机械振动干扰下人体目标识别技术研究
2021-07-01王昭昳王健琪张自启马洋洋许兆坤白思源薛慧君
王昭昳,王健琪,张 杨,史 刚,张自启,于 霄,马洋洋,许兆坤,白思源,薛慧君*
(1.空军军医大学军事生物医学工程学系,西安710032;2.联勤保障部队第942医院卫勤处,银川750001)
0 引言
超宽带(ultra-wideband,UWB)生物雷达发射的电磁波能穿透倒塌的建筑废墟检测人体呼吸引起的体表微动,从而快速识别和定位压埋人员[1-3]。UWB生物雷达技术不需要任何电极或传感器接触生命体,可远距离获取生命信息,与激光、红外、声波探测技术相比,UWB生物雷达不受温度、噪声、废墟孔径等影响,因其良好的抗干扰能力和穿透性被广泛应用于地震、塌方等灾后救援[4-7]。现代灾后救援现场,大型工程机械(如装载机、挖掘机等)进行挖掘、破拆等作业已是常态,工程机械作业会引起强振动,如果该振动被生物雷达探测到,必将对压埋人体搜救造成影响。
目前,针对探测环境中振动干扰的问题,国内外学者已做了相关研究。Nezirovic等[8]使用UWB生物雷达探测压埋人体,利用奇异值分解技术抑制环境中的振动干扰,结果表明若雷达回波信噪比过低,则该方法去噪效果不理想。Zhang等[9]使用双天线、双点频连续波雷达系统采集操作人员呼吸信号作为干扰源,采用自适应滤波结合互相关算法有效抑制了操作人员的呼吸干扰,结果指出若被测目标和操作人员呼吸频率差值小于0.04 Hz,则该方法失效。Li等[10]使用连续波雷达远程探测人体生命信号,采用自相关和自适应谱线增强算法消除人体不规律振动干扰。Schires等[11]采用生命体征反向测量的相位检测技术、基于信号频率差异的频率估计法降低信号干扰,使用生物雷达探测系统对静止人体和汽车驾驶员进行探测实验,结果显示该方法可有效去除因汽车行驶振动引起的驾驶员身体惯性振动干扰,能准确探测人体呼吸和心跳信号。Castro等[12]针对驾驶员身体振动干扰,采用加速度传感器采集汽车座椅振动信号,假设人体振动与其方向相同,在已知运动方向和加速度的情况下,采用基于独立成分分析的方法分离人体振动干扰和生理信号。
本课题组前期研究发现机械振动幅度远大于人体呼吸引起的体表微动幅度,且部分振动信号频率处于人体呼吸信号频段内[13-14],无法采用传统的时域或频域滤波方法抑制机械振动干扰。根据文献[15],静止人体的呼吸信号在探测范围内与UWB生物雷达保持恒定距离,由于被测人体具有一定厚度,呼吸信号也出现在目标位置区域的相邻单元,当雷达接收人体呼吸信号时,采用小波熵算法可以识别人体目标。本研究中机械作业模式具有多样性和随机性,单个小波基函数难以抑制多种振动干扰。经验模态分解(empirical mode decomposition,EMD)具有很强的频率分选性能,可根据振动信号自身的局部时间特性,将信号分解为由高频到低频的多个固有模态函数(intrinsic mode function,IMF),但鉴于EMD可能造成信号模式混叠的弱点,集合经验模态分解(ensemble empirical mode decomposition,EEMD)被提出作为EMD的升级算法[16]。因此,本文采用添加白噪声辅助数据分析的EEMD算法对UWB生物雷达回波数据进行自适应分解,借鉴熵的定义,计算不同模态能量复杂度,根据作业机械和人体目标熵值的凹口宽度差异识别人体目标。
