表1,结果表明跨平台生命支持系统满足预设的功能要求。
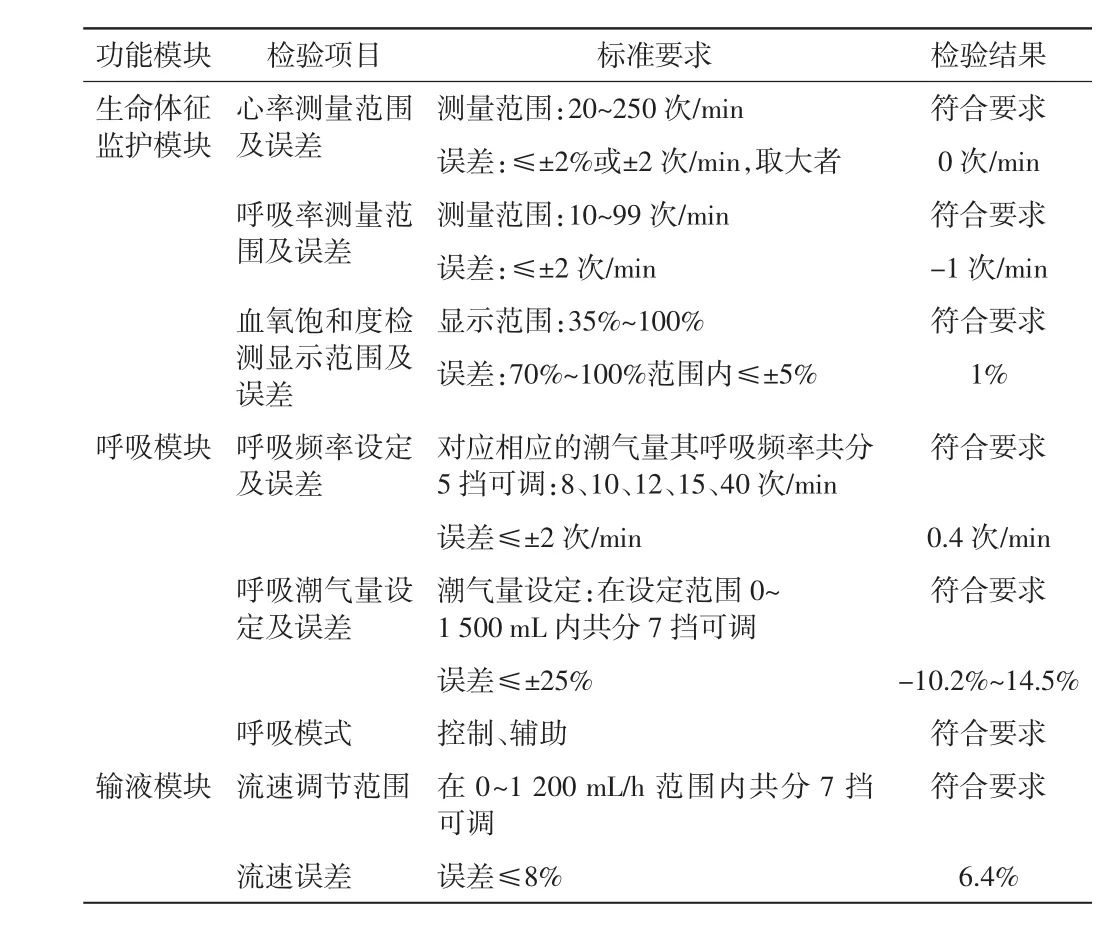
表1 跨平台生命支持系统鉴定检验结果
3.2 示范应用结果
跨平台生命支持系统已分别于2020年1月在吉林省长春市、辽宁省沈阳市,2020年8月在广东省广州市,2020年9月在浙江省湖州市进行了寒区、热区及温区的示范应用(如图12所示),对系统的可靠性进行了全面系统的检验。示范应用结果表明,跨平台生命支持系统功能完备、实用性强,可实现呼吸通气支持、生命体征监护、液体精准输注等功能,可与多种后送转运工具进行快速卡接,实现多种转运工具间的无缝衔接;系统稳定性良好,在3种环境条件下均可正常使用,未出现故障、死机、失灵等情况。此外,跨平台生命支持系统体积小、质量轻、展收方便、待机时间长,较适合在突发自然灾害、公共安全事件现场急救、院外急救等情况下使用。
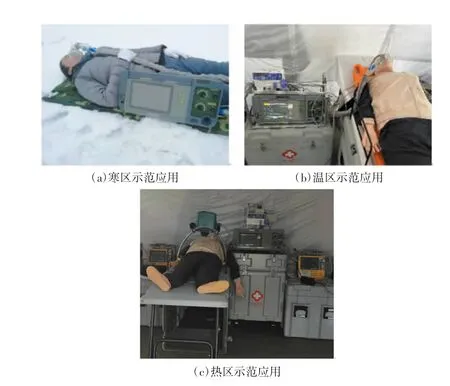
图12 跨平台生命支持系统寒区、温区、热区示范应用
4 结语
突发自然灾害及公共安全事件造成的大量伤员往往不能在第一时间得到有效救治,且具有所处气候及交通条件恶劣、后送时间长、后送工具多样等特点,为保证伤员在后送过程中能够得到有效的生命维持与救治,需要途中生命支持系统具有便携化、智能化的特点,能够与汽车、火车、直升机等多种后送工具进行适配卡接。本研究利用系统建模、结构仿真、有限元分析等方法,对跨平台生命支持系统的整体结构、各功能模块的结构、适配结构、电路系统进行设计,研制出的跨平台生命支持系统具有呼吸通气支持、生命体征监护、液体精准输注等功能,能够与多种后送转运工具进行快速卡接,实现多种后送工具间的无缝衔接,提高了突发事件中伤员的救治效率,有效减少了伤亡率。但跨平台生命支持系统还存在一定的不足,呼吸模块的智能化程度有待进一步优化提升,通过智能化辨识患者的氧合程度、智能调整通气模式,可在后送途中为患者提供更高质量的通气支持。