1 机械振动干扰下人体目标探测识别的研究分析
课题组前期开展了机械振动干扰下的人体目标探测实验研究。以中心频率为500 MHz的UWB生物雷达为探测平台,柳工856号装载机的3种常规作业方式包括怠速(发动机振动引起的机身不规则抖动)、挖掘挥铲、移动作业作为振动干扰源,人体目标距离雷达2.5 m,装载机距离雷达6~9 m,雷达在装载机作业振动干扰下对人体目标进行探测,采用能量累积算法[17]对雷达回波数据进行处理,结果如图1所示。图1(a)中距离雷达约2.4 m处有明显的能量谱峰,根据先验知识,此处为人体目标。图1(b)中距离雷达约7.3 m处有机械振动能量谱峰,未识别出人体目标。同理,图1(c)只显示距离雷达约7 m处为机械移动作业振动的能量谱峰。以上结果说明,怠速能量较低,对人体探测未造成干扰,而挖掘挥铲和移动作业能量较高,该实验条件下基于能量累积的方法无法识别人体目标。
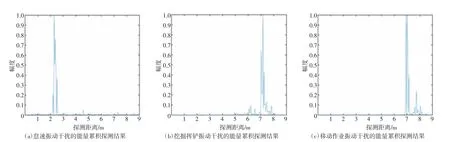
图1 机械作业振动干扰下的人体目标探测结果
2 机械作业振动信号的时、频分析
UWB生物雷达在自由空间中采集装载机上述3种常规作业的振动信号,时域和频域信号处理结果如图2所示,可见怠速振动信号频率成分复杂、能量相对较低,挖掘挥铲和移动作业产生的振动信号主频率处于人体呼吸频段(0.2~0.7 Hz)内,且振幅较强。

图2 装载机常规作业振动信号时、频分析图
使用自相关算法验证3种机械振动信号的平稳性,结果如图3所示。从图3可以看出怠速振动信号相关性较差,挖掘挥铲作业振动信号平稳、相关性较好,移动作业振动信号相关性虽低于挖掘挥铲振动信号,但仍较为规律。

图3 机械作业振动信号的自相关结果
3 UWB生物雷达探测平台及算法研究
由于机械挖掘挥铲和移动作业振动信号在时、频域方面与人体呼吸信号相似,且可能存在同频问题,传统的时频处理方法难以抑制机械振动干扰。由于挖掘挥铲和移动作业振动信号具有较强的规律性,根据文献[15],振动信号熵会低于探测环境噪声,且装载机尺寸较大,机械振动信号熵谱图凹口较宽,因此,本文拟利用机械挖掘挥铲和移动作业振动信号的平稳性以及人体目标和装载机的外形差异,借鉴熵的理论知识,研究机械挖掘挥铲和移动作业振动干扰下的人体目标识别方法。
图4为UWB生物雷达回波的二维数据矩阵。探测距离上每个距离点信号为慢时间信号,对不同距离的慢时间信号进行EEMD分解后可获得每个慢时间信号在不同特征尺度下的IMF分量。令雷达回波某个距离点对应的慢时间信号为x(t),则
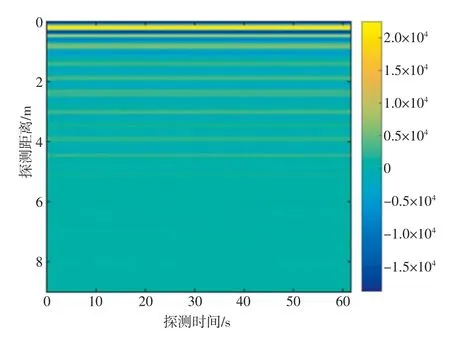
图4 UWB生物雷达回波的二维数据矩阵

式中,ci(t)为各IMF分量(i=1,…,k),为本征模态函数;rk(t)为残余分量。
设Ei(j)为函数ci(t)第j(j=1,2,…,L)个采样点对应的指标能量值,该慢时间信号EEMD后第i个本征模态函数的能量值为
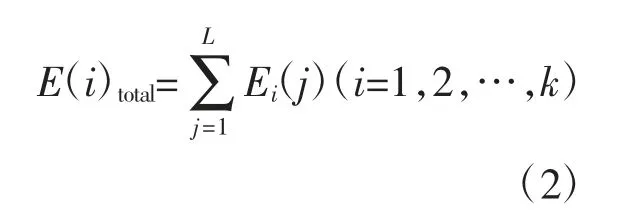
式中,k为不同慢时间信号分解后IMF的个数;L为ci(t)的采样点。
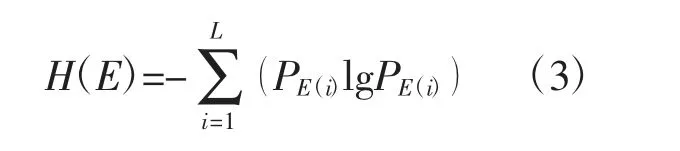
由公式(2)可计算得出ci(t)不同尺度下IMF能量分布的指标能量概率(其为一个慢时间信号的总能量),从而求出不同距离点信号的EEMD熵:中
4 实验场景与结果
4.1 实验场景
为了验证EEMD熵识别方法的可行性,分别进行了2组自由空间和2组穿墙探测实验,4组实验中装载机作业状态均为挖掘挥铲和移动作业,场景如图5所示。图5(a)中40岁成年健康男性正对UWB生物雷达站立,距离雷达约2.5 m,身体保持静止,正常呼吸,装载机机身与雷达最近距离约为5 m;图5(b)中目标A为40岁成年健康男性,目标B为27岁成年健康男性,与雷达距离分别为2和4 m,均正对雷达静止站立,正常呼吸。图5(c)、(d)为穿墙探测实验,受场地空间限制,作业机械在雷达侧后方8 m,图5(c)中目标为27岁成年健康男性,与雷达分别位于砖墙两侧,目标距离雷达约3 m,静止站立,正常呼吸;图5(d)中目标B为24岁成年健康男性,目标A为27岁成年健康男性,两目标与雷达距离分别约3和5 m,面对雷达静止站立,正常呼吸。自由空间中雷达探测距离为0~9 m,穿墙探测距离为0~12 m。以上4组实验每组重复10次。
图5 不同场景下的探测实验
4.2 实验结果
采用EEMD熵方法处理上述4组实验数据,结果如图6所示。图6(a)中距离雷达天线2.5 m处的EEMD熵值较低,根据文献[15]可知此处为人体目标,而5~9 m的EEMD熵值也低于其他区域,且凹口较宽,可知此处为机械振动区域。同理,图6(b)中2和4 m处为人体目标,5~9 m处为作业机械活动区域。图6(c)中3 m处EEMD熵值较低,此处为人体目标。图6(d)中3和5 m处EEMD熵值较低,分别对应2个人体位置。由于探测当天有微风,墙体发生微晃,墙体的周期振动信号在相邻距离点扩散,使得穿墙探测结果中人体目标熵谱图凹口宽度大于自由空间中人体目标的熵谱图凹口宽度。从后2组实验结果分析,因为作业机械处于雷达天线侧后方8 m处,位于雷达主波束探测区域以外,并未对人体目标的探测造成干扰。
图6 装载机振动干扰下人体目标的EEMD熵识别结果
5 结语
本研究使用中心频率为500 MHz的UWB生物雷达采集装载机怠速、挖掘挥铲和移动3种常规作业的振动信号,并分析振动信号的时频特性,发现挖掘挥铲和移动作业振动信号的时频特性与人体呼吸信号相似,且自相关处理结果显示这2种振动信号较为平稳,推测机械振动信号熵低于环境噪声。根据机械振动信号的平稳特性及机械与人体目标的体积差异,提出了基于EEMD熵的人体目标识别算法,在自由空间和穿墙条件下进行机械振动干扰下的人体目标探测实验,结果显示该方法在一定程度上提升了机械作业振动干扰下人体目标的识别效率,为复杂条件下UWB生物雷达探测人体目标提供了有意义的借鉴。此外,在穿墙探测实验中,由于作业机械处于雷达侧后方8 m,雷达旁瓣电磁波能量较低,此实验条件下,作业机械振动并未对人体探测造成影响,后期会进一步完善实验方案,深入探讨穿墙条件下机械振动干扰的人体目标识别问题。
